

单片机关键技术基础详解(五)
控制/MCU
描述
单片机被广泛应用于工业控制,家电,消费电子,医疗电子,仪表测量等领域,为应广大初级电子工程师/单片机爱好者之需,电子发烧友网隆重策划整合推出《单片机关键技术基础详解》系列技术文章,以后会陆续推出其他章节,敬请广大工程师朋友继续关注和留意。应广大工程师网友对前面章节热烈反响,电子发烧友网会再接再厉为各位工程师网友推出更多技术精品系列文章,以飨读者。
参阅相关系列章节
一、单片机矩阵键盘原理与结构
矩阵式结构的键盘识别要复杂一些,列线通过电阻接正电源,并将行线所接的单片机的I/O口作为输出端,而列线所接的I/O口则作为输入。这样,当按键没有按下时,所有的输入端都是高电平,代表无键按下。行线输出是低电平,一旦有键按下,则输入线就会被拉低,这样,通过读入输入线的状态就可得知是否有键按下了。
在矩阵式键盘中,每条水平线和垂直线在交叉处不直接连通,而是通过一个按键加以连接。这样,一个端口(如P1口)就可以构成4*4=16个按键,比之直接将端口线用于键盘多出了一倍,而且线数越多,区别越明显,比如再多加一条线就可以构成20键的键盘,而直接用端口线则只能多出一键(9键)。由此可见,在需要的键数比较多时,采用矩阵法来做键盘是合理的。
《1》确定矩阵式键盘上何键被按下介绍一种“行扫描法”。
行扫描法 行扫描法又称为逐行(或列)扫描查询法,是一种最常用的按键识别方法,如上图所示键盘,介绍过程如下。
1、判断键盘中有无键按下 将全部行线Y0-Y3置低电平,然后检测列线的状态。只要有一列的电平为低,则表示键盘中有键被按下,而且闭合的键位于低电平线与4根行线相交叉的4个按键之中。若所有列线均为高电平,则键盘中无键按下。
2、判断闭合键所在的位置 在确认有键按下后,即可进入确定具体闭合键的过程。其方法是:依次将行线置为低电平,即在置某根行线为低电平时,其它线为高电平。在确定某根行线位置为低电平后,再逐行检测各列线的电平状态。若某列为低,则该列线与置为低电平的行线交叉处的按键就是闭合的按键。
《2》确定矩阵式键盘上何键被按下介绍一种“高低电平翻转法”。
首先让P1口高四位为1,低四位为0,。若有按键按下,则高四位中会有一个1翻转为0,低四位不会变,此时即可确定被按下的键的行位置。
然后让P1口高四位为0,低四位为1,。若有按键按下,则低四位中会有一个1翻转为0,高四位不会变,此时即可确定被按下的键的列位置。
最后将上述两者进行或运算即可确定被按下的键的位置。
更多矩阵键盘的资料请访问http://www.elecfans.com/zhuanti/20111025226587.html
二、什么是格雷码
格雷码(Gray code),又叫循环二进制码或反射二进制码 在数字系统中只能识别0和1,各种数据要转换为二进制代码才能进行处理,格雷码是一种无权码,采用绝对编码方式,典型格雷码是一种具有反射特性和循环特性的单步自补码,它的循环、单步特性消除了随机取数时出现重大误差的可能,它的反射、自补特性使得求反非常方便。格雷码属于可靠性编码,是一种错误最小化的编码方式
简介
因为,自然二进制码可以直接由数/模转换器转换成模拟信号,但某些情况,例如从十进制的3转换成4时二进制码的每一位都要变,使数字威廉希尔官方网站 产生很大的尖峰电流脉冲。而格雷码则没有这一缺点,它是一种数字排序系统,其中的所有相邻整数在它们的数字表示中只有一个数字不同。它在任意两个相邻的数之间转换时,只有一个数位发生变化。它大大地减少了由一个状态到下一个状态时逻辑的混淆。另外由于最大数与最小数之间也仅一个数不同,故通常又叫格雷反射码或循环码。
