

基于eCos操作系统的FLASH驱动程序分析与移植
嵌入式操作系统
描述
基于eCos操作系统的FLASH驱动程序分析与移植
0 引 言
嵌入式系统需要支持的外部设备种类繁多,如何构造运行良好的嵌入式设备的驱动程序,对嵌入式操作系统的实际应用有重要意义。eCos是一种源代码公开的实时嵌人式操作系统,对嵌入式应用具有良好的支持,内核专门设计了便于设备驱动管理和开发的I/O包和DEV包,开发人员可以方便地将自己开发的驱动程序加入其中,与别的系统组件一起进行配置。
1 系统目标板简介
硬件目标板是为无人机系统设计的系统开发板,它是从Arca系统测试板经过功能简化设计而来的满足无人机系统要求的目标板。硬件目标板如图1所示。
GT2000支持SRAM,FLASH,ROM,VLIO(静态段支持可变等待时间I/O设备)和SDRAM(同步动态RAM)等外部扩展存储器。GT2000的外部地址空间是按体(bank)划分的,有四个体属于静态存储器区域,由引脚CS0~CS3选择,在将FLASH,SRAM,VLIO(用作其他外设接口)等静态I/O设备地址分别设计在CS0~CS2区域内,由GT2000内部的外部内存访问接口(EMI)控制器中的静态内存访问控制寄存器(SMCR)进行访问控制,分配地址访问接口。
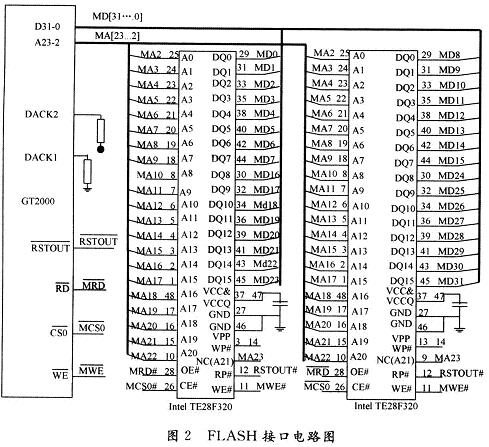
系统目标板选用两片Intel公司的TE28F320的FLASH(16位)并联获得32位总线宽度。Intel公司的TE28F320是32 Mb(2 M×16 b)多功能FLASH,2.7~3.6 V单电源供电,读取时间为70 ns,封装格式为48-Pin TSoP(12 mm×20 mm)或48-Ball TFB-GA,可被擦写10 000次。方舟的JTAG仿真器支持TE28F320 FLASH,可以通过JTAG接口进行在线读写和擦除,这给调试程序和硬件提供了方便。
FLASH的威廉希尔官方网站 原理图以及GT2000的引脚“DACK[2..1]/MD_MEM[1..0]”设置如图2所示。
2 eCos驱动程序的体系结构与驱动程序设计模式
eCos操作系统的设备驱动程序通常包含以下内容:提供一些底层函数,负责完成设备初始化与配置、注册设备,从设备收发数据、控制设备、处理设备中断等,并进行设备管理。eCos操作系统内核支持设备驱动程序的同步、计时、内存管理、缓冲区管理、设备名空间及资源管理等。
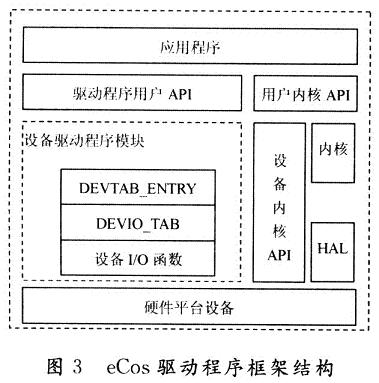
eCos系统的I/O包中包含了设备的驱动程序接口模块,全部是以组件的形式存在。设备驱动程序模块支持系统设计的分层结构。设备I/O包中的程序需要使用设备DEV包中的程序,而设备DEV包中的程序需要调用eCos的硬件抽象层包中的底层接口函数,如图3所示。
2.1 设备驱动程序用户API
eCos为应用程序提供了一组用户API函数,这些操作包括对设备进行初始化和配置,获取配置信息,对设备进行读写等。设备驱动程序必须使用设备句柄进行设备操作,通过cyg_io_lookup()函数把设备在系统中的惟一名字映射成设备句柄。
2.2 eCos驱动程序与内核及HAL的接口
应用程序在使用设备的时候,通过驱动程序的用户API函数访问设备驱动程序,设备驱动程序又调用设备内核API函数与内核和硬件抽象层HAL进行交互,设备驱动程序和内核又通过硬件抽象层HAL对硬件平台进行操作。
