

CAN报文自定义协议转发操作原理及步骤
接口/总线/驱动
描述
在CAN总线通信的应用领域中,很多客户需要将CANID放在CAN报文中,这样更方便接入不同的设备,有利于用户通过模块更方便地组建自己的网络,使用自定的应用协议。但是要实现这样的应用,用户往往需要不停地去修改参数。
我司研发的ECAN-401所具备的透明带标识功能则很好地处理这个问题。该方式把串行帧中的 ID 信息自动转换成CAN总线的帧ID。只要在配置中告诉模块该ID信息在串行帧的起始位置和长度,模块在转换时提取出这个帧ID填充在CAN报文的帧ID域里,作为该串行帧的转发时的CAN报文的ID。在CAN报文转换成串行帧的时候也把CAN报文的ID转换在串行帧的相应位置。
转换方式
1、串行帧转 CAN 报文
串行帧中所带有的CAN报文的“帧 ID”在串行帧中的起始地址和长度可由配置设定。起始地址的范围是0~7,长度范围分别是1~2(标准帧)或1~4(扩展帧)。转换时根据事先的配置将串行帧中的 CAN报文“帧 ID”对应全部转换到CAN报文的帧ID域中(如果所带帧ID个数少于CAN报文的帧 ID 数,那么在CAN报文中帧ID的高字节补0。),其它的数据依序转换,如果一帧CAN报文未将串行帧数据转换完,则仍然用相同的ID作为CAN报文的帧ID继续转换直到将串行帧转换完成。
