

影响机器人落地和渗透提升的关键
机器人
描述
一、风起人形机器人,多方势力入局
1.1 复盘工业机器人:场景适用性+降本是提升渗透率的关键
传统机器人按照使用类型和应用场景的不同,主要分为三类; 1)工业机器人:工业机器人指面向工业领域的多关节机械手或多自由度机器人,在工业生产 加工过程中通过自动控制来代替人类执行某些单调、频繁和重复的长时间作业,主要包括 焊接机器人、搬运机器人、码垛机器人、包装机器人、喷涂机器人、切割机器人和净室机 器人。工业机器人在机械结构上有类似人类的行走、扭腰、大臂、小臂、手腕、爪子等部 件,由计算机控制。工业机器人广泛应用于电子、物流、化工等工业领域。 2)服务机器人:指在非结构环境下为人类提供必要服务的多种高技术集成的先进机器人,主 要包括家用服务机器人、医疗服务机器人和公共服务机器人。其中,公共服务机器人指在 农业、金融、物流、教育等除医学领域外的公共场合为人类提供一般服务的机器人。 3)特种机器人:特种机器人指代替人类从事高危环境和特殊工况的机器人,主要包括军事应 用机器人、极限作业机器人和应急救援机器人。应用于专业领域,一般由受过专门培训的 人员操作或使用,辅助机器人或代替人执行任务的机器人。
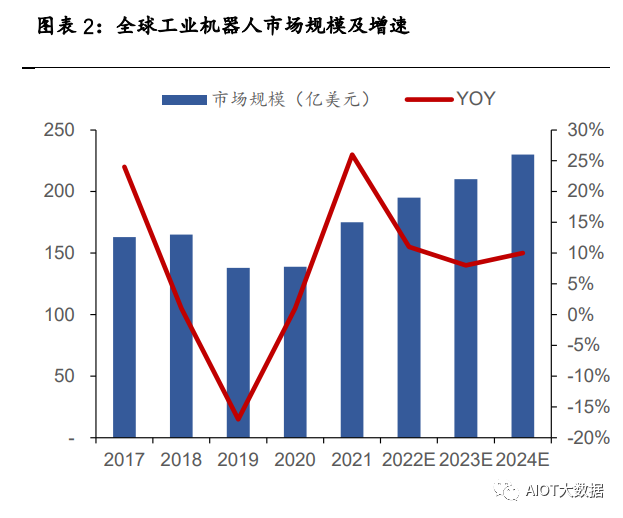
软硬件技术为机器人发展提供坚实基础,整体机器人市场规模呈现逐年提升趋势。随着互联 网、计算机技术不断发展,机器人逐渐从机械自动化向人工智能化方向前进,机器人技术逐渐 成熟,应用领域不断扩展,不断提升工业等场景自动化水平和智能化水平,机器人市场规模呈 现上升趋势。1)工业机器人方面,随着国产工业机器人的发展,国内机器人逐步渗透到以往 自动化水平较低的领域,不断提升我国制造业自动化水平;2)服务机器人方面,随着国内互 联网等企业的入局,应用市场逐步多元化,如智能配送、家庭机器人、AI 教育等。 从市场规模来看,全球工业机器人市场规模呈现稳步增长趋势,2021 年市场规模为 175 亿美 元,IFR 预计 2024 年全球工业机器人市场规模有望达到 230 亿美元;服务机器人整体保持较高 速增长,2021 年市场规模为 172 亿美元,IFR 预计 2024 年全球工业机器人市场规模有望达到 290 亿美元;特种机器人方面,2021 年市场规模为 82 亿美元,IFR 预计 2024 年全球特种机器 人市场规模有望达到 140 亿美元。
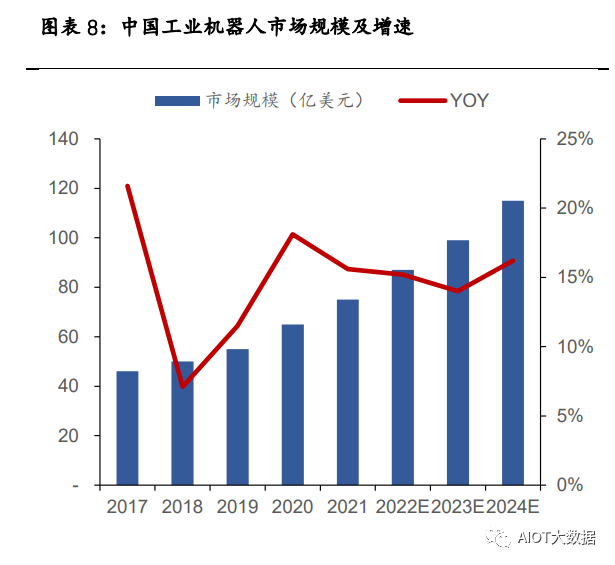
从竞争格局来看和下游市场来看: 1) 工业机器人:参考 MIR 睿工业数据,海外企业在工业机器人方面积淀依然深厚,海外机器 人企业依然在我国占据较大市场份额。我们机器人企业技术不断追赶海外企业,国内工业 机器人市占率逐渐提升,2023Q1 国内工业机器人市占率提升至 40.8%,相比 2022Q1 提升约 3.6pct。从应用场景来看,新能源汽车、动力电池、医疗增速相对较快,是拉动市场增长 的主要应用场景。 2) 服务机器人:服务机器人方面,下游细分场景较多,如商用服务机器人这块细分产品包括 有送餐、配送、迎宾、消杀,清洁类机器人等,整体竞争格局较为分散。
