

智能电网的基础详细教程:电力系统稳定
智能电网
描述
一、电力系统稳定概述和分类
稳定的分类其实至今为止都没有一定统一的定论,欧洲和美洲很多都不一样,有传统的分类也有现在的分类。姑且按我自己的想法梳理。
电力系统稳定分为三个电量的稳定:电压稳定、频率稳定、功角稳定。
功角的稳定又分为三种:静态稳定、暂态稳定和动态稳定。
其中,静态稳定是系统受到小扰动后系统的稳定性;暂态稳定是大扰动后系统在随后的1-2个周波的稳定性;动态稳定是小扰动后或者是大扰动1-2周波后的,并且采取技术措施后的稳定性。
上述三个稳定性概念,采用一个碗中放置一个球,用这个球在受到外部作用后是否回到原来的位置来比喻说明:
一个碗中放一个球,当这个球受到外部的一个小力量,它就偏离原来位置,如果这个碗高度很矮,矮的像一个盘子,这个球就有可能从碗中掉下来,我们就说这个系统静态稳定不足。事实上,电力系统的小扰动不断在发生,碗中的球也就在碗底不断的在滚动,碗的高度越高,这个系统的静态稳定极限就越大,系统也就越稳定。
当碗中的球受到一个大的外部力量,这个球能否还在碗中就是系统的暂态稳定问题。提高系统暂态稳定的最主要措施就是快速的继电保护。继保的作用就相当于减少这个外部力量的作用时间,继保越快,外力的作用时间就越短,这个球就不会一下子掉下来。而自动电压调节器此时作用相当于自动改变这个碗的坡度,当这个球上升时增加坡度,当下降时就减少这个坡度,使这个球在碗中滚动幅度迅速减小。
如果这个碗和球之间的摩擦很小,这个球受到扰动后在碗中来回滚动时间就很长,特别是,如果这个扰动的外力不断的来回施加,就比如我们不断的荡秋千,这个球就永远不停的来回滚动甚至掉下来,我们就说这个系统的动态稳定性差。这里的摩擦阻力相当于电力系统的阻尼,这个来回不断施加的外部力量就相当于自动电压调节器产生的负阻尼。一般来说,自动电压调节器在电力系统的动态稳定中起坏作用,产生负阻尼,使整个系统阻尼减少。当我们在自动电压调节器中增添PSS装置,PSS就把自动电压调节器原来所产生的负阻尼变为正阻尼,相当于增加碗和球的摩擦系数,使球的滚动幅度快速减小,于是这个系统的动态稳定性就满足要求。
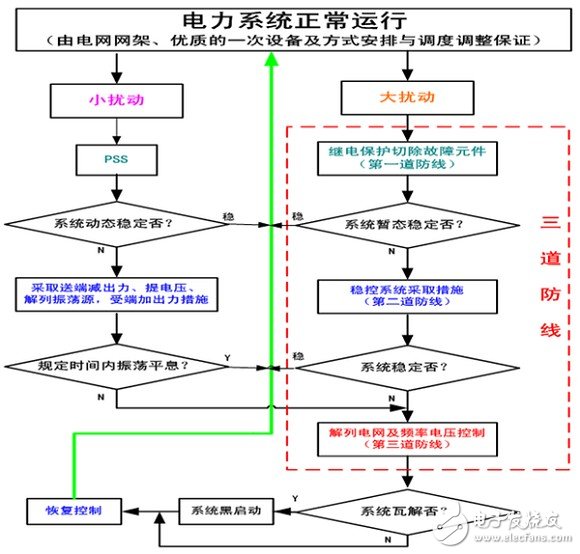
《电力系统安全稳定导则》规定我国电力系统承受大扰动能力的标准分三级:
第一级标准:保持稳定运行和电网的正常供电[对于出现概率较高的单一元件故障,不采取稳定控制措施];
第二级标准:保持稳定运行,但允许损失部分负荷[出现概率较低的严重故障];
第三级标准:当系统不能保持稳定运行时,必须防止系统崩溃,并尽量减少负荷损失[出现概率很低的多重性严重事故]。
国网的安全稳定三道防线总体上应满足三级标准要求。
继电保护是第一道防线,但第一道防线的正确动作并不一定能完全满足稳定导则中规定的第一级标准,例如,一些联系相对薄弱的电网连单瞬、单永故障都存在问题,需要采取稳定控制措施来提高电网的送电能力;
稳定控制系统是基于对电网的稳定分析而配置的,它只针对预想的运行方式、预定的故障类型,如果出现了预想以外的方式或故障,则稳控系统不能保证电网的稳定性,即第二道防线是人们主动出击采取的措施;
第三道防线则是兜底的,凡是多重故障、预想之外的事故导致系统失去同步或频率、电压异常,由第三道防线的装置采取控制措施,防止事故扩大,防止系统崩溃,即第三道防线是被动应对大事故的手段。
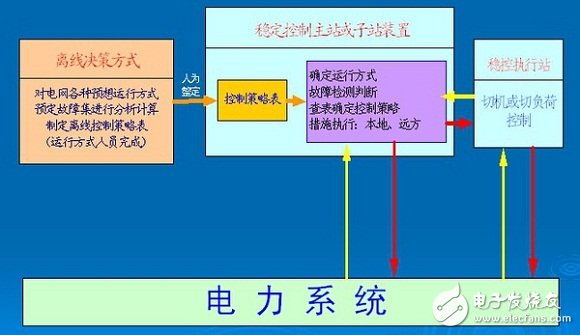
电力系统稳定控制阶段示意图如下:
二、电力系统功角稳定
前面已经说过,功角的稳定分为三种:静态稳定、暂态稳定和动态稳定。
在设计和运行系统中,主要对如下三个方面的稳定性进行计算。第一类::最大量的分析计算是暂态稳定性。由于系统的运行操作和故障是大量地经常发生的,因此,对暂态稳定性的正确评估,对于电力系统的安全运行具有第一等重要意义。第二类:较少的是计算分析长距离重负荷线路的静态稳定裕度。出现静态稳定问题的情况,多属单机对主系统模式或单机经大环网分别接入系统模式。第三类:最少但最引起研究人员兴趣的是动态稳定的计算分析,即判定是否出现周期性失稳的问题。由于这种稳定破坏并非常见,在实际系统中,往往都是在事件发生后才去认真分析并寻求对策。