eCos内核向设备驱动程序提供调度、时钟、同步、中断等内核服务的支持。在某些嵌入式应用中,部分内核服务并不是必需的。在配置时不选择Kernel包,设备驱动程序的内核服务支持由硬件抽象层提供。
HAL包含所有与平台相关的代码,是eCos操作系统对硬件进行的抽象定义,它直接控制和访问硬件,为eCos内核和高层代码提供服务。
I/O包和DEV包构成了eCos驱动程序的基本框架。设备驱动程序一般分为三个部分,分别为设备表入口DEVTAB_ENTRY、设备I/O函数表DEVIO_TAB和设备I/O函数。I/O包提供抽象的设备操作支持,应用程序访问设备时使用逻辑设备名,每个设备都对应一个惟一的逻辑设备名。DEV包提供设备操作的底层实现,对硬件通过HAL直接操作。
eCos中的所有设备驱动程序都使用设备表入口进行描述。设备表入口使用宏DEVTAB_ENTRY()可以生成一个设备表入口数据结构。其中,_handlers指向DEVIO_TABLE入口函数。提供用户应用程序的调用支持;_priv指向设备真正的硬件操作数据结构,提供硬件设备与上层软件的交互。设备I/O入口宏定义如下:

2.3 设备驱动程序的设计模式
一般来说,eCos提供了三种驱动程序设计模式。设备驱动程序与内核和HAL之间的API接口主要对中断以及中断处理程序的ISR,DSR和线程的同步进行控制和管理。eCos设备驱动程序的中断模块分为三个层次,分别是中断服务程序ISR,中断滞后服务程序DSR和中断线程。中断服务程序ISR在响应中断时立即调用,中断滞后服务程序DSR由ISR发出调用请求后执行,中断线程为驱动程序的客户程序。具体为硬件抽象层HAL对硬件中断源译码,并在最短的时间内调用ISR中断服务程序,ISR对硬件中断可以立即处理,但限于与中断线程交互较少的设备。大多数情况下,需要请求相应的中断滞后服务程序DSR进入线程调度运行,DSR将在ISR执行完成后立即运行。如果需要复杂的中断服务则要用户自己定义中断线程。对于一个具有中断的设备驱动程序,必须提供ISR和DSR。
3 基于方舟开发板的Inter FLASH驱动程序分析与移植
3.1 Inter公司的TE28F320的FLASH芯片驱动程序分柢
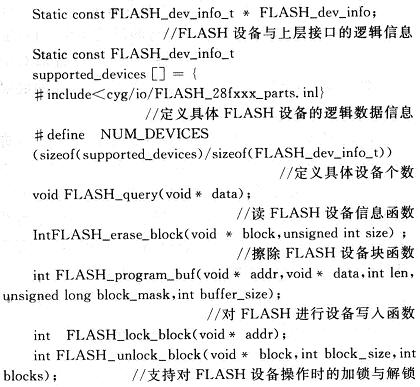
Inter FLASH驱动程序FLASH_28fxxx.inl文件定义了FLASH设备低层的管理设备I/O函数,FLASH_28fxxx_parts.inl文件定义了FLASH设备逻辑信息。eCos系统I/O包使用DEVTAB_ENTRY()和DEVIO_TABLE()定义的_priv指针对FLASH设备低层I/O函数进行调用。具体定义如下:
3.2 系统地址空间的分配方案。
当MMU内存管理单元的控制寄存器MCR.ATE为0时,地址映射方式变为直接映射物理方式,如图4所示。
直接映射方式的映射关系是:在使用高速缓存方式时将虚拟地址A1区域(0x80000000~0xA0000000)映射到实际物理地址0x00000000~0x20000000的区域;根据目标开发板的设计规范,系统的FLASH的物理地址从0x00000000开始,系统设计编写程序时使用相应的虚拟地址空间为0x80000000~0x80FFFFFF。SRAM的物理地址从0x04000000开始,使用相应的虚拟地址空间为0x84000000~0x84200000。
3.3 修改eCos硬件抽象层中FLASH和SRAM的配置信息以及FLASH设备驱动程序