国内工业机器人发展复盘:场景适用性+成本是影响应用的重要因素
我们认为以下两个因素是影响机器人落地和渗透提升的关键:1)场景适用性,机器人本身的 感知能力,思考决策能力和执行能力决定了潜在的应用场景;2)成本,成本是决定机器人渗 透的关键,若场景应用成本过高则相应场景难以应用机器人。
协作机器人提升了机器人场景适用性+降低成本,加速工业机器人渗透。 协作机器人是工业机器人的分支之一,相比传统工业机器人,协作机器人追求轻量化、柔性及 安全协作性。2008 年第一台轻量化、小型化、人机协作的六关节协作机器人诞生,但 2018 年 以前市场规模相对较小。在 5G 通信、大数据、云计算、智能物联网、人工智能等为技术支撑 的背景下,协作机器人潜在场景逐步提升,渗透率逐步提升,市场规模逐步扩大。 协作机器人扩展了应用场景、降低了应用成本:1)协作机器人逐渐打破了传统工业场景的局 限,在机器人产品与工人之间无需设置隔离栏进行分离,双方能够在共同空间中进行近距离交 互,进行人机协作,同时较容易编程,扩展了应用场景;2)价格上,传统工业机器人的价格 一般位于 10 万~40 万人民币之间,使用寿命为 5~8 年,而要将其应用到生产线上,那将要多出 2~3 倍的部署花费,而协作机器人的价格一般介于 2~3 万美元,但因为省去了部署的过程,应 用成本有所降低,从而提升了工业机器人在工厂等场景的渗透率。
1.2 人形机器人风起,多方势力入局
人形机器人处于产业早期阶段。目前,人形机器人处于产业链初期阶段,世界范围内对于人 形机器人并没有标准定义,常常将其模糊定义为外表和行为都接近人的机器人。从应用角度来 看,人形机器人可以应用于工业领域也可以应用于商用、家庭领域,对传感和人机交互要求较 高,更接近于服务机器人。 参考 GGII 研究,当前,全球人形机器人行业处于发展的早期阶段,市场上真正意义做人形机 器人的企业较少,主要集中在日本、美国、欧洲、中国等机器人产业链较为领先的国家和地区。 多数产品还处于原型或者概念验证阶段,尚未实现大规模量产和广泛商业化应用。已实现推出 原型机/产品的公司包括日本本田、美国波士顿动力、美国敏捷机器人、中国优必选、中国小 米和美国特斯拉等。
从人形机器人发展来看,1969 年,日本早稻田大学研制出了全球第一台双足机器人。发展至 今,人形机器人技术研究的主要方向还是围绕着如何让它快速鲁棒地在人类的生活环境里面去 运动而展开。这具体经历了三个阶段:第一个阶段是 1969-1995 年,它是一个缓慢静态行走的 过程,以日本本田 ASIMO 机器人的前身为代表;第二个阶段是 1996-2015 年,此时是连续动态 行走,这时候更多考虑到了机器人的质心惯量以及质心的加速度等因素;第三个阶段是 2016年至今,追求的是高动态的运动性能,以波士顿动力的 ATLAS 机器人做出的难度较高的运动动 作为标志。
