

关于机器人使用的电机选择分析
描述
但是使用高级算法可以更好的控制马达,比如在电机控制器中嵌入PID(比例 - 积分 - 微分)或FOC(磁场定向控制,有时也被称为矢量控制)。此所需电机操作匹配实际的负载和负载变化,提供增强的、更精确的性能。例如,马达控制算法/程序事关转子惯性,并相应地调整电机驱动,从而降低因机械问题导致的故障。使用定制算法能够使加速和扭矩控制地更精确。
相较于有刷电机,无刷电机(BLDC)需要更复杂的电子控制装置,但也提供更佳性能。 BLDC电机通常需要通过霍尔效应传感器、光学编码器或者通过检测反电动势来进行位置反馈。
机器人中的BLDC电机中经常使用的一种类型是步进电机(图3),它采用中心芯周围的永磁体环来切换电磁场。步进电机并不是传统意义上的“旋转”;相反,步进轴可以以有限的、一步一步的增量(步骤)方式移动,所以,除连续旋转外,可以仅移动完整旋转的一小部分。步进电机具备完全可重复的运动控制;通过指令控制,步进轴可以返回到它之前所在的某个具体位置。
“步”的角度通常可以小到1.8⁰,其中360⁰(一转)产生约200步的动作。30⁰的步进角转一圈共需12步(12×30= 360)。步进角或每转的步数取决于电机具有的永久磁铁数量,但更高或更低值也是可以的。
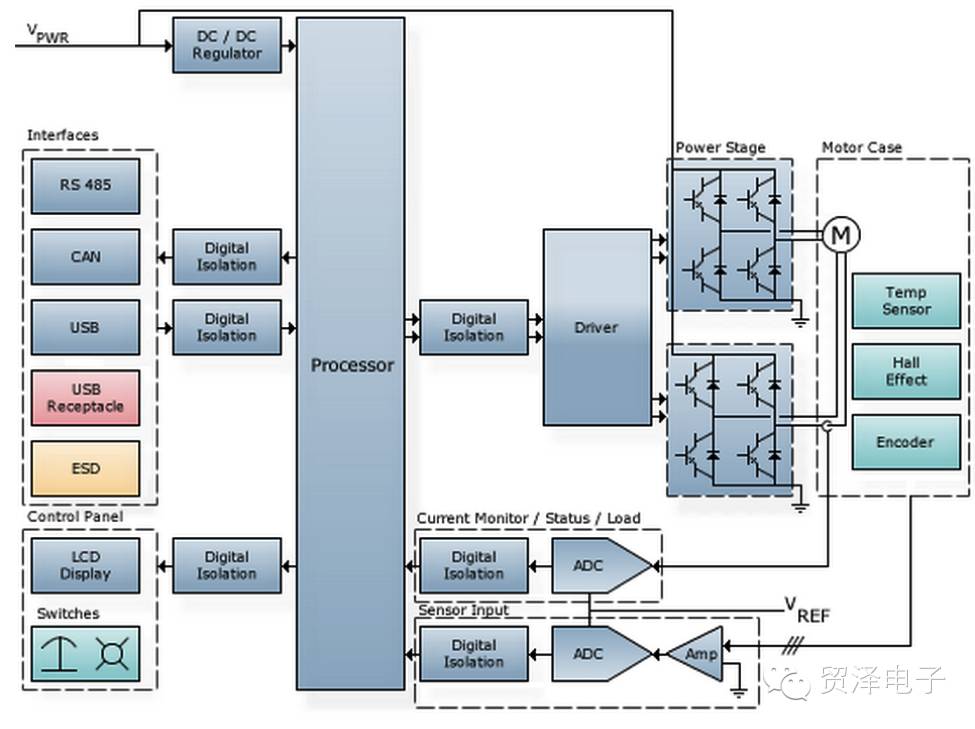
图3:包含所有部件的步进电机框图。 MOSFETS位于功率级。来源:http://www.mouser.com/applications/motor-control-stepper/
在步进电机中,如果电源位于的“连通”状态,但没有步进指示,它们将维持原有位置。步进电机可以在低转速下提供高扭矩。使步进轴移动的最直接方式是按序开关电磁铁,但可能会导致颤动或振动。
无刷直流电机和步进电机之间存在重叠的应用类型。步进电机更适合于要求精确往复运动的应用,如拾取和放置,而不适合长时间的连续转动,以及一些较小型应用,不需要电机提供高转矩或速度。另外,步进电机能效表现上不如无刷直流电机。
还有许多其它电机选项。电机族谱树很长而且复杂,还有许多孪生兄弟姐妹。例如,永磁同步电机(PMSM)是无刷直流电动机(相对于转子)和AC感应电机(相对于定子结构)的组合。它封装较小,却具备高效率,高转矩/重量比,快速响应时间,并且容易控制的优势,但成本也高。
控制要求精度
机器人运动系统不仅仅是一个电机;它包括三个主要功能块:
1.实时控制器,它有以下三种实现方式:
o一个通用的、计算速度快的处理器,运行运动控制固件
o一个DSP型的FPGA,可编程为控制类应用
o一个专用控制器IC,使用硬连线嵌入式算法。
2.一个或多级串联驱动器,从控制器输出获取低电平信号,并向控制器输出电子开关所需高电压/电流的信号。
3.MOSFET(或其它的开关元件,例如IGBT或双极晶体管),它实际上控制到电机绕组的电流流动。
选择用于电机的MOSEFT需要知道电机和绕组的电流和电压要求。随后开关MOSFET,需要驱动器,反倒由MOSFET的等级来确定。实际上,取决于MOSFET尺寸存在一系列升压驱动器。
选择控制器时的常见问题
选择何种控制是一种策略选择,需要在具体供应商和型号选择之前决定下来。这里存在诸多权衡,比如使用通用处理器,它非常适合于电机控制,以及采用计算友好FPGA或专用的控制集成威廉希尔官方网站 (后者通常来自特殊的运动控制供应商)。设计人员必须考虑的一些关键点包括:
•你需要控制算法的复杂性和复杂度如何,以及需要多少I / O?
•谁提供控制算法和代码:集成威廉希尔官方网站 供应商,与他们合作的第三方,或无关联的第三方?他们如何验证和测试你的电机和应用
•你需要多少用户可编程性?甚至专用的、非可编程控制器允许用户选择算法类型,闭环控制模式(位置,速度,加速度)以及设定操作参数。
•电机和应用是否具有独特属性?如果属实,可编程集成威廉希尔官方网站 是更好选择。是否有对算法的持续个性需求?在这种情况下,具有硬连线嵌入式算法的专用集成威廉希尔官方网站 与比完全可编程的集成威廉希尔官方网站 更好。
•控制器是否必需支持多种类型电机?即使类型唯一,电机尺寸是大小唯一,还是需要保证在某个范围内?
•供应商提供何种级别的技术支持?他们的实际电机动手经验如何?他们是否提供已测试过的详细参考设计,包括控制IC和MOSFET驱动器之间的接口?
•是否需要关心认证问题,比如强制效率(很多电机应用现在必须满足各种“绿色”标准)?如果属实,那么供应商是否了解并满足它们,不管是组件还是算法?
开发套件显示控制器和接口能力
对于许多工程师来说,将所有部件聚集在一起——包含嵌入式或独立算法的控制器,驱动程序和MOSFET——是一个复杂任务,并且他们并不想“反复造车”。因为这些原因,许多供应商提供评估板或完整套件,包括控制器、示范算法、驱动程序和MOSFET。其中一个示例是飞思卡尔MTRCKTSPNZVM1283三相无传感器PMSM套件,使用无传感器电机控制技术来驱动三相BLDC或PMSM电机。这种相当复杂的套件旨在实现通过使用MCU集成ADC模块方式的反电势感应来进行快速原型设计和评估。或者,同一套件(带MC9S12ZVML12 MCU)可以配置为基于传感器的评估,其中具体使用霍尔传感器或分解器来操作。
伴随科技的进展,包括通过提高电机控制和传感实现精确驱动等技术的进步,机器人将有一个激动人心的前景,并将创造新的机遇。传感,控制和电机是三大关键领域,这里的持续创新将塑造机器人的演进方向。
-
机器人电机选择2016-03-15 0
-
自律型机器人制作入门.基于Arduino2016-06-23 0
-
直角坐标机器人如何选型2017-08-16 0
-
智能打电话,机器人哪家比较好 如何选择合适的电销机器人2018-05-03 0
-
如何选择机器人电机2018-10-19 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
选择机器人电机的几点思考2019-03-12 0
-
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法2020-06-30 0
-
选择微型机器人电机需要考虑什么?2021-01-22 0
-
如何选择扫地机器人的电机2021-03-02 0
-
机器人关节用什么电机?2021-05-27 0
-
一般机器人驱动机构中电机的选择问题2021-08-27 0
-
如何搭建实体机器人ros底盘2022-01-20 0
-
如何选择机器人电机_机器人电机选择举例2018-07-11 10473
全部0条评论

快来发表一下你的评论吧 !