不同的两块开发板所采用的芯片,特别是FLASH芯片有可能是不一样的。由于为无人机专门设计开发的目标板使用的是Inter公司的TE28F320的FLASH芯片,与Arca公司使用的FLASH驱动程序不一样,必须修改FLASH驱动及FLASH和SRAM的配置信息。
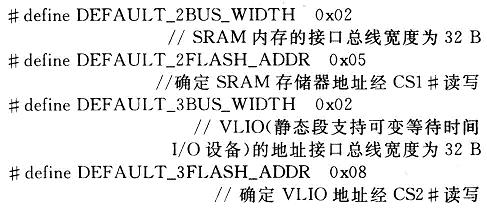
(1)SRAM布局文件修改如下:
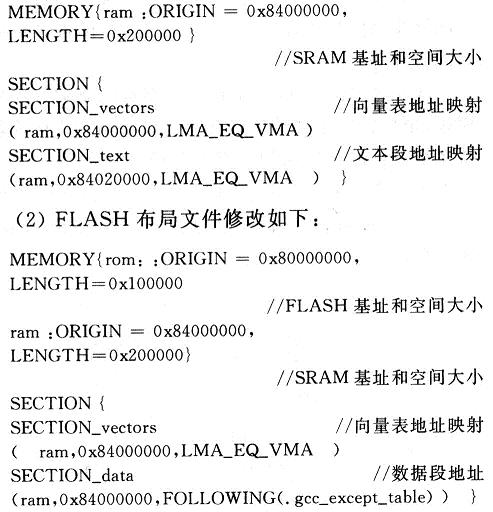
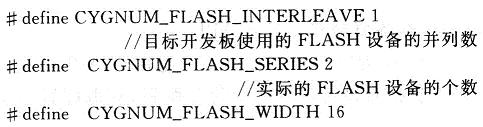
(3)FLASH驱动程序FLASH_28fxxx.inl文件中的数据定义修改如下:

(4)修改平台抽象层文件plf_hci.h文件
由于目标开发板上没有采用EEPROM和HCI(硬件配置接口)的方式存储系统硬件信息,而是采用在eCos平台抽象层中把开发板上的硬件信息静态存储在文件中。在平台抽象层文件plf_hci.h中修改如下:
4 驱动测试
4.1 Redboot简介
Redboot是一个标准的嵌入式系统引导和Debug环境,是基于eCos的一个应用程序,使用eCos的硬件抽象层作为它的基础。内含GDBstub,允许从应用程序调试的GDB宿主机链接目标平台,通过串口或网口进行调试。既可以用在产品的开发阶段(调试功能),也可以用在最终的产品上。
4.2 系统测试结果
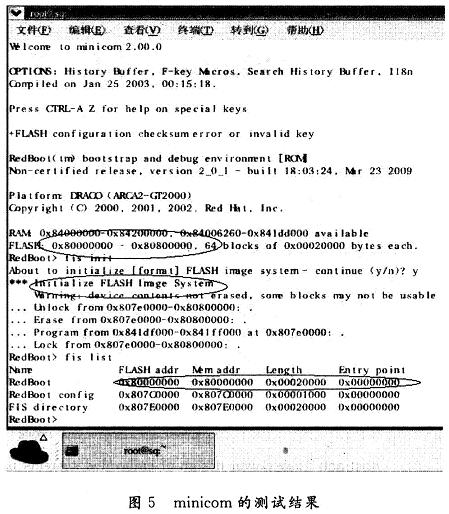
使用eCos图形配置工具对修改好的eCos硬件抽象象层和FLASH设备驱动程序进行裁剪,并用串口进行系统测试,通过minicom显示Redboot运行的FLASH和SRAM地址结果如图5所示。
5 结语
本文通过裁剪和移植FLASH驱动程序到目标开发板上,展示上具体的修改硬件抽象层和设备驱动程序代码方法。通过实际裁剪,配置一个具有实际应用价值的Redboot,对于嵌入式技术的学习和应用具有现实的意义。本文的难点在于eCos硬件抽象层和设备驱动程序源代码的理解和修改。
-
AD7780-适用于单片机平台的无操作系统驱动程序2021-05-20 997
-
ECOS嵌入式系统的S3C2510以太网驱动程序设计2009-08-11 876
-
Windows CE 5.0下LCD驱动程序移植2009-08-28 378
-
eCos在LPC2294上的移植分析与应用2009-09-02 883
-
基于Linux操作系统的设备驱动程序开发2009-09-02 690
-
基于eCos系统的SPCE3200中SD卡驱动程序的开发2009-11-05 1286
-
嵌入式操作系统VxWorks设备驱动程序的设计2011-03-21 524
-
嵌入式操作系统uClinux和eCos的比较2011-04-18 1713
-
eCos嵌入式操作系统构建2011-05-05 1312
-
AD7887-微控制器无操作系统驱动程序2021-04-22 1047
-
AD7799-微控制器无操作系统驱动程序2021-04-24 1568
-
AD5162-微控制器无操作系统驱动程序2021-05-22 1036
-
VxWorks操作系统下CompactPCI总线驱动程序的设计2021-08-31 694
-
手把手教你在flash上移植fatfs文件系统(含实时操作系统)2021-12-09 1210
-
了解和使用无操作系统和平台驱动程序2022-12-15 1244
全部0条评论

快来发表一下你的评论吧 !