注意:如果将ID长度大于2,设备发送的帧类别会设置为扩展帧。此时用户配置的帧ID和帧类别无效,由串行帧里边的数据决定。标准帧的帧ID范围为:0x000-0x7ff,分别表示为帧 ID1、帧 ID0,其中帧 ID1 为高字节,扩展帧的帧 ID 范围为:0x00000000-0x1fffffff,分别表示为帧 ID3、帧 ID2、帧 ID1、帧 ID0,其中帧 ID3 为高字节。
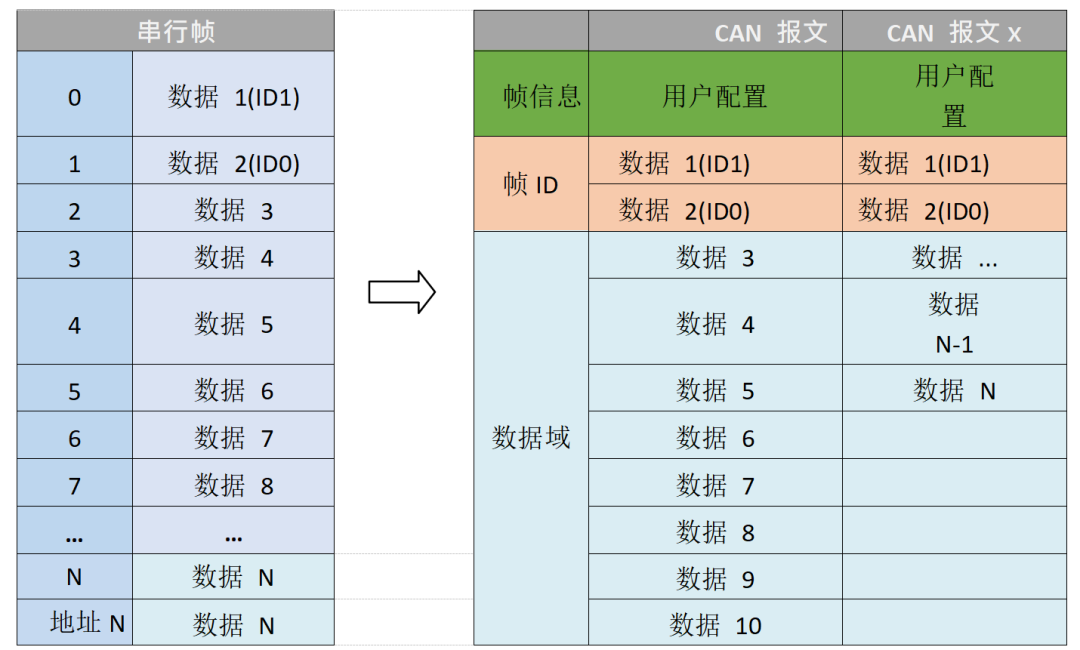
串行帧转换成 CAN 报文(透传带标识)
转换示例:
串行帧转CAN报文(透明带标识)。
该示例配置的CAN配置参数。转换模式:透明带标识转换,起始地址2,长度3。帧类型:扩展帧,帧ID:无需配置,转换方向:双向。则转换前后数据如下。
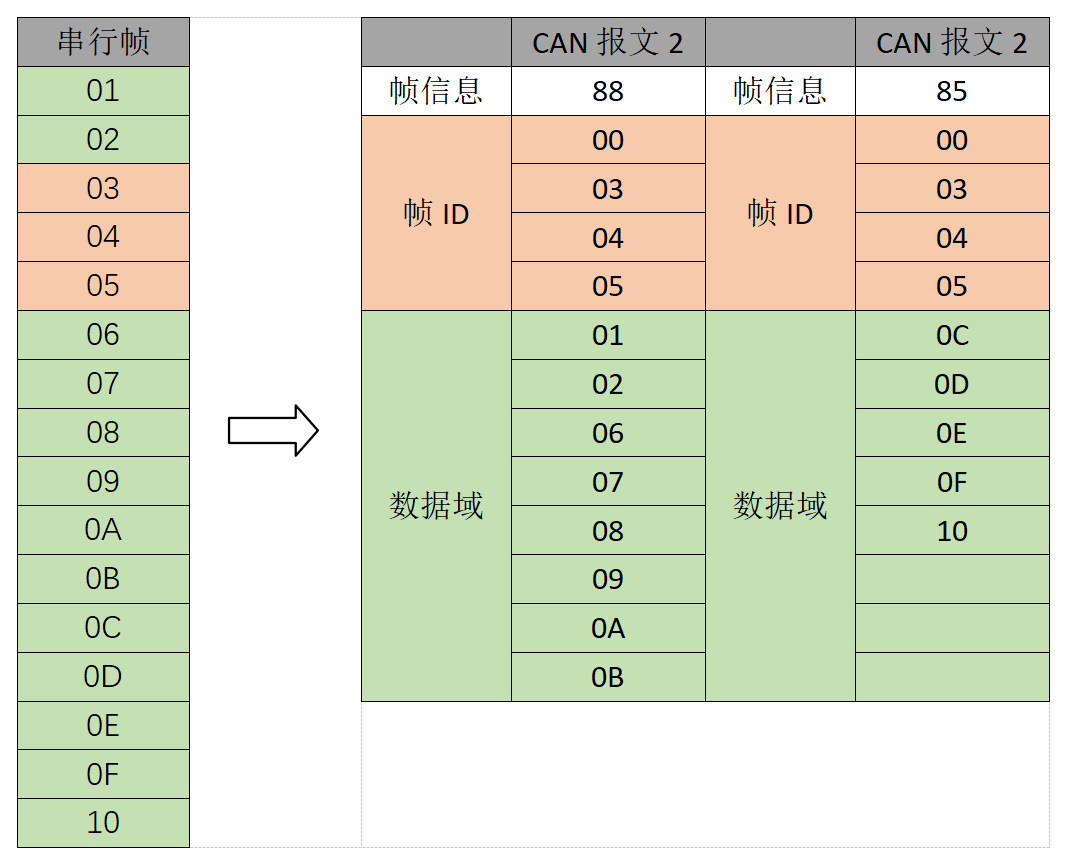
串行帧转 CAN 报文示例(透传带标识转换)
2、CAN 报文转串行帧