一般情况下,系统的暂态稳定水平低于系统的静态稳定水平,如果满足了大扰动后的系统稳定性,往往可同时满足正常运行情况下的静态稳定要求。但是,保持一定的静态稳定水平,乃是取得系统暂态稳定的基础和前提。有了一定的静态稳定裕度,就有可能在严重的故障情况下通过一些较为简易的技术措施去争取到系统的暂态稳定性。不保持静态稳定,系统无法运行;而在某些特殊情况下,例如大发水电和事故后运行方式下,却需要也可以降低系统暂态稳定水平而短期地运行。这种临时做法合乎逻辑的理由是。影响系统暂态稳定最为严重的短路故障,具有概率性质,因而可以认为不会在那样的短期运行期间,又同时发生足以招致失去暂态稳定的严重故障。
三、电力系统静态稳定
也可以叫小干扰稳定(这块说法不一,可以这么认为)。
静态稳定是指电力系统在某一正常运行状态下受到小干扰后,不发生自发振荡或非周期性失步,自动恢复到原始运行状态的能力。静态稳定问题实际上就是确定小扰动下系统的某个运行稳态点能否保持。系统小干扰稳定性取决于系统的固有特性,与干扰的大小无关。(若电力系统受到小扰动后,在较长过程中,在自动调节和控制装置作用下的稳定问题,则被划为动态稳定问题,姑且在这块先介绍了)。
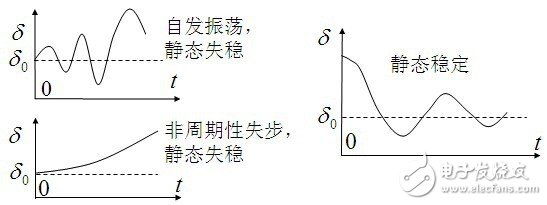
电力系统受到小扰动之后可能出现的不稳定通常分为两种形式:
由于缺少同步转矩,发电机转子角逐步增大,滑行失步;
由于有效阻尼转矩不足,转子增幅振荡。欠阻尼振荡;低频功率振荡问题;
电力系统包含许多机电振荡模式,其频率通常为0.1~2.0Hz,所以常称为低频振荡
区域间振荡模式(0.1~1Hz)
区域内振荡模式(1~2Hz)
小干扰稳定性问题通常是由于系统阻尼不足引起的一种增幅振荡,小干扰分析法主要是用特征根法,根据受扰动运动的线性化微分方程式组的特征方程式的根,判断是否稳定的方法。
问题实质在于:如果小机组扰动的频率接近主网系统的固有机电谐振频率时会激发产生“共振”现象,使主网联络线的振幅愈来愈大,好像低压电网小机组产生的相对系统来说不大的一个功率振荡(摇摆),在主网内被“放大”了。
以华中电网2005年”10.29”功率振荡为例:
振荡频率为0.77Hz。
华中电网大部分500kV线路出现功率摆动,三峡外送系统振荡幅度较大,其中斗双线振荡最大,振幅为730MW左右。
鄂西北电网振荡现象明显,有多台小机组(总计40MW)被迫解列。
机组中,三峡电厂机组振荡最大,左二单机振幅(峰峰值)达到270MW。
500kV中枢点中,左二500kV母线电压振荡最大,振幅为40kV。
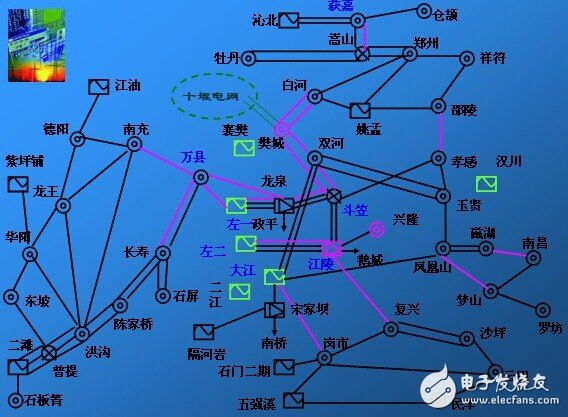
初步结论为:湖北西北电网由弱阻尼引发的同步振荡导致主网相近频率强迫振荡的可能性较大,但需对湖北西北电网阻尼变化敏感因素作进一步分析,也需要进一步研究系统发生强迫振荡的机理。
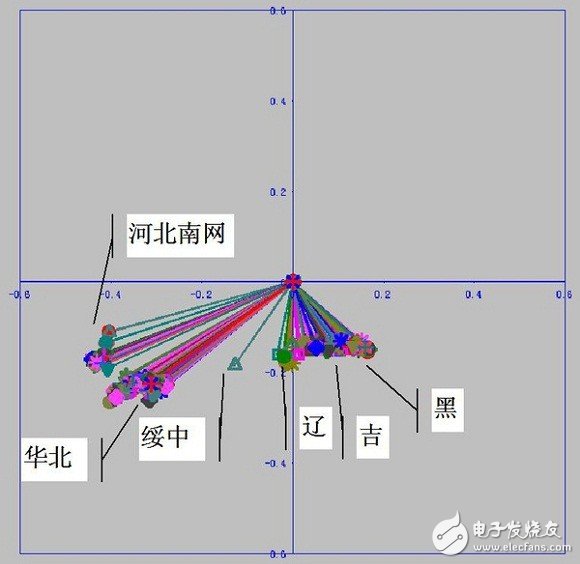
控制改善小干扰稳定性的研究方面,应区分不同的振荡模式,找出其不稳定的原因,有针对性地选择合适的控制措施。特别是联络线振荡模式的控制措施。要建立系统小干扰稳定性准则,如所有关键振荡模式阻尼比不低于3%,联络线或关键输电断面的传输极限等。在对实际系统大量研究的基础上,确定避免系统发生小信号不稳定的调度方案。软件计算一般也针对这些要素进行校核。
计算过程中,主要是分析对外网的变化(如断面潮流和方向)对区域电网的动态特性(特征根、阻尼比)的影响,然后对弱阻尼的振荡模式提出机组PSS等措施,以免电网发生低频振荡。下为小干扰分析模态图。
四、电力系统暂态稳定
1、暂态稳定标准
用来考虑大扰动对系统稳定运行的影响,是暂态稳定问题。迄今为止,各国电力系统仍然利用发生规定扰动这样的决定性方法来判断系统的暂态稳定性。实际发生过的系统大扰动模式多种多样。有的由于多种异常状态同时或相继出现而使整个扰动模式极为复杂,而普遍地规定用于设计和生产运行系统暂态稳定性的考核的扰动方式,则极为简单。例如。最常用的是单一的某电力元件无故障突然开断以及因短路故障断开等,同时认为相应的继电保护及自动装置动作正确。
扰动可按扰动严重程度和出现概率分为三类:
第I类,单一故障(出现概率较高的故障):a.任何线路单相瞬时接地故障重合成功;b.同级电压的双回或多回线和环网,任一回线单相永久故障重合不成功及无故障三相断开不重合,任一回线三相故障断开不重合;c.任一发电机跳闸或失磁;d.受端系统任一台变压器故障退出运行;e.任一大负荷突然变化;f.任一回交流联络线故障或无故障断开不重合;g.直流输电线路单极故障。