商业化渐进,多方势力纷纷布局。人形机器人方面,除了传统科研机构和机器人企业以外, 互联网、车企等多方势力也纷纷入局。2022 年 8 月,小米推出 CyberOne;2022 年 9 月 30 日特 斯拉展示 Optimus 原型机,并宣称 2 万美金的量产价格;2022 年 11 月,大语言模型 GTP 发布, 2023 年 1 月,优必选向港交所递交招股说明书。我们认为随着各方的入局及 AI 技术的发展, 人形机器人整体商业化应用渐进。
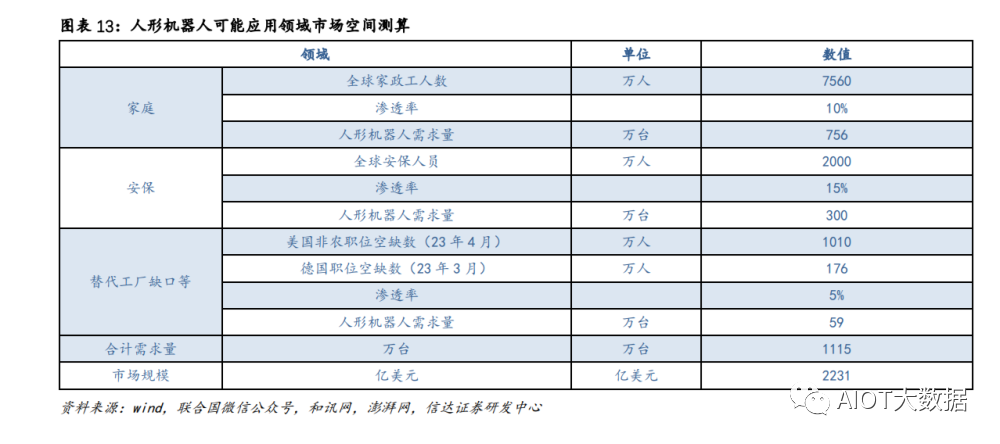
潜在市场规模超万亿人民币。人形机器人主要目标是在某些场景上代替人工,潜在市场空间 大。以中短期来看,我们认为家务、安保及代替欧美等发达国家工厂缺口等可能为早期潜在应 用场景:1)家务应用方面,以特斯拉公布机器人性能来看,可以完成浇花等简单家务,未来 随着进一步完善,有望代替部分家政人员;2)安保领域,OpenAI 提供 ChatGPT 为 EVE 机器人 提供软件支持,让其有望在安保领域应用,尤其是保安、监狱、养老院等领域,因此我们认为 安保领域有望成为潜在应用场景;3)代替工厂缺口,海外发达国家劳动力成本高,以德国为例,最低时薪为 12 欧元(2023 年 6 月 21 日欧元兑美元汇率为 1.092,换算为 13.1 美元),若 机器人一年工作 300 天,日工作 24 小时,换算成人工费用为 9.43 万美元/年。若特斯拉机器 人量产目标价能达到 2 万美元,相比发达国家人工成本而言,Optimus 使用成本较低,有望替代 部分空缺劳动力。
我们仅计算家庭、安保场景和部分发达国家职位缺口场景下的潜在市场空间,这些潜在市场 规模为 2231 亿美元(价格以 2 万美元单台测算),市场规模超过万亿人民币:1)假设仅计算 家庭、安保、部分发达国家替代工厂职位缺口需求;2)家庭方面,目前扫地等服务机器人渗 透率较高,应用场景相对较容易实现,因此假设渗透率达到 10%;3)安保领域,由于安保领域 主要应用场景是监控和巡视,相较工厂场景实现较为容易,考虑发达国家人力成本较高,假设 渗透率达到 15% ;4)替代发达国家工厂缺口,考虑目前工厂缺口人数,由于工厂环境较为复 杂,初始从搬运等简单环节的需求渗透,因此假设渗透率为 5%。
短期来看,制约人形机器人应用的主要是:运控能力需要提升,高技术+高成本+应用场景为 主要痛点