2、格雷码对照表

下表为几种自然二进制码与格雷码的对照表:
一般的,普通二进制码与格雷码可以按以下方法互相转换:
二进制码-》格雷码(编码):从最右边一位起,依次将每一位与左边一位异或(XOR),作为对应格雷码该位的值,最左边一位不变(相当于左边是0);
格雷码-〉二进制码(解码):从左边第二位起,将每位与左边一位解码后的值异或,作为该位解码后的值(最左边一位依然不变)。
数学(计算机)描述:
原码:p[n:0];格雷码:c[n:0](n∈N);编码:c=G(p);解码:p=F(c);
书写时按从左向右标号依次减小,即MSB-》LSB,编解码也按此顺序进行
编码:
。..。..。..。..。..。...c[n]=p[n],
。..。..。..。..。..。...c[i]=p[i] XOR p[i+1] (i∈N,n-1≥i≥0);
解码:
。..。..。..。..。..。...p[n]=c[n],
。..。..。..。..。..。...P[i]=c[i] XOR p[i+1] (i∈N, n-1≥i≥0)。
Gray Code是由贝尔实验室的Frank Gray在20世纪40年代提出的(是1880年由法国工程师Jean-Maurice-Emlle
Baudot发明的),用来在使用PCM(Pusle Code Modulation)方法传送讯号时避免出错,并于1953年3月17日取得美国专利。由定义可知,Gray Code的编码方式不是唯一的,这里讨论的是最常用的一种。
用异或乘除法实现二进制码与格雷码互相转换
如果在二进制运算中忽略进位、退位,那么加减运算都变成了异或(XOR)。
用异或代替加减进行二进制竖式乘除,称为异或乘除,它的特点是无进退位。
由于没有退位,异或除法将变得更像多项式除法。
如:10101除以11将变成1100余1,而不是111。
二进制转格雷码:
只要异或乘以二分之三,即二进制的1.1,然后忽略小数部分;也可以理解成异或乘以三(即11),再右移一位。
格雷码转二进制:
异或乘以三分之二,即除以1.1,忽略余数;或者左移一位,再异或除以三,忽略余数。
格雷码转二进制方法
二进位码第n位 = 二进位码第(n+1)位+格雷码第n位。因为二进位码和格雷码皆有相同位数,所以二进位码可从最高位的左边位元取0,以进行计算。(注:遇到1+1时结果视为0)
例如: 格雷码0111,为4位数,所以其所转为之二进位码也必为4位数,因此可取转成之二进位码第五位为0,即0 b3 b2 b1 b0。
0+0=0,所以b3=0
0+1=1,所以b2=1
1+1取0,所以b1=0
0+1取1,所以b0=1
因此所转换为之二进位码为0101
格雷码转换快速方法
(假设以二进制为0的值做为格雷码的0)
G:格雷码 B:二进位码
G(N) = B(n+1) XOR B(n)



三、AVR单片机开发经验
AVR与传统类型的单片机相比,除了必须能实现原来的一些基本的功能,其在结构体系、功能部件、性能和可靠性等多方面有很大的提高和改善。
但使用更好的器件只是为设计实现一个好的系统创造了一个好的基础和可能性,如果还采用和沿袭以前传统的硬件和软件设计思想和方法的话,是不能用好AVR的,甚至也不能真正的了解AVR的特点和长处。
功能越好的器件,需要具备更高技术和能力的人来使用和驾驭它。就象一部好的F1赛车,只有具备高超技术的驾驶员才能充分体会到车的特点,并能最大限度的发挥出车的性能。
AVR具有上手入门快,开发方便简单的特点,但要充分体会和发挥AVR的优点,还需要应用工程师本身的硬软件设计开发能力的不断学习、实践提高。