第II类,单一严重故障(出现概率较低的故障):a.单回线单相永久性故障重合不成功及无故障三相断开不重合;b.任一段母线故障;c.同杆并架双回线的异名两相同时发生单相接地故障重合不成功,双回线三相同时跳开;d.直流输电线路双极故障。
第III类,多重严重故障(出现概率很低的故障):a.故障时开关拒动;b.故障时继电保护、自动装置误动或拒动;d.自动调节装置失灵;e.多重故障;f.失去大容量发电厂;g.其他偶然因素。这块目前国内也越来越重视,稳定规定导则里面提到,但是具体分类没有这么多,省级调度运行方式对这块校核也不够,但以后应该会有这方面的预案。
校核暂态稳定,只需要按照规定的故障形态进行系统动态过程计算,当判定在扰动去除后系统可以达到新的或恢复到原来的平衡状态,就可以认为满足了要求,而不必再考虑其他额外的裕度。这是因为在计算过程中已隐含了足够的安全裕度,如下(本文不涉及具体怎么计算,毕竟我们也是用BPA之类的软件计算):
作为惯例,进行暂态稳定计算时,要求选择在实际可能的最为不利的一系列运行方式,在最不利的地点发生金属性短路故障,按给定的故障切除时间(正常情况下总是略大于实际值)等所有不利条件的组合作为前提条件。显然,必然较之实际情况严格,而具有较大的安全性。
作为设计与生产运行系统的暂态稳定性校核,总是忽略短路电流中的直流分量所产生力矩的影响,进一步使短路故障形态下的校核结果偏于保守。
暂稳措施目前采用的主要有切机、切负荷、解列联络线;电气制动、快关气门、直流调制等措施应用较少。
2)提高系统暂态稳定水平的一次措施
串补:串联电容补偿,这个之前无功那块提到过,但是那不是主要的,其主要作用还是暂态稳定方面,至于串补如何提高暂态稳定性和增加线路输送极限的内容,教科书上都有就不提了,近年来用的比较多的可控串补后续部分再说,其他和串补相关的有以下几点:
串联电容补偿只适用于送端和受端两端系统都比较强大的情况。此时线路阻抗占有整个联络阻抗的主要成份,因而对它实现串联补偿能显著减少到系统的综合阻抗,以取得提高送电容量的效益。但采用串联补偿也有一些特殊的问题。例如,如果采用串联补偿的补偿度较大,将使传统的作为基本保护的距离保护的正确动作发生困难,而不得不采取特殊措施;串联电容间隙非对称击穿,将影响零序电流保护的正确和有效动作;串联补偿站本身和对串联电容的保护也是特殊问题,近年来开发的氧化锌阀片用作串联电容的过电压保护,不但可以减化结构,还能比较好地充分发挥串联电容在故障切除后加强系统暂态稳定的作用;而如果在汽轮发电机组的高压配出线路上采用串联补偿,则必须研究和采取措施防止发生次同步谐振的可能性。
所谓次同步谐振,即当汽轮发电机接在经串联补偿的输电系统时,如果电系统的串联谐振额率Fe和发电机组轴系的某一扭振频率Fm对运行频率(例如50Hz)接近互补的话(Fe+Fm=60Hz),则电系统将与发电机组轴系机械系统间相互交换振荡能量,使振荡逐渐增大直至机组轴损坏。而对于水轮发电机组,由于水轮机的转动惯量远小于相联发电机的转动惯量,机械部分的反作用极小。因而不致发生次同步谐振问题。
其他的一次措施,比如中间并联补偿、增加开关站、增设线路,但都没有串补来的普遍。
3)提高暂态稳定水平的二次自动措施
实际工程中,二次措施在提高暂稳水平上,更为有效。
快速切除故障
系统的暂态稳定问题,主要出现在电厂的配出线上。而快速切除故障,则是提高线路暂态稳定性的最有效措施,它也是其他安全自动措施得以发挥作用的前提条件。
电力系统原理上,即快速切除故障,增大制动能量面积,增加系统暂态稳定性。

在一般的系统情况下,加速切除故障对提高极限送电功率水平的作用。随电网结构与电厂在系统中所处位置而异,但可以认为,它对于要求传输大功率的长距离线路,效果特别突出。我国电力系统的实践说明,有的系统仅加速了电厂出口附近的短路故障切除时间,就取得了保持三相短路后的暂态稳定性:有的系统在适当地加快故障切除时间的同时,取消了原来需要的电气制动,同样取得了良好的暂态稳定效果。对于弱受端系统(受端系统电源较少。联系比较松散),缩短输电线路的故障切除时间、更可以获得较大暂态稳定效益,某些情况下,你把故障切除时间从0.12S缩短到0.1s,可以代替切100MW负荷的效果。
所以故障极限切除时间,也是电力系统稳定相关工程中需要关注的内容。
在我国现有条件下。可能达到的最快故障切除时间是多少,近端故障的切除时间将不大于0.1s,而远端故障切除时间则为0.1s或0.12s。根据需要,还可以做到近端故障不超过0.08s。具体的故障切除时间,国网的工程要按照国家电网安全稳定技术规范里面规定的值来分析。
自动重合闸
