

GIS煤矿安全实时监测系统设计实现解决方案
控制/MCU
描述
1.前 言
由于煤矿生产所具有的特殊作业环境,致使生产过程中潜伏着比一般行业更大的危险性和不安全因素。随着煤炭开采量的不断增加,安全问题变得日益严峻,时常有各种特大事故见诸于媒体。这一切都警示了煤矿安全生产的严峻形势和提高煤矿安全生产的必要性和紧迫性。在计算机、互联网和通信技术高速发展的同时,应用以GIS为核心的监控系统已成为煤矿安全实时监测的一种重要手段。GIS煤矿安全实时监测系统可以将传感器测得的瓦斯浓度、风量、设备状态等多种数据自动地在电子地图中显示出来,结合井下人员定位系统还可以将井下作业人员的位置等也显示在电子地图上。系统数据传输以局域网、互联网等计算机网络为载体。在计算机技术、移动通信技术迅速发展的今天,把各种监测数据信息通过通信网络实时传到监控中心和定时传给责任人,使相关责任人在任何时间、任何地点都能对煤矿安全情况了如指掌,将对煤矿安全生产管理有很大的促进作用。同时,对于地处偏远的矿山,在计算机网络资源有限的情况下,采用移动通信无线传输也很有必要和实际。
2.系统的组成及工作原理
2.1系统组成
基于ARM的GIS煤矿安全实时监测系统主要包括三个部分:矿井端、GSM通信网络、GIS监控中心。
矿井端主要包括GPS模块、GSM模块和ARM控制模块。GPS模块和GSM模块实现定位、无线传输;ARM控制模块实现数据采集和数据处理,是矿井端的主模块。它是工作人员随身携带的ARM嵌入式设备,这个设备可以是几个人共用,在下井工作之前只要输入指纹验证与其相关的个人信息,GIS中心数据库中即可以准确记录下井工作人员。作为数据采集、处理控制模块,核心功能是不断的获取井下工作人员的位置信息以及瓦斯浓度、风速等参数值,并把这些信息通过GSM通信网络发送到GIS监控中心,同时能够随时接收来自监控中心的调度命令。
GSM通信网络用来完成矿井端与GIS监控调度中心之间的信息传输,采用现存的GSM移动信息系统的SMS短消息业务。
GIS监控中心是整个系统的核心,是基于GIS智能化监控管理中心,能够随时显示井下人员的位置、瓦斯浓度或设备状态等信息,并根据数据信息对相应的设备做出控制(人为或自动)。
2.2系统工作原理
矿井端首先实时采集井下工作人员的动态位置(经度、纬度、高度)、时间、状态,以及瓦斯浓度、风速、温度等环境信息,然后由数据处理模块和控制模块进行数据处理后,通过GSM模块将这些信息实时的通过GSM移动通信网络传至GIS监控中心,在具有强大地理信息处理、查询功能的电子地图上进行工作人员、以及所在位置的温度、风速、压力和瓦斯浓度、一氧化碳的浓度等各种参数的准确定位和显示,实现对这些参数的监控、查询,当某一参数超过确定的安全值时即进行报警,监控中心则通过GPS移动通信网络向矿井发送各种监控、调度信号,消除各种隐患,确保煤矿安全生产。
3.矿井端硬件的设计
3.1 GPS模块
GPS模块主要用于定位,通过接收GPS卫星信号,计算出所要定位人员所在的位置。GPS模块由变频器、信号通道、ARM芯片组成。GPS模块通过串行口向主控制器发送定位人员坐标;GPS模块需要配备专门的GPS天线接收GPS卫星信号。一般需要接收三颗以上的GPS卫星信号才能进行准确的定位。为了方便,GPS模块设计安装在井下人员的安全帽上。
考虑到大多数煤矿的实际情况,GPS模块采用GARMIN的GPS25LP。
3.2 GSM模块
井下人员与监控中心之间的通信是通过GSM模块来实现的,在煤矿实时监测系统中采用GSM移动通信系统的短消息业务进行通信,短消息业务属于GSM 数字移动通信系统电信业务,它具有随时在线、不需要拨号、价格便宜、覆盖范围广等特点,特别适合于需频繁传送小流量数据的应用,本模块设计采用 SIEMENS的TC35i无线GSM模块。
3.3 ARM控制模块