“外行看热闹,内行看门道”,对于有一定基础的嵌入式和单片机系统设计开发的工程师,不妨先简单尝试一下AVR。
开发环境与工具:PC+下载线+实际的系统板
PC上的开发软件:
AVR Studio(Free)汇编+汇编调试+高级语言调试+软件仿真
ICC、CVAVR、BASCOM-AVR 高级语言程序开发+程序下载。其中一个购买正版全功能,作为主要的开发环境,其它使用DEMO版,作为辅助及参考。
AVR ISP下载线:
STK200 And STK200+ And STK300 ISP Programmer。通过PC的打印机口,采用ISP技术将系统运行代码(HEX、BIN)和数据写入AVR芯片的Flash和EEProm中,编程AVR的配置熔丝位和加密位。支持决大多数的AVR芯片、以及ATMEL的51兼容芯片89S8252、89S52等。在ICC、CVAVR、BASCOM-AVR、BASCOM-8051中都内含对该下载线的支持程序。免费专用的下载程序:SLISP、PonyProg2000等。
尽量不使用仿真器的建议:
在开发和调试系统程序时,有许多人完全依赖于仿真器,一旦离开了仿真器时就感觉无从下手。其实,由于AVR的Flash存贮器可方便的使用ISP技术在线的多次擦写,因此建议尽量不使用(依赖)仿真器来开发和调试程序。
在实际开发过程中,程序的调试可以从下几方面入手:
现在的高级语言编译器(如C编译器)可以产生效率很高的机器代码,因此建议大家尽量使用高级语言编写系统程序。
使用Atmel公司提供AVR Studio软件模拟仿真环境,以及其他的软件模拟仿真环境(BASCOM-AVR)。
尽可能使用高级语言编写系统程序。
利用目标板上的LED、LCD或异步串口。见附件“没有仿真器的情况下如何开发AVR”的介绍。
提高硬件设计的合理性:
尽量合理和充分使用AVR片内的资源,如EEPROM、A/D、内部的RC振荡源。
尽量采用串口通信连接的外围器件,大容量的存储器、LCD控制器、打印机、不用8279(LED数码管+键盘)而使用7279等。除了必须外扩RAM(如语音和图象),一般不提倡使用并行扩展(573+译码威廉希尔官方网站 ),减小硬件和连线以及PCB板上错误的出现概率,同时也提高了系统的可靠性。并行扩展向串行扩展是发展趋势。现在有大量的新的外围器件采用高速的串行接口,如A/D、D/A、RTC、存储器等。
尽量使用以及在目标板上预留ISP程序下载接口,或使用IAP技术。
优点:ISP接口与I/O的兼容性比JETAG好。
缺点:不能在线调试
注意和掌握AVR配置熔丝位的使用:
。 系统晶振的选择
.BOD的使用
。启动延时.Mega8的PC6引脚,RESET与通用I/O的转换
.JETAG接口和通用I/O的转换
。启动向量的转换,BOOT-LOAT区大小的设置
提高硬件可靠性的考虑:
。尽量采用片内晶体、采用低频率的系统时钟、振荡威廉希尔官方网站 的输出小幅度。
。选择合适的启动延时参数
。使用BOD、片内的看门狗
。合理休眠方式的使用
。不用I/O口设定输出低电平
。利用内部的EEProm和寄存器MCUCSR判断复位标志,进行不同的处理
提高软件设计的能力和水平:
尽量合理采用高级语言设计编写系统程序。有许多人认为使用汇编写程序比较精简,而用高级语言开发会浪费很多程序空间,其实这是一种误解。对一个有经验的,而且非常熟悉某种单片机的汇编高手而言,他是能写出比高级语言更精简的代码。而对汇编不是很熟的开发者、或突然更换了一种新的单片机,您能保证一定可以写出比高级语言更简练的代码吗?