1)运控能力为核心,技术要求高,需要提升机器人感知+思考+执行能力。机器人目前技术较 为复杂,涉及软硬融合等技术,对运控技术要求较高。以优必选机器人为例,需要机器人本体 技术、人工智能技术,手眼协调、人机交互、SLAM与导航等融合技术,技术门槛较高。分开来 看,机器人本体相关技术包括高性能的伺服驱动器、机器人传动、运动规划与控制算法等方面; 人工智能方面,包括视觉算法和语音能力、人机交互能力、以及对环境的理解能力;在底层技 术方面,包括操作系统等方面。我们认为,短期来看,运动控制软件与硬件之间的复合能力是 人形机器人核心痛点,如目前展示的部分机器人存在动作僵硬等情况,未来随着 AI 深度强化 学习、仿真+AI 大模型的应用,运动能力、步态控制等有望优化。 2)成本高,人形机器人技术包括步态规划、人机交互、手眼协调、视觉与导航等多方面技术, 高技术情况下,人形机器人成本较高。 3)产业链处于初期阶段, 由于整体人形机器人产业处于初期阶段,且价格相对较高,因此应 用场景不太明确。我们认为随着人形机器人功能稳定性、操作简易性、交付和维护、价格方面 等痛点逐步解决,商业化有望到来。
二、AI 赋能+特斯拉入局,人形机器人产业化有望加速
2.1 特斯拉入局,开启蓝海新赛道
特斯拉入局,人形机器人远期市场空间大。2021 年特斯拉首次公布人形机器人项目,2022 年 特斯拉正式公布首款人形机器人原型,展示了 Optimus 搬运箱子、为植物浇水、在汽车工厂中 移动金属棒等可能应用场景,人形机器人迭代升级速度较快。2023 年 5 月,特斯拉 CEO 埃 隆·马斯克在大会现场介绍了特斯拉人形机器人 Optimus 的全新型号,展示了人形机器人抓取 物体的能力,运控能力进一步提升,人形机器人已经拥有电机扭矩控制、环境探索与记忆、基 于人类跟踪运动的 AI 训练以及物体操纵能力。我们认为,从最开始提出人形机器人概念,到 原型,再到拥有一定抓握能力和操纵能力,特斯拉在人形机器人领域迭代迅速,未来产业化有 望加速。
AI 赋能,人形机器人产业化有望加速。OpenAI 的 GPT 出现有望推动 AI 感知现实世界,并与现 实世界进行交互,进而推动大模型在物理世界应用。目前来看,大模型在人形机器人的行动中 有望扮演推理决策的角色,将人类的自然语言转化为机器人可执行的步骤,从而补全机器人核 心的推理决策能力,推动机器人走向通用之路。 参考微软 Autonomous Systems and Robotics Group 将大模型结合实际机器人的案例:研究者 使用 ChatGPT 生成机器人的高层控制代码,从而通过自然语言和 ChatGPT 交流,使用 ChatGPT 来控制机械臂、无人机、移动机器人等机器人,他们在没用任何微调的情况下,利用大语言模 型去控制机器人完成各种任务。我们认为,AI具有快速学习训练和迭代的能力,通过学习理解 人类语言,提升人形机器人的智能化水平,使机器对人的意图、对环境的理解进一步加深,最 终推动人形机器人产业化。