对于CAN报文,收到一帧就立即转发一帧,每次转发的时候也是根据事先配置的CAN帧ID在串行帧中的位置和长度把接收到的CAN报文中的ID做相应的转换。其它数据依序转发。值得注意的是,无论是串行帧还是CAN报文在应用的时候其帧格式(标准帧还是扩展帧)应该符合事先配置的帧格式要求,否则可能致使通讯不成功。

CAN报文转换成串行帧
转换示例:
该示例配置的CAN配置参数。转换模式:透明带标识转换,起始地址2,长度3。帧类型:扩展帧,帧类型:数据帧。转换方向:双向。发送标识符:0x00000123,则转换前后数据如下。
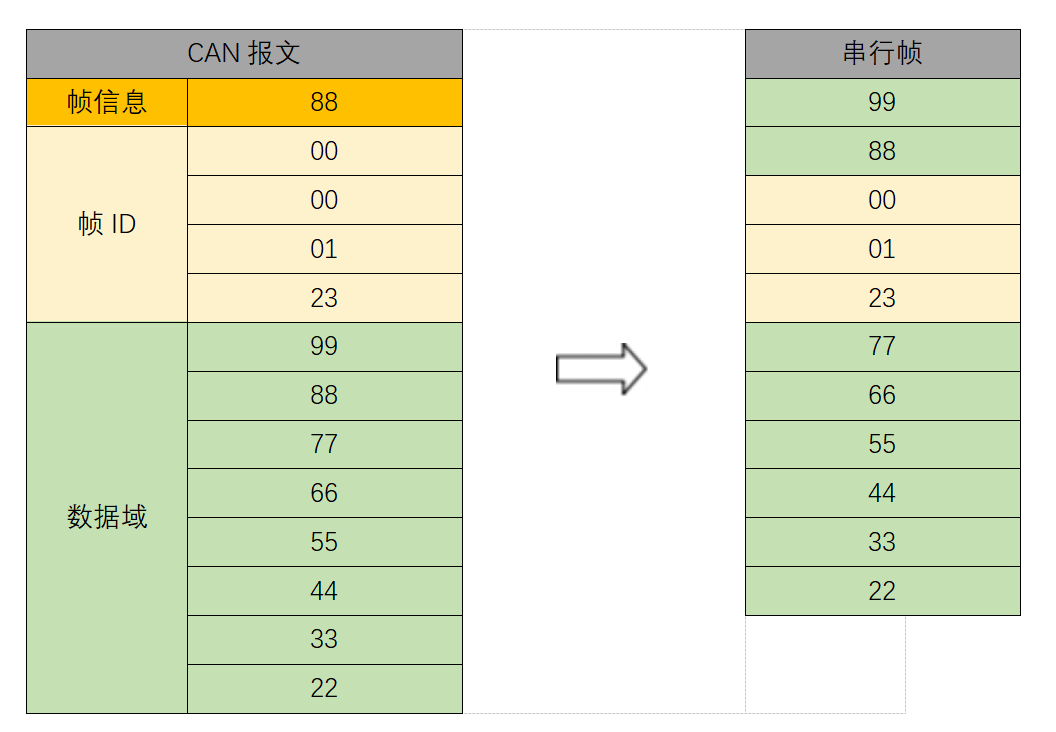
CAN 报文转串行帧示例(透明带信息转换)
在了解了ECAN-401的透明带标识功能后,我们可以开始实际操作。
3、实际操作
准备以下设备:
ECAN-401一台
CAN分析仪ECAN-U01一台
XCOM串口助手
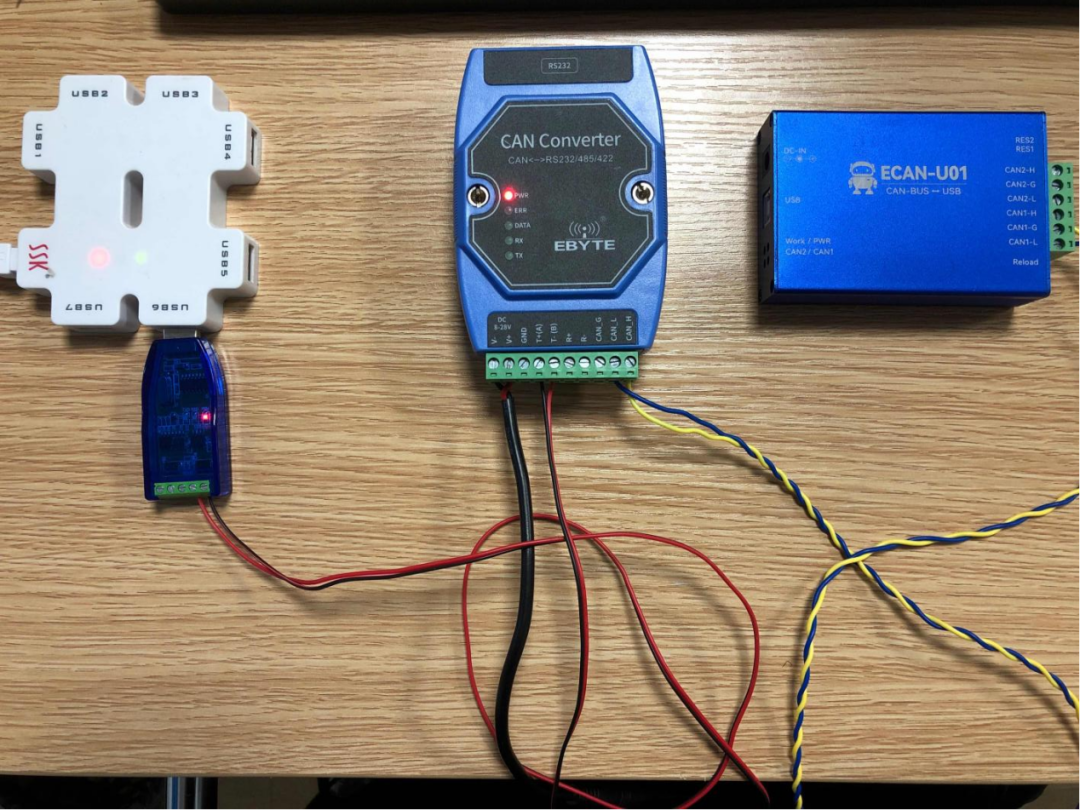
这里我们使用ECAN-401做数据转换工具,ECAN-U01发送和接收CAN报文,XCOM串口助手软件模拟串行设备发送串行数据。将ECAN-401与ECAN-U01的CAN_L和CAN_H连接,ECAN-401的485接口通过485换USB转换器连接到电脑,如下图所示:
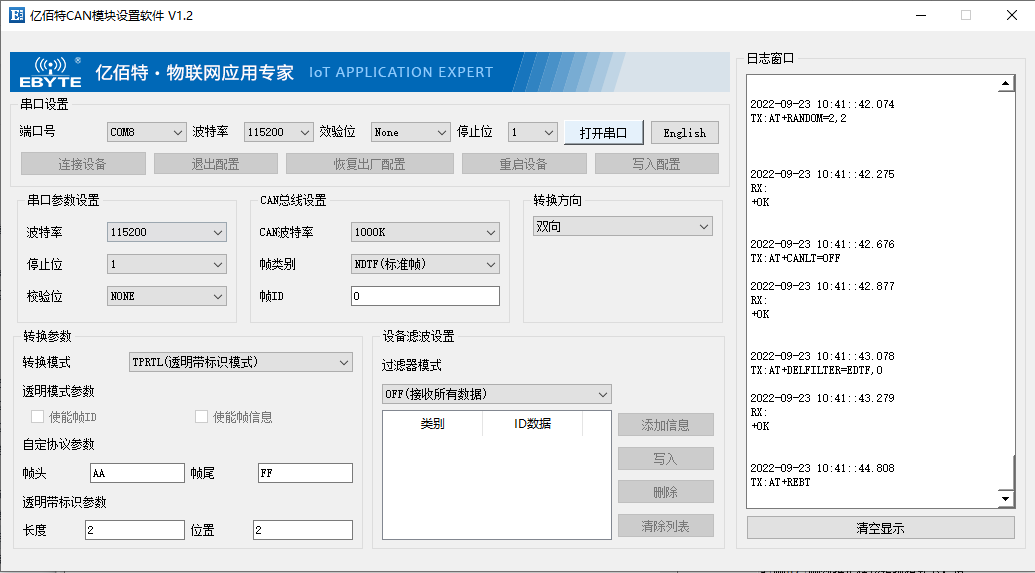
通过ECAN-401的上位机,将设备通讯模式切换为透明带标识模式,CAN波特率1000K,ID长度2,ID位置2参数配置如下图:
打开CAN分析仪ECAN-U01以及XCOM软件,使用XCOM软件模拟出一串行设备,通过ECAN-401的485串口发送串行数据:首先使用标准帧发送两包数据:11 22 03 44 55 66 77 88 99 00,这里可以看到ECAN-U01设备已经接收到了ECAN-401所转换出来的数据:
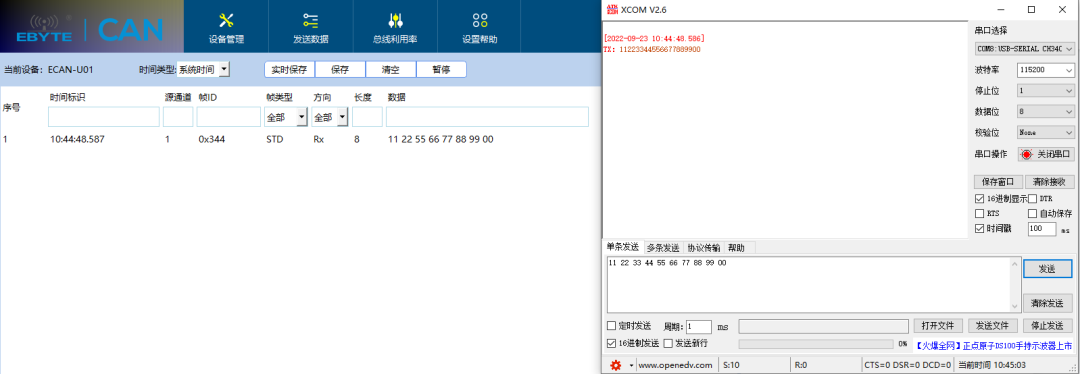
这里可以看到ECAN-U01已经成功接收到ECAN-401转化出来的数据,帧ID:03 44,数据域:11 22 55 66 77 88 99 00。
再从CAN分析仪端发送数据到串行端口,如下图所示:
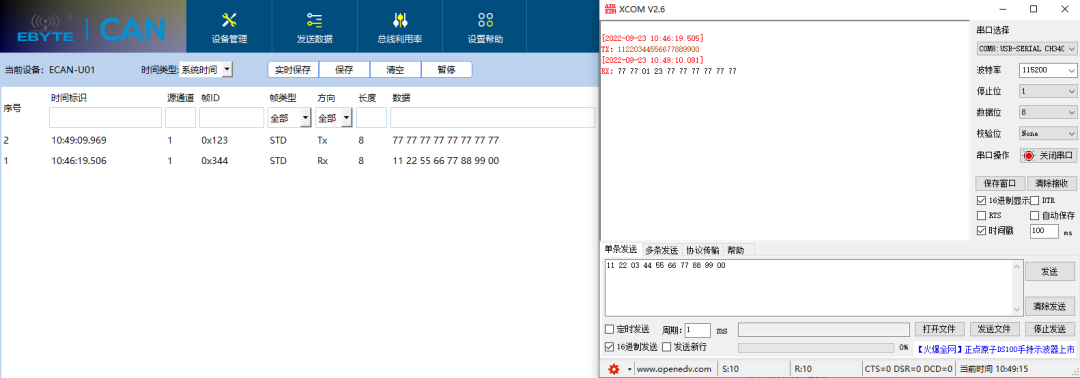
串口端也是按照透明带标识来组包,这样就成功实现了CAN协议按照透明带标识来收发数据。
编辑:黄飞
-
向can发送报文2019-03-28 0
-
自定义视图组件教程案例2022-04-08 611
-
CAN报文定义2021-09-14 0
-
基于自定义协议的网络地理信息系统2009-04-18 878
-
基于TCP/I 的自定义协议栈的研究与开发2009-05-30 718
-
1602自定义字符2016-01-20 753
-
如何在android设备上安装自定义rom2019-11-05 5158
-
C#与STM32自定义通信协议2021-12-24 1165
-
ArkUI如何自定义弹窗(eTS)2022-08-31 2201
-
ESP32上的自定义UART协议开源2023-02-13 595
-
CAN报文固定协议转发教程2023-05-12 1423
-
【教程】CAN报文固定协议转发2023-05-15 870
-
【教程】CAN报文自定义协议转发2023-05-31 1663
-
labview超快自定义控件制作和普通自定义控件制作2023-08-21 494
-
如何创建TestStand自定义步骤2024-09-11 1105
全部0条评论

快来发表一下你的评论吧 !