高级语言的优越性是汇编语言不能比的:
。程序移植方便
。程序的坚固性
。数学运算的支持
。条理清晰的结构化编程,程序的可维护性。
。可协同开发软件,开发周期短。
现在的高级语言编译器(如C编译器)已可以产生代码效率很高的机器代码,因此建议大家能用高级语言实现的程序尽可能使用高级语言写,在对速度和时序要求特严的场合可以采用混合编程的方法来解决。
更深入和全面的掌握各种串行通信协议的规程:
嵌入式系统目前以大量的使用串行接口外围芯片和各种通信接口,如RS232、两线(I2C)、三线(SPI)、单总线、USB、CAN、TCP/IP等。开发人员和程序员应了解低层协议,熟悉硬件怎样和如何实现低层协议,如何定义可靠的上层应用协议,以及低层协议驱动同上层应用协议之间的接口设计(中间层软件的实现)等。
硬件工程师的软件编写能力要提高,采用标准程序编写方式、完善的软件整体框架的设计、良好的数据结构和程序结构系统。(计算机软件专业的程序设计员对硬件不熟悉、大部分是在操作系统支持下编写软件,对低层接口和协议的驱动层以及接口也不了解,往往也编写不出好的单片机系统程序。)
通信接口的编写应尽量
。采用中断+缓冲区,
。分层+结构化设计,
。尽量不使用轮循方式(降低AVR的效率)。参见URAT(RS232)驱动+中间层软件示例。
采用好的系统设计模式:
尽量不使用传统的前后台(中断)系统设计模式,任务之间相互影响和干扰,无法定时操作。如设计一个采用动态扫描方式驱动的8位LED数码管显示+动态扫描的4*4矩阵键盘。
采用TimeTip+状态机设计+CASE结构,实现多任务并行运行系统设计方法。或时间触发式的系统设计。(见:《时间触发嵌入式系统设计模式》中国电力出版社 2004.6)
移植小型嵌入式操作系统,如UCOS-II。在网上有些免费的基于AVR的简洁的操作系统。
提高C语言的编程能力和软件应用水平:
熟悉和用好C中的数据结构体、指针应用、内存管理等较高级的应用。
熟悉和了解你所使用的高级语言开发平台的特点。这些平台是针对某一类处理器的,包含许多特殊的不兼容的语句和扩展的结构、语句、函数等。尽管使用方便,但由于其不透明性和时间的不确定性,因此要合理使用。如C中的Getchar()、Putchar()等。AVR有多个开发平台,每个都有其特点和不足。能够综合使用这些平台,相互互补,能够提高开发效率。如通过ICC、CVAVR的程序生成器CodeWizard学习和了解AVR的硬件设置,简化计算,快速的生成程序基本模块,如“一个URAT(RS232)低层驱动+中间层软件示例”。
四、AVR单片机定时器输出PWM的设计及注意问题
一、定时/计数器PWM设计要点
根据PWM的特点,在使用ATmega128的定时/计数器设计输出PWM时应注意以下几点:
1.首先应根据实际的情况,确定需要输出的PWM频率范围,这个频率与控制的对象有关。如输出PWM波用于控制灯的亮度,由于人眼不能分辨42Hz以上的频率,所以PWM的频率应高于42Hz,否则人眼会察觉到灯的闪烁。
2.然后根据需要PWM的频率范围确定ATmega128定时/计数器的PWM工作方式。AVR定时/计数器的PWM模式可以分成快速PWM和频率(相位)调整PWM两大类。
3.快速PWM可以的到比较高频率的PWM输出,但占空比的调节精度稍微差一些。此时计数器仅工作在单程正向计数方式,计数器的上限值决定PWM的频率,而比较匹配寄存器的值决定了占空比的大小。PWM频率的计算公式为:
PWM频率 = 系统时钟频率/(分频系数*(1+计数器上限值))
4.快速PWM模式适合要求输出PWM频率较高,但频率固定,占空比调节精度要求不高的应用。
5.频率(相位)调整PWM模式的占空比调节精度高,但输出频率比较低,因为此时计数器仅工作在双向计数方式。同样计数器的上限值决定了PWM的频率,比较匹配寄存器的值决定了占空比的大小。PWM频率的计算公式为:
PWM频率 = 系统时钟频率/(分频系数*2*计数器上限值))
6.相位调整PWM模式适合要求输出PWM频率较低,但频率固定,占空比调节精度要求高的应用。当调整占空比时,PWM的相位也相应的跟着变化(Phase Correct)。