ARM控制模块是矿井端的核心控制部件,它是一个基于ARM处理器的嵌入式系统,它的主要功能是进行数据处理和控制矿井端的各组成部分按照通信协议的要求,执行相应的操作。该系统包括CPU存储器、I/O接口以及各种控制逻辑威廉希尔官方网站 等。模块设计首要的工作是对嵌入式处理器进行选择。在一个系统中使用什么样的嵌入式处理器内核主要取决于应用的领域、用户的需求、成本、开发的难易程度等因素。确定了使用哪种嵌入式处理器内核以后,接下来就是结合实际情况,考虑系统外围设备的需求情况,选择一款合适的处理器。结合目前煤煤矿实际情况,选取了AT91R40008微处理器。该处理器是基于处理器核16/32位微处理器大家族中的一个分支,采用高性能的32位结构,具有高密度的16位指令集和低功耗的特点,系列将处理器内核与片内高速存储器和多项外围功能结合在一片微处理器上,为大量的计算机嵌入式控制应用提供了灵活的低成本的解决方案。
确定了各组成模块后,接下来将各个模块、设备与ARM嵌入式系统开发板使用相应的通信电缆连接起来,根据实际情况,再加上少量的外围器件和电源模块就可以构成硬件平台进行矿井端的系统集成。各模块间的关系如图1所示。
4.矿井端的软件设计
在矿井端中,位置信息的获取、短消息的收发、内部数据的处理以及外围控制设备的驱动都是在ARM芯片的统一控制下完成的,这就需要对嵌入式系统进行必要的编程,本系统基于μClinux操作系统,采用C语言进行编程。
4.1 μClinux开发环境的建立
为了实现基于μClinux的应用系统的开发,建立或拥有一个完备的μClinux开发环境是十分必要的。基于μClinux操作系统的应用开发环境一般是由目标系统硬件开发板和宿主PC机所构成。目标硬件开发板用于运行操作系统和系统应用软件,而目标板所用到的操作系统的内核编译、应用程序的开发和调试则需要通过宿主PC机来完成。双方之间一般通过串口,并口或以太网接口建立连接关系
4.2 系统软件流程
矿井端由AT91R40008开发板、TC35i, GPS15 OEM板组成,AT91R40008开发板带有两个串口,其中一个串口与GPS接收模块连接,接收来自卫星的位置信息,另一个串口与TC35i连接,将接收到的定位数据打包成短消息格式通过现有通信网络发送出去,实现人员定位和监控管理。整个系统的工作流程大致如下:系统加电进行复位后,自检并初始化。 GPS模块首次开机后会自动搜索星历历书等信息,接收到定位信息后,将我们所需要的经纬度等位置信息进行编解码处理,打包成短消息的格式,通过TC35i 模块发往用户终端或总机,实现全球范围内的定位和监控管理。整个系统流程图如图2所示:
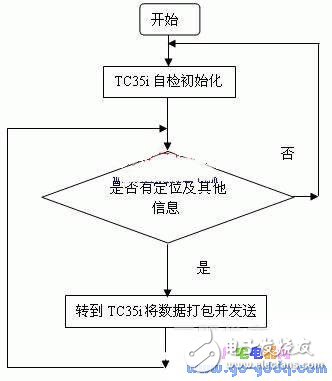
图2 系统流程图
5.结束语
基于ARM嵌入式技术的GIS煤矿安全实时监测系统,主要是利用ARM的强大功能,结合GRP、GSM技术实现了矿井端的煤矿安全实时监测,相对于传统的采用8位单片机作为主控芯片的矿井端,其复杂监控的功能更强,系统更灵活,适用性更好,同时具有更大可扩展性,对加强煤矿安全生产管理将具有一定的推动作用,社会效益和经济效益良好。
-
煤矿安全监控系统2014-06-04 0
-
DTU在煤矿安全生产无线监测2018-10-17 0
-
嵌入式游戏系统是什么组成的?2019-08-20 0
-
【HarmonyOS HiSpark AI Camera】煤矿安全监测系统2020-09-25 0
-
加强小型煤矿安全监测系统的探讨2009-07-04 471
-
基于GIS及组态的煤矿监控系统设计实现2009-09-03 525
-
基于ZigBee技术的煤矿安全监控系统2009-11-04 449
-
煤矿安全生产与监测设备2008-01-07 936
-
煤矿安全生产监测管理系统的设计2011-12-05 795
-
GIS煤矿安全实时监测系统设计2012-05-17 2050
-
WebGIS煤矿安全实时监测网络信息管理系统的设计与应用_隋艳微2017-03-19 867
-
煤矿安全在线监测系统,数据采集网关的应用2020-11-18 2510
-
煤矿安全生产预警系统2024-01-03 739
-
煤矿安全风险监测预警系统2024-06-18 790
-
基于AI网关的智慧煤矿安全监测应用2024-09-24 348
全部0条评论

快来发表一下你的评论吧 !