自动重合闸的重要作用、不仅在于恢复因故障断开的线路,更是在连续故障情况下保持系统完整性、避免扩大事故的重要手段。1977年的第二次纽约大停电,是多回线连续故障引起的。在事故过程中,一问345kV电源线路因合闸角的整定过小(为了减少对1000MW机组的冲击)而拒绝自动重合闸与禁止手动合闸。否则,也许这次造成重大社会损失的系统大停电事故就可能避免,事后不久。就把该合闸角改大了。自动重合闸的一些问题:
1)合理选用重合闸时间:可以显著地提高重合于故障未消除线路上时的系统稳定性。具体分析还是和制动能量面积有关,教科书内容就不详述。不论是单相的或三相的重合闸,当重合到故障未消除的线路上时。将显著地减低系统的稳定水平,而采用最佳重合闸时间的单相或三相重合闸,即使重合到故障未消失的线路;对系统的稳定水平将不会有较大的恶劣影响。与不进行电合闸的情况基本相近。
分析结果说明,重合时间可以按最大送电功率情况考虑最佳条件整定。一般地说,传输重负荷时,初始角大,故障后的摇摆周期较长:而在同样的系统结构条件下,传输轻负荷时,初始角较小,故障切除后的摇摆周期变短。因而在较轻的传输负荷情况下,满足最佳重合时间的重合闸时间将变短。计算结果证实,即使在轻负荷时偏离最佳重合间较多,一般也无碍于系统的最终稳定。
2)220kV线路的重合闸方式:220kV网络较为紧密,一般采用三相重合闸方式,这种方式好处甚多,如重合闸装置本身简单可靠,继电保护的整定配合比较方便。发生接地故障时,一侧先跳开后,另一侧往往可能由零序电流保护相继快速切除故障,起到部分高频保护的作用等。实际系统中的大环网或重负荷单回线上,才宜于按需要整定单相或三相快速重合闸。
在这样特殊的电网结构与运行方式下,当线路发生单相或多相故障,如果任其断开而不进行重合闸。系统将失去稳定。而如果线路只是短时断开,依靠成功的快速重合闸使电网得以快速恢复原来的正常接线,则可能保持系统的暂态稳定。对于这种情况,采用重合时间满足需要的快速重合闸,当然是合理的。但如果重合到故障尚未消除的线路上、系统失去稳定则是无疑的,这时只好依靠后备措施来中止振荡、或者切机、切负荷等防止失去稳定。
3)500kV线路的重合闸方式:由于500kV线路传输的功率占系统容量的比重大。以及线路故障仍以单相瞬时故障占大多数,而保持这些线路安全运行的有效措施应是采用单相重合闸。和220kV线路不同,在500kV线路上采用单相重合闸必须考虑的一个重要问题是,故障点能否快速自灭弧(中性点小电抗)。
切机方案
保持电电力系统同步稳定性的最根本前提,在于保证线路的传输能力总是大于系统通过它传输的最大功率。所以线路发生故障引起传输能力不足时,必须切机,才有可能保持系统的继续稳定运行。
无论国内外系统,都已把水电厂切机作为常用的对付上述问题的一种有效手段,并早已取得成功的经验。而火电厂切机则未见广泛采用。
发挥切机的作用,另一关键问题是希望在故障发生后尽快可能加速切机时间,切得愈慢。效果愈差、等到其他机组已步入失稳边缘,再切机也无济于事了。为了加速切机时间,最好动作于动作快的机组变压器侧高压断路器,而不是低压侧慢动作的发电机断路器。另外,为了快速降低火电机组的功率,快关汽门是一个好办法。

合理调整系统运行接线
加强受端系统、适当分散外接电源,不但是建设一个安全稳定电网所需遵循的原则,在有条件而又需要的情况下,也不失为运行系统一种重要的稳定措施。
由远方电源送来主要电力的系统条件。这种系统运行接线的稳定问题,往往由于受端母线电压因缺少本地电源支持,在故障后系统的功率摇摆过程中,不能保持有较高水平;更可能在摇摆过程中受端母线电压因电压崩溃而不断下降,造成受端电源与外地电源间失步。在运行系统中改善这种不稳定现象的办法之一是,将受端系统中的停运机组改调相机运行,以增大受端母线短路电流水平,从而使受端母线能在摇摆过程保持较高电压。而更为有效的措施则是尽可能设法将远方电源分开,让这些电源支路直到受端系统母线处才并联运行。这样,当任一送电支路发生故障,其他的电源支路,都将作为受端系统电源对受端母线电压提供支持,保证受端电压得以处于较高水平,从而显著地提高系统的稳定性。
切集中负荷
切集中负菏,可以提高系统运行频率,可以减轻某些电源线路的过负荷、可以提高受端电压水平,因而都有利于系统的安全稳定运行。但是集中切负荷对用户的影响太大,而且由于远方控制可能带来的误操作,更加剧了它的副作用,因而使用时要慎重。减少和避免误切负荷的可行办法之一,是增加被切负荷的某种参量(例如电压降低)的就地判别监控,只有当本地的判别元件动作而又收到遥切命令时才执行。