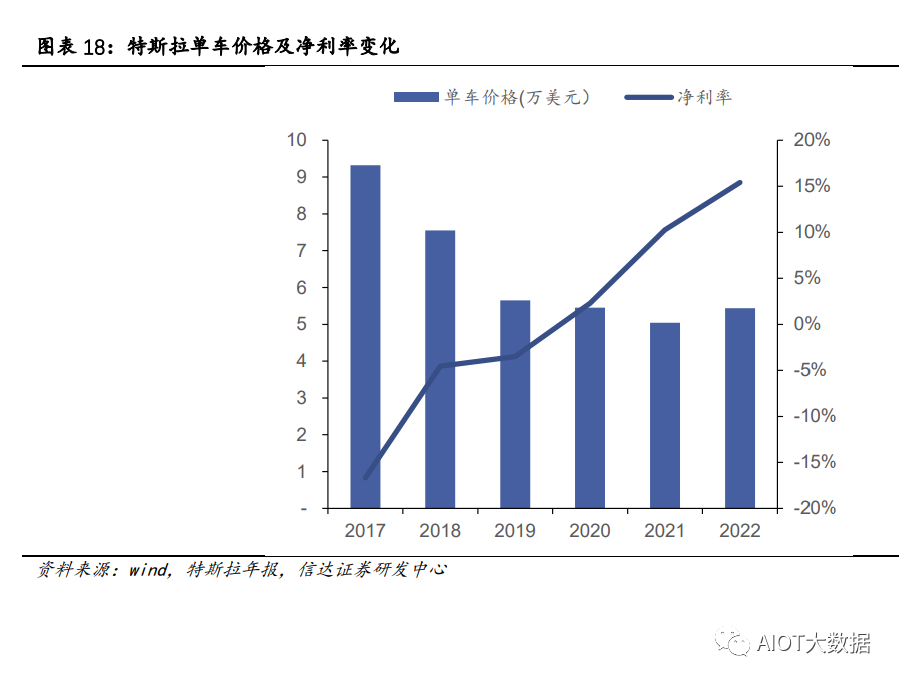
特斯拉产业链共用+规模化降本能力,有望加速人形机器人落地。 1)特拉斯在新能源汽车端积累了大量配套产业链资源,而电动汽车与人形机器人产业链有共 通之处,如电池、电机、电控、芯片、摄像头、传感器等多种零部件,我们看好特斯拉产 业链迁移能力。 2)特斯拉规模化降本能力: 以特斯拉电车为例,从 2017-2022 年,特拉斯汽车单车价格降幅 明显,而公司净利率不断提升,这反应了特斯拉较强的规模化降本能力。 3)特斯拉 AI 领域和芯片方面的积淀: 2022 年 Tesla AI DAY 中,特斯拉展示了 Dojo 的单个 训练模块由 25 个特斯拉自主研发的神经网络训练芯片——DI 芯片组成。DI 芯片则由台积 电制造,采用 7nm 工艺,拥有 500 亿个晶体管。实际应用中,特斯拉将以 120 个训练模块 组装成 ExaPOD,每个 ExaPOD 内置 3000 个 DI 芯片,拥有超过 100 万个训练节点,算力达 到 1.1EFLOP*(每秒千万亿次浮点运算)。此外,特斯拉自身自动驾驶领域积淀的感知方面 算法也有望移植人形机器人,加快其产业化进程。
特斯拉 Optimus 方案成本较低,量产可能性较大。
驱动方案:采用电机驱动
机器人一般采用液压驱动或者电机驱动方案,相比液压驱动,电机驱动方案性价比高:1) Atlas 选择液压驱动方案,Atlas 可以像运动员一样奔跑、翻转、跳跃和腾空,并能够快速越 过具有一定倾斜度的障碍。Atlas 拥有世界上最紧凑的移动液压系统之一,其核心原理是通过 液体压缩泵产生高压液体,高压强作用于缸体产生巨大推力,带动机器人关节运动。但缺点是 噪音大、易漏液、对污染敏感、对液压元件的精度质量要求高、对维护团队要求高等,导致制 造成本居高不下,难以走出实验室、走向商业化;2)特斯拉 Optimus 选用了稳定性、性价比 更高的电机驱动方案,更加注重实用性,量产可能性较高。
视觉感知:采用纯视觉方案,成本较低
Optimus 复用了 Tesla 汽车上的纯视觉环境感知神经网络,采用纯视觉算法实现对环境的感知 和目标识别,成本较低。1)Optimus 的头部集成三颗摄像头(鱼眼摄像头),可以提供大于 180 度体前场景覆盖。2)而 Atlas 需要深度相机和激光雷达,使用深度相机以每秒 15 帧的速 度生成环境点云。点云是距离测量数据的集合。Atlas 的感知软件使用多平面分割的算法从点 云中提取表面。接着算法输出的数据被输入地图系统,最后系统帮助 Atlas 用相机看到不同物 体建立模型。
运控环节:采用实时状态感知的闭环控制