7.频率和相位调整PWM模式适合要求输出PWM频率较低,输出频率需要变化,占空比调节精度要求高的应用。此时应注意:不仅调整占空比时,PWM的相位会相应的跟着变化;而一但改变计数器上限值,即改变PWM的输出频率时,会使PWM的占空比和相位都相应的跟着变化(Phase And Frequency Correct)。
8.在PWM方式中,计数器的上限值有固定的0xFF(8位T/C);0xFF、0x1FF、0x3FF(16位T/C)。或由用户设定的0x0000-0xFFFF,设定值在16位T/C的ICP或OCRA寄存器中。而比较匹配寄存器的值与计数器上限值之比即为占空比。
二、 PWM应用参考设计
下面给出一个设计示例,在示例中使用PWM方式来产生一个1KHz左右的正弦波,幅度为0-Vcc/2。
首先按照下面的公式建立一个正弦波样本表,样本表将一个正弦波周期分为128个点,每点按7位量化(127对应最高幅值Vcc/2):
F(X) = 64 + 63 * Sin(2πx/180) X∈[0…127]
如果在一个正弦波周期中采用128个样点,那么对应1KHz的正弦波PWM的频率为128KHz。实际上,按照采样频率至少为信号频率的2倍的取样定理来计算,PWM的频率的理论值为2KHz即可。考虑尽量提高PWM的输出精度,实际设计使用PWM的频率为16KHz,即一个正弦波周期(1KHz)中输出16个正弦波样本值。这意味着在128点的正弦波样本表中,每隔8点取出一点作为PWM的输出。
程序中使用ATmega128的8位T/C0,工作模式为相位调整PWM模式输出,系统时钟为8MHz,分频系数为1,其可以产生最高PWM频率为: 8000000Hz / 510 = 15686Hz。每16次输出构成一个周期正弦波,正弦波的频率为980.4Hz。PWM由OC0(PB4)引脚输出。参考程序如下(ICCAVR)。
//ICC-AVR Application Builder : 2004-08
// Target : M128
// Crystal: 8.0000Mhz
#Include
#Include
#Pragma Data:code
// 128点正弦波样本表
Const Unsigned Char Auc_SinParam[128] = {
64,67,70,73,76,79,82,85,88,91,94,96,99,102,104,106,109,111,113,115,117,118,120,121,
123,124,125,126,126,127,127,127,127,127,127,127,126,126,125,124,123,121,120,118,
117,115,113,111,109,106,104,102,99,96,94,91,88,85,82,79,76,73,70,67,64,60,57,54,51,48,
45,42,39,36,33,31,28,25,23,21,18,16,14,12,10,9,7,6,4,3,2,1,1,0,0,0,0,0,0,0,1,1,2,3,4,6,
7,9,10,12,14,16,18,21,23,25,28,31,33,36,39,42,45,48,51,54,57,60};
#Pragma Data:data
Unsigned Char X_SW = 8,X_LUT = 0;
#Pragma Interrupt_handler Timer0_ovf_isr:17
Void Timer0_ovf_isr(Void)
{
X_LUT += X_SW; // 新样点指针
If (X_LUT 》 127) X_LUT -= 128; // 样点指针调整
OCR0 = Auc_SinParam[X_LUT]; // 取样点指针到比较匹配寄存器
}
Void Main(Void)
{
DDRB |= 0x10; // PB4(OC0)输出
TCCR0 = 0x71; // 相位调整PWM模式,分频系数=1,正向控制OC0
TIMSK = 0x01; // T/C0溢出中断允许
SEI(); // 使能全局中断
While(1)