快速励磁
快速励磁一直是一种提高暂态稳定的常用措施。在弱传输系统中、在规定的故障切除时间下。快速励磁对提高暂态稳定条件下的线路极限传输功率很有好处,具体效果视具体条件而定。采用快速励磁时,当配出线路发生短路故障后,可以立即给发电机转子回路提供极限励磁电压,在故障切除后,发电机的端电压可以很快得到恢复乃至短时超过额定值,即增大制动面积,从而提高了系统的暂态稳定,线路允许传送的极限功率得以增加。
但只有在极弱的联络线上传输较大功率时。快速励磁才能显出一定效果,比之于快速切除故障,快速励磁对暂态稳定效益不大的根本原因,在于它所能增加的制动面积的作用,很难和减少故障切除时间所取得的双重效果相比拟。
实际电网中,电力系统暂态稳定控制过程如下:
五、电力系统动态稳定
动态不稳定(不衰减的电磁振荡),在世界各国的其他电力系统中多次发生过。基本三种情况,即发电机组经长距离线路接入系统,弱联系的系统间及长链型结构的系统。
产生动态不稳定的根本原因,是系统的阻尼力矩为负。发生无论大或小的扰动引起的系统振荡,均因之而使振荡逐渐发散。或者引起系统间的解列,或者由于系统中某些参数的非线性而使振荡的幅值最终趋于某一定值。
国内外发生动态失稳的原因,经分析绝大多数都是由于电压调节系统的负阻尼效应。
在国内外系统中,当发生动态失稳时,往往事先没有准备,只得采取应急措施。实际采取的临时有效措施有如下三点。1)降低发电机有功输出,以减小配出线路或系统间联络线的传输功率(但也有过联络线传输功率极小时突然发生动态失稳的事例)2)提高发电机端电压。3)将电压调节器退出运行,或降低放大倍数等等。
而抑制动态失稳的最有效办法是在电压调节器的输入回路中引入能反应发电机转速变化的附加环节,并做到发电机端电压的变化能够与转速变化同相,以达到由励磁系统提供正阻尼力矩的最终要求。实际引入电压调节器的这个附加量,引入反应转速的这个电压调节器附加环节,在美国叫电力系统稳定器(PSS),在欧洲叫附加反馈(AF)。
动态稳定,其实是一个很好的研究方向。它包括:选择安装PSS的关健发电机位置;选择反应母线电压频率或转子转速,或输出功率作为PSS装置的信号栩入,以及确定主导的振荡频率与PSS回路参数的合理选择等等,都有许多学问可做。但实际发生的动态失稳事故,却往往难予预计。
六、电力系统频率稳定
频率反应了电力系统中有功功率供需平衡的基本状态。
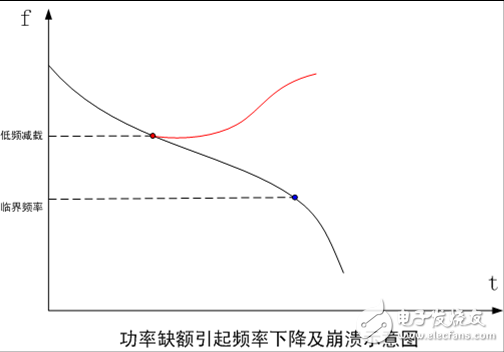
电力系统运行频率偏离额定值过多,会给电力用户带来不利影响,而受影响最大的,当首推发电厂本身,当供电频率下降时,从而使发电机输出的电功率减少,更加剧了供需间的不平衡,进一步促使频率下降,甚至造成发电厂全停。
主要写的是低频减载方面的内容。
1)低频减载准则
在电力系统中,必须配置按频率降低自动减负荷装置,使保留运行的负荷容量能随时与运行中的发电容量相适应,以保证在突然发生有功功率缺额后,能迅走使系统频率恢复到接近倾定值。设计与整定按频率降低自动减负荷的准则,主要考虑如下:
如果没有特殊要求,一般宜限制下降到低于某一低频值(例如47Hz)的时间在任何情况下都不大于某一规定时间(例如0.5s)
在任何可能情况下的频率下降过程中,应保证系统低频率值与所经历的时间,能和大机组的低频保护相配合,保证这些大机组继续联网运行,避免事故进一步恶化。
因负荷过切引起的系统频率过调,最大不得超过某一定值,例如51HZ,避免引起系统中大型机组的过频率保护跳闸。这点实际发生过很多切负荷过频事故。(过频这时就要自动切机了)
2)小系统失去大电源
小系统失去大电源有两种小系统失去大电源的情况。一种是终端系统由主系统供应相当大比重的电源,另一种是新建立的电网,小系统装大容量机组。当失去主系统电源或大机组时,系统的有功功率缺额可能大到50%以上乃至百分之数百。这是一种特别严重的情况。我国的运行经验证实,当有功功率缺额过大时,在发生频率崩溃的同时,还可能发生电压崩溃,甚至电压崩溃快于频率崩溃,出现电压全面降低,运行机组全面过电流而系统频率下降并不突出严重的现象。显然,在这样的特殊电网条件下,对付如此大有功功率缺额的办法。不能再是一般的低频减负荷。实践经验说明,正确处理这种事故的办法,是按照预先安排好随时准备着的电网运行接线(例如安排好电源与负荷相适应的解列母线),当失去主电源大机组的同时,自动或联锁切除相适应的集中负荷。
频率稳定这块确实涉及不多,所以内容也不够丰富。
七、电力系统电压稳定