Optimus 目前的步态控制策略是:根据行进路线生成「脚印」级别的每一步位置规划,再拆解 为对应路径下的抬脚和后跟落地动作,最后系统会计算得出机器人在对应动作下的可以保持动 态平衡的重心移动轨迹。而真实世界的环境要复杂得多。比如机器人自身会有抖动,传感器会 受到噪声干扰以及类似的种种。这些在运动规控栈计算之外的干扰会让原本的运动规划在执行 中发生偏差。 对于干扰和偏差等问题,Optimus 机器人在稳定检测系统中融入实时的环境感知反馈,并将稳 定系统通过环境检测得到的纠偏信号输出给运动控制系统,从而形成融入实时状态感知的闭环 控制,让机器人保持动态平衡。我们认为深度学习和数据积累下,相关技术如 FSD 有望持续迭 代,最终提升机器人运控能力。
2.2 人形机器人成本构成及零部件分析
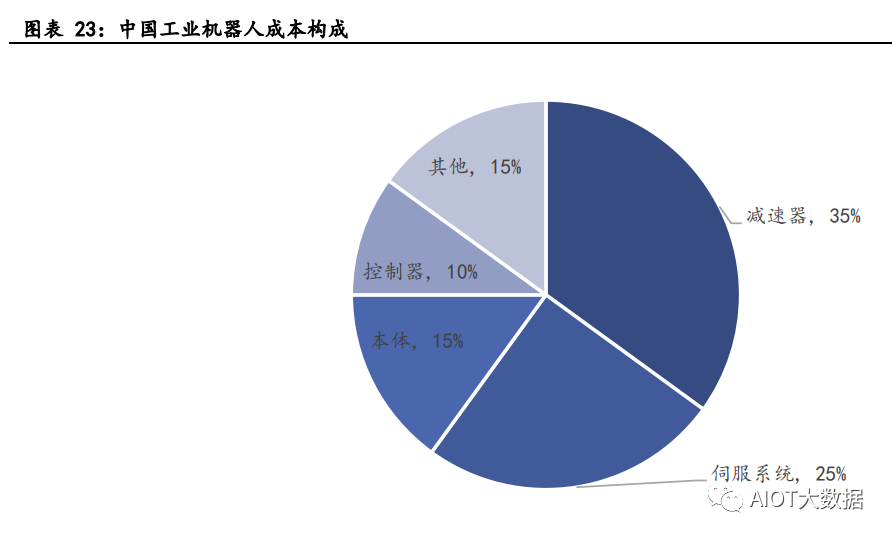
以产业化程度较高的工业机器人为例来看,工业机器人中技术难度最高的三大核心零部件分别 是减速器、伺服系统、控制器,三者分别占工业机器人成本构成的 35%、25%、10%。核心零部 件成本大约占到工业机器人整机成本的 70%左右。目前人形机器人产业化程度较低,考虑人形 机器人需要对感知能力要求较高,我们认为从硬件角度来看,电机驱动、减速器、传动设施及 传感器为人形机器人核心成本构成。
从产业链角度来看,人形机器人更接近智能服务机器人,上游关键零部件主要是伺服电机、传 感器、减速机等,中游主要是硬件集成和系统集成,对软件系统要求较高。由于特斯拉在软件 算法、部分核心零部件拥有较深的积淀,我们推测这块主要以特斯拉自研为主;硬件方面,考 虑规模效应和特斯拉降本需求,伺服电机、传动环节、减速机等环节有望依靠外部供应商提供 为主,而国产厂商在硬件成本端控制较好,结合特斯拉人形机器人未来售价目标,有望为国产 零部件厂商业绩带来增量空间。
躯干和手部是机器人主要活动关节,从特斯拉 Optimus 机器人硬件来看: 1)躯干:特斯拉 Optimus 共有 28 个运动关节,包括三种旋转执行器和三种线性执行器:其中 旋转关节采用电机+传感器+谐波减速器的方案;而线性关节采用电机+丝杠+传感器(从形 态上,我们推测是无框电机)。 2)手部:特斯拉机器人灵巧手采取了折中的方案,使用较为经典的六电机驱动方式,拇指采 用双电机驱动弯曲和侧摆,其它四指各用一个电机带动,电机采用蜗杆传动机构。从数量 来看,共 12 个驱动,手指部分我们推测是空心杯电机+驱动装置+传动装置构成。
三、国产零部件产业链有望受益
3.1 电机:核心零部件构成之一
3.1.1 空心杯电机:海外积淀深厚,国产厂商有望突破
空心杯电动机属于直流永磁的伺服、控制电动机,也可以将其归类为微特电机。空心杯电机 主要由后盖、接线端子、电刷端盖、电刷、换向器、杯形绕组(转子)、转轴、垫圈、滑动轴 承、外壳、磁铁(定子)、法兰、定位环组成。定子由永磁体、壳体、法兰组成。外壳提供了 恒定的磁场,使电机无铁损耗。没有软磁性牙齿。所产生的转矩是均匀的,即使在低速情况下 也能运行平稳。在较高的速度下,电机能减少振动,减少噪音。