{……};
}
每次计数器溢出中断的服务中取出一个正弦波的样点值到比较匹配寄存器中,用于调整下一个PWM的脉冲宽度,这样在PB4引脚上输出了按正弦波调制的PWM方波。当PB4的输出通过一个低通滤波器后,便得到一个980.4Hz的正弦波了。如要得到更精确的1KHz的正弦波,可使用定时/计数器T/C1,选择工作模式10,设置ICR1=250为计数器的上限值。
五、C51单片机矩阵键盘扫描去抖程序
这段有1个C51的项目,用的是新华龙的C51 F020单片机。项目中要使成为事实4*5的矩阵键盘。矩阵威廉希尔官方网站 图如次如示
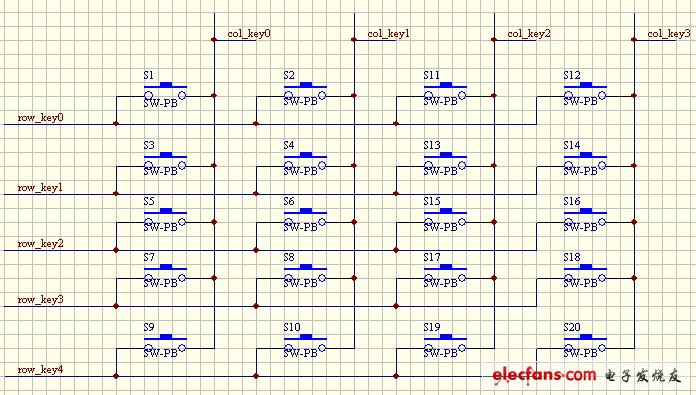
此中,四条列线接在 F020的P2~P5口线上,5条行线接在P5口线上(F020的P5口是差别于平凡C51的扩大接口,不克不及位寻址)。同时4条列线接在一四输入与非门(74LS20)上,门输出接F020的外间断1,如许,不论什么一键按下,都会孕育发生间断,报信程序举行键盘电子扫描。
托1个新手给写了键盘的电子扫描程序,基本功效都能使成为事实,但对键盘的去抖措置惩罚老是做欠好,体现是或不克不及去抖,或按钮相应太卡,或采集到纰缪键值。看来新手对矩阵键盘电子扫描原理掌握较好(网上资料多),但对键盘去抖的知识却有所欠缺,基本都是按照书上说的延时一段时间再采集键值,现实应用中,如许的措置惩罚是远远不敷的,过于简单。现实去抖措置惩罚应该如许举行更合理一些,即连续采集键值,当采集到的键值在一段时间内是不异的,即以为按钮状况已经稳定,此键值为真实键值。别的,按钮开释时,也会有抖动,导致误采键值,是以在键开释时,也应举行去抖措置惩罚,措置惩罚要领同时是连续一段时间采集到无键按下状况,才以为按钮被开释。按照这个要领,我重写了新手的程序,现实应用中体现极好。
现将程序发布如次,供新手参考。
Key.h文件内容
#ifndef __key_H__
#define __key_H__
#define 灭茬_KEY 0x0000
#define S1 0x3801
#define S2 0x3401
#define S3 0x3802
#define S4 0x3402
#define S5 0x3804
#define S6 0x3404
#define S7 0x3808
#define S8 0x3408
#define S9 0x3810
#define S10 0x3410
#define S11 0x2C01
#define S12 0x1C01
#define S13 0x2C02
#define S14 0x1C02
#define S15 0x2C04
#define S16 0x1C04
#define S17 0x2C08
#define S18 0x1C08
#define S19 0x2C10
#define S20 0x1C10
#define KEY_DELAY 20
extern unsigned int Key_Value;
extern void Init_Key();
extern void Scan_Key();
extern bit Key_Pressed;
extern bit Key_Released;
extern unsigned int idata Keypress_Count;
extern unsigned int idata Keyrelease_Count;
#endif
key.c 文件内容
#include
#include “key.h”
bit Key_Down; //是不是有键按下的标记
unsigned int idata Keypress_Count;
sbit Col_Key0 = P2^2;
sbit Col_Key1 = P2^3;
sbit Col_Key2 = P2^4;
sbit Col_Key3 = P2^5;
bit Key_Pressed;
bit Key_Released;
unsigned int Key_Value; bit Key_Down; //是不是有键按下的标记