电压稳定这块比较复杂,很多东西也没有定论,所以自己对这块也只是略知一二。
很多在之前的无功补偿和电压调整里面提到过,主要写些其余的东西。
导则里将电压稳定定义为:电力系统受到小的扰动或大的扰动后,系统能保持或恢复到容许的范围内,不发生电压崩溃的能力。这样来说,电压稳定也分静态、暂态和动态三方面。具体意思和前述功角的差不多。
全球范围内,大部分大停电事故发展到某个阶段,都由于引起了电压崩溃问题,然后导致严重后果,其核心问题,还是无功不足,具体还是以下:
重负荷运行状态下系统负荷持续增加,系统运行备用(特别是无功)紧张,传输线潮流接近最大功率极限。
大的突然扰动,如失去发电机组、输电线相继跳闸等。?有载调压变压器ULTC负调压作用。
发电机过励限制器OEL。
继电保护、低频减载等缺乏协调是导致电压不稳定的一个重要原因。
弱连接的交直流系统。
电压崩溃通常显示为慢电压衰减,这是由于许多电压控制设备和保护系统作用及其相互作用积累的结果。在许多情况下,电压不稳定和转子角不稳定是相互耦合的。
科研学术中很多理论运用于电压稳定研究中,比如分叉理论,但是实际工程中,还是一些比较普遍的方法。
首先是静态分析法,主要是计算一些指标,结合QV曲线来分析电压的安全稳定裕度。比如灵敏度法,dQ/dV节点判据等,一般可根据软件潮流计算,并结合一定指标分析电压静态安全稳定。
至于动态分析法,电压稳定从本质上而言是一个动态问题,比较典型的有时域仿真法。电压的暂态稳定和功角稳定处于一个时间框架;至于动态稳定则持续较长时间,国际上发生的一些事故都属于此类。
举一个例子:大型发电机组跳闸,接着一条500KV重要线路跳开。
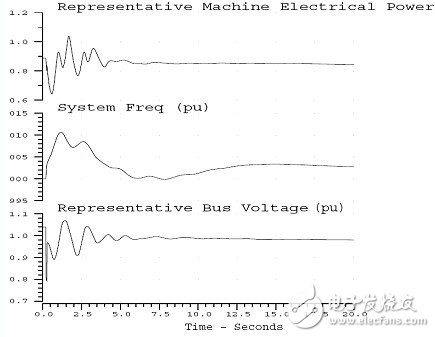
暂态分析看出:事故后20s内,频率和电压经过摇摆后稳定;电压有所下降。系统显现了比较乐观的响应。
动态分析来看,是一个长期的时间框架,考虑负荷,发电机,ULTC,励磁保护,AGC,气机等。模拟下比较坏的情况:
调速器动作,增加发电功率(有差调节)―――AGC作用,全网功率再调度―――加重了电网的压力(原因:按经济调度的原则,而不是按最合适的地点。这样,有些线路可能压力加大);
电压下降导致负荷功率下降(考虑负荷电压静特性)―――功率过剩―――频率升高―――AGC作用,降低发电功率。
80s后,一些达到无功极限的发电机的OEL动作,使Qlimit致Qnominal―――进一步电压水平下降。其它发电机增加无功输出。
120s后,负荷动态和ULTC二者动态结合导致系统电压下降―――被AGC进一步被加剧(AGC减少发电功率以降低频率,而降低发电功率的发电机正好位于负荷中心―-相当于负荷过重,需要无功支持加大―――电压下降;)
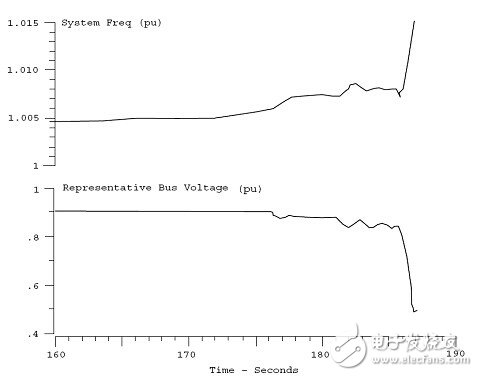
160s后,另外一些发电机由于OEL作用而使Qlimit致Qnominal,减少无功输出,加大了和加速了电压下降―――发电机失步,低压保护而失去一些发电机。
电压崩溃,频率失稳。
功角不稳定和电压不稳定经常同时发生,一种形式的不稳定可导致另一种形式的不稳定。提高电压稳定性的控制措施主要有发电机无功控制(励磁控制)、低电压切负荷、静止补偿设备(SVC、STATCOM)等,低电压切负荷措施是电压紧急控制最基本而有效的措施。对于复杂电网,仅靠分散安装的低压切负荷装置往往不能有效解决电压稳定问题,需要配置多个厂站的电压稳定控制系统,根据多个相关站点的电压水平及系统的运行状态(包括故障)来进行决策。
八、失稳对策
所有国内外重大系统事故的产生,几乎都是由系统失去稳定而扩大,因无预定对策,而后发展为灾害性后果的。长期的运行实践证实。不管对系统稳定性的要求如何严格、措施如何完善,总可能因一些事先不可预计的各种偶然因素叠加,产生稳定破坏事故。而过份提高对系统稳定性的要求。需要大量的投资。一个较弱而有措施准备的系统,会比较强而无措施准备的系统有更好的运行效果。
当主系统发生隐定破坏后,关键问题在于如何能合理而快速地平息振荡,和最快地使系统恢复正常。将振荡着的两侧系统解列,可以平息振荡,但要在失去同步的系统中实现合理的解列,必须满足两个基本条件:1)解列后的两侧系统必须各自能保持同步运行;2)解列后两侧系统的有功无功供需能够基本平衡。很明显,不同时满足这两个条件的解列,只能给系统带来更大的混乱,必然以长时间大面积停电而告终,这是国外和国内都不止一次出现过的情况。
故障下选择性解列,或者保持系统的完整性,一直是业内讨论的问题,没有定论。
我国系统长期的运行实践说明,对付系统振荡的有效办法,是在系统振荡时尽可能保持整个主系统的完整性,不因振荡而使线路及机组乱解列,同时对送端电厂即时压出力,就可以快速平息振荡,因位于振荡中心附近而甩掉的部分负荷也可以因此而快速恢复供电,从而恢复系统的正常运行。
平息系统振荡的有效措施,是压送端机组出力,增加受端机组出力,使系统中机组逐渐按同一平均频率运行。在一个复杂系统中,在不同的事故情况下,一个电厂所处的送受端位置可能变化。压错了实际位与受端的水电机组出力而使振荡加剧的情况,在我国,不只在一个系统中发生过,因而延长了平息振荡的时间。因此,需要用自动装置来判别。
系统持续振荡。在接近振荡中心的部分负荷会因电压的周期性严重降低而自动或手动地被切除。但是,只要系统结构完整,机组保留运行,一当振荡平息时,这些被切掉的负荷就可以迅速地恢复供电,这比之于系统全停后的负荷恢复,结果当然更好。
另一个问题,系统持续振荡对大型发电机组有何严重影响。要求振荡时机组不解列,作短时间失步运行,特别对大型汽轮发电机组说来,能否造成严重的后果?
CIGRE的结论为:从兼顾系统安全与机组安全,建议:可以允许汽轮发电机在一定条件下作短时间的失步运行。这个条件可以简要地按在失步过程中振荡中心是否多次落入发电机升压变压器乃至发电机本身为标准,允许的振荡次数可考虑订为20次跳闸。
最后一点就是关于系统解列点的,是否需要与如何形成准全国性质的统一电网,安排解列点是其中需要认真研究的一个重要问题。失步解列是电网第三道防线的重要组成部分。
关于解列点的选择:目标是在预定的解列点将电网解列后系统失步振荡现象被消除,电网的解列点应尽量选在网间联络线。系统解列后形成送端与受端两部分电网,各部分电网内的功率一般不可能平衡,送端电网通过切机、减出力,受端电网通过切负荷措施可保持各部分电网的频率或电压的稳定性。在解列点选择时应尽量把带负荷的变电站或本站的负荷留在送端电网一侧。
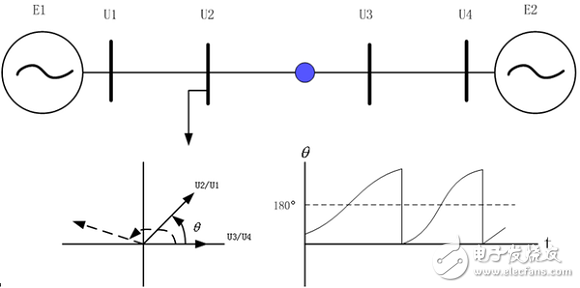
最佳的解列时刻:系统发生失后应尽快将电网解列,但判断系统失步的判据是系统送受端两个等值机的功角摆过180度,因此最快的解列时刻是功角过180度那一时刻(联络线两侧母线电压相位差也是180度)。
至于失步解列判据,相对比较理论,而且很多方法无法统一,一般采用振荡中心两侧母线电压相量直接比相原理,当两侧母线电压相位差轨迹超过180度时认为系统失去同步,且振荡中心在两个母线之间。
除了上述综合解列之外,低压解列也是三道防线的组成部分,暂稳问题发生后,如没有稳定控制措施或稳控拒动,系统的暂稳问题就会转变为电压稳定问题。此时由于电压下降速度太快,常规的低压切负荷装置及低压解列装置可能因dU/dt过大而被闭锁;而系统的功角又没有摆开,即不会出现失步振荡的特征,常规的失步解列装置也动作不了,系统面临电压崩溃。设置专用的低压解列装置可解决上述问题;系统解列后电压稳定问题消失转为送受端电网的频率稳定问题,处理起来相对简单的多。
九、全停后系统恢复
作为电力系统安全措施的最后一条,是准备如果发生系统全部停电或者发生大面积停电的重大事故后,如何能够快速恢复系统和对广大用户的供电。在现代电力系统中,都制订了适合本系统情况的全停后的系统恢复方案。
不同的电力系统有不同的具体特点,但在恢复系统的过程中,都有一些共性问题。
1)起动电源。在分区进行恢复的某个区域内,都必须有起动电源。水电机组用作起动电源最为方便。可能的问题是如果机组容量较小,又经长距离高压线路接入系统时,可能产生自励傲或末端电压过高,但如果能事先接入某些负菏,一般的过电压问题题都可能得到缓解。火电机组也应当能作为起动电源,问题是要具有热态再起动的能力。而关健在于把握好某些允许的时间间隔。
2)无功功率平衡。在超高压电网的恢复过程中,无功功率平衡是一个严重问题。一般说来,有两种可能的恢复电网的做法:一种做法是避开线路充电和电压问题,按系统发展过程的相同顺序恢复系统,将超高压电网置于最后恢复。但这种做法的明显缺点是相当程度地延长了整个的恢复时间。另一种做法是先恢复超高压电网,优点是可以加速系统的恢复,但必须对操作顺序进行细致安排。例如在超高压线路充电前:①先安排接入一定容量(最好是低功率因数)的负荷;②将并联电抗器先接入线路;③断开静电电容器;④将发电机端电压置于厂用电允许的最低电压值同时将自动电压调节器投入运行并将变压器电压抽头先调到合适位置等等。实施这些步序,能否保证安全,不发生过电压问题,当然需要事先的仔细研究分析。