unsigned int idata Keypress_Count; //一毫秒增加一次的变量
unsigned int idata Keyrelease_Count; //一毫秒增加一次的变量
//矩阵键盘施用间断1作为键盘间断
void Init_Key()
{
P5 = 0; //行线全数置为0
EX1 = 1; // 允许外部钟表秒间断
IT1 = 1; // 外部钟表间断配备布置为边缘触发
}
void Key_Int() interrupt 2
{
Key_Pressed = 1;
EX1 = 0;
}
void Scan_Key()
{
unsigned char temp,rowvalue;
unsigned int key;
int i;
temp = P2;
temp &= 0x3C;
if(temp == 0x3C)
{
Key_Released = 0;
Key_Pressed = 0;
key = 灭茬_KEY;
EX1 = 1;
}
else
{
key = temp;
key = key《《8;
rowvalue = 0x01;
for(i=0;i《5;i )
{
P5 = rowvalue《
DelayMs⑴;
temp = P2;
temp &= 0x3C;
if(temp == 0x3c)
{
rowvalue = rowvalue《
key = key | rowvalue;
P5 = 0x00;
break;
}
}
P5 = 0x00;
DelayMs⑴;
}
if(key!=灭茬_KEY) //如果有键按下
{ if(key==Key_Value) //如果按下的是不异的键
{
if(Keypress_Count》=KEY_DELAY)
{
Key_Down = 1;
}
}
else if(Key_Down != 1)
{
Keypress_Count=0;
Keyrelease_Count = 0;
Key_Value=key;
}
}
else //如果无键按下
{
if(Key_Down) //如果时下是键开释,返回键值
{
if(Keyrelease_Count 》= KEY_DELAY)
{
Key_Down=0;
Keypress_Count=0;
Keyrelease_Count=0;
Key_Released = 1;
EX1 = 1;
return;
}
}
else
{
Keypress_Count=0;
Keyrelease_Count=0;
Key_Value = 灭茬_KEY;
EX1 = 1;
return;
}
}
}
在main.c中的挪用要领为
if(Key_Pressed == 1)
{
//Key_Pressed = 0;
Scan_Key();
}
if(Key_Released == 1)
{
Key_Released = 0;
Ack_Key();
}
更多矩阵键盘的资料请访问http://www.elecfans.com/zhuanti/20111025226587.html
-
SCSI硬盘的关键技术点详解2010-01-27 744
-
现代雷达信号处理机关键技术仿真2011-08-26 840
-
单片机关键技术基础详解(一)2012-02-14 11168
-
单片机关键技术基础详解(二)2012-02-21 8082
-
汽车总线及其关键技术的研究2012-07-10 0
-
CDMA原理与关键技术2012-08-16 0
-
详解5G的六大关键技术2017-12-07 0
-
智能穿戴产业的五大关键技术2019-05-09 0
-
物联网的关键技术有哪些2020-06-16 0
-
智能通信终端有哪些关键技术?2021-05-26 0
-
MIMO-OFDM中有哪些关键技术?2021-05-27 0
-
POE的关键技术有哪些?2021-06-10 0
-
视觉导航关键技术及应用2023-09-25 0
-
单片机关键技术基础详解(三)2012-02-27 6480
-
单片机关键技术基础详解(四)2012-03-09 5999
全部0条评论

快来发表一下你的评论吧 !