3)有功功率平衡。为了使起动电源能在最低负荷水平下稳定运行和保持网络电压有合适的水平,一开始往往需要及时适当地接通一定容量的负荷,但又只能少量增加负荷,以保持运行频率在合理的允许范围内。因此,一般往往首先适于恢复较小的直配负荷,而后逐步地带较大的直配负荷与电网负荷。受按频率降低自功减负荷控制的负荷,理应只在最后阶段恢复。国外几个电力系统的经验数据为负荷量不大于发电量的5%即可满足要求。
十、系统稳定对继电保护的要求
这里讲的继电保护应包括保护装置与相关的通道、二次回路。
1)在被保护的元件没有故障或故障发生在区外时应不误动作。
由于通道接受与发送时延的不一致引起的光纤纵差保护误动、由于交流串入直流电源回路引起保护及远跳装置误动、由于线路过载引起的距离三段误动作等事故国内近几年仍多次发生,有的诱发了大范围停电事故。
2)在被保护的元件区内发生故障时应不拒动。
由于直流电源消失引起保护拒动导致大范围停电事故国内多次发生,如:05年“9.26”海南大停电事故;07年“10.27”上午10:10上海徐汇区220千伏长春变电站停电事故(造成上海徐家汇、田林、龙华等地区停电,居民、商户用电受到影响,地铁1、2、4号线部分区段失电)等。保护装置实现了双重化,但向保护供电的直流电源等回路如果不双重化保护的可靠性又如何保证。
3)在系统发生异步振荡期间保护装置应可靠闭锁。
国内保护这一问题解决得较好,但国外保护这方面问题较大,03年的“8.14”等大事故中在系统振荡过程中时保护无选择的动作,使系统事故扩大。
4)110kV电压等级以上的线路不应配置过负荷跳闸保护,距离三段定置应躲过该线路可能出现的严重过负荷情况。
5)对于最高电压等级为110kV的省级电网(西藏等),重要输电线路的主保护应考虑双重化配置,并应设置断路器失灵保护。
6)低压保护装置中不宜兼管低频、低压减载功能。继电保护与安全自动装置应各司其职,分工明确,管好自己分内的事就很好了。
7)远后备保护的长延时和无选择性问题。某些电网提出利用区域电网的信息构建“网路保护”、“广域保护”,试图解决远后备的配合问题和无选择性问题,目前一般仅局限于110kV以下的电网,采取的方法类似于安全稳定控制系统的思路。
最后总体来说,目前电网现况中的稳定问题还是很多的:主要是:
安全稳定控制系统在提高电网输送能力、防止大事故方面发挥着重要的作用,但稳控装置/系统标准化不够,一些电网稳控系统软件过于复杂,测试手段不完善,装置误动导致的切机切负荷事故近期时有发生。
电网互联后系统的动态稳定问题突出了,但目前的仿真手段还不能正确分析和再现所发生的事故,因而诱发低频振荡的真正原因往往还不清楚,低频振荡几乎每年都有发生,至今我们还没有有效的手段来预测和彻底避免。
电压稳定问题已成为电网安全的一大潜在问题,失去大电源、事故过程中潮流大转移、主保护拒动及开关失灵、稳控系统拒动等,都有可能会导致电压崩溃事故。
稳定这块先就这么多,以后会有完善。其实实际工程中主要是仿真计算,梳理一遍体系也清楚了不少,实际工程中稳定计算必须结合电网网架分析,运行方式分析以及一些规程规范,再发现问题提出解决措施,至于结合保护的一些东西就更复杂了,这样是一些复杂的安稳专题的难度所在。
- 相关推荐
- 智能电网
-
电力系统谐波及滤波技术论文2009-01-13 0
-
浅谈电力系统中的时钟同步技术2012-10-18 0
-
基于Matpower的电力系统潮流计算设计原理是什么2021-06-30 0
-
基于Matlab的电力系统潮流计算2021-07-06 0
-
摄动法及其在电力系统中的应用2021-08-31 0
-
电力系统结构分析2021-09-09 0
-
电力系统中的电压稳定性介绍2023-04-21 0
-
特高压和智能电网环境下电力系统稳定控制装置的设计与测试2011-11-23 672
-
电网电力系统继电保护原理2017-01-17 860
-
10kv电力系统配电网智能化2018-02-06 849
-
智能电网在电力系统的应用2023-04-03 1692
-
智能电网和智能电力系统的区别2023-04-11 2040
-
智能电网的建设对电力系统的影响2023-05-26 1085
-
电力系统稳定性包括哪些方面?2023-09-27 4607
-
电力系统中变压器如何保证电力系统的稳定性?2023-11-23 1440
全部0条评论

快来发表一下你的评论吧 !