分类方面,空心杯电机可以分为有刷和无刷两种,有刷空心杯电机转子无铁芯,无刷空心杯电 机定子无铁芯: 1)有刷空心杯电机:空心杯直流有刷微电机采用机械换向,磁极不动,线圈旋转。电机工作 时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换向 器和电刷来完成的。在转动的过程中会摩擦碳刷,造成损耗,需要定期更换碳刷。碳刷与 线圈接线头之间通断交替,会发生电火花,产生电磁破,干扰电子设备。 2)无刷空心杯电机:无刷空心杯直流电机采取电子换向,线圈不动,磁极旋转。无刷空心杯 直流电机,是使用一套电子设备,通过霍尔元件,感知永磁体磁极的位置,根据这种感知, 使用电子线路,适时切换线圈中电流的方向,保证产生正确方向的磁力,来驱动电机。因 为是自控式运行的,所以不会像变频调速下重载启动的同步电机那样在转子上另加启动绕 组,也不会在负载突变时产生振荡和失步。
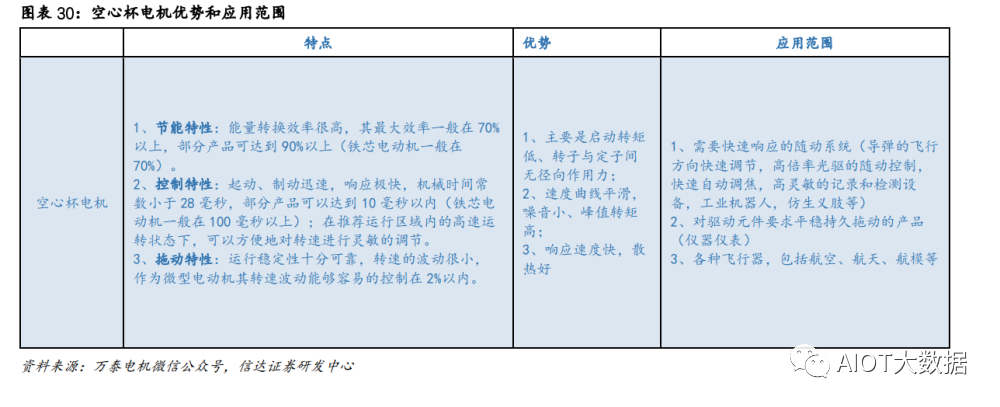
相比普通电机,空心杯电机具有能量转换效率较高,起动、制动迅速,响应较快和运行稳定性 可靠,转速的波动较小等优势,因此适合需要快速响应的系统,如导弹飞行方向快速调节,高 倍率光驱的随动控制,快速自动调焦,高灵敏的记录和检测设备,工业机器人,仿生义肢等。 在特斯拉人形机器人中,空心杯电机可以运用在手部,从而满足手部运动的快速响应需求。
海外厂商如瑞士的 MAXON、德国 Faulhaber 等企业深耕行业多年,行业地位较高。国内企业相 较海外厂商仍存在一定的技术差距,未来潜在发展空间大,主要原因是:1)相比普通电机, 空心杯电机由于少了铁芯支撑,对线圈要求较高;2)国内厂商更注重成本控制,缺乏对高端 技术的投入,导致技术水平相对滞后,同时在减速器等机械件上依然在追赶海外企业。我们认 为,在高端微型电机上,国内企业与海外依然存在差距,但以鸣志电器、江苏雷利为主的国内 企业也在不断进步,依托国产企业降本能力,有望在这块市场取得相应进展。
3.1.2 无框电机:国产企业有望凭借性价比优势加速突破
无框电机可以将定转子部件直接装配在机器中,便于终端产品的高度集成化,缩小体积。无 框架电机是传统电机中用于产生扭矩和速度的部分,但没有轴、轴承、外壳或端盖。无框电机 只有两个部件:转子和定子。转子通常是内部部件,由带永磁体的旋转钢圆环组件构成,直接 安装在机器轴上。定子是外部部件,齿轮外部环绕钢片和铜绕组,以产生紧密攀附在机器壳体 内的电磁力。
无框电机通常安装在先进的机器中,具有结构紧凑、易于维护等优势,可以提升机器性能。
无框电机可以运用在多种机器人和自动化领域,包括机器人、医药、机床、包装、印刷、加工 和通用自动化。在人形机器人领域,无框电机也有望发挥自身结构紧凑、性能较高的优势,在 机器人四肢等领域应用。
在市场格局方面,Kollmorgen,Moog,Maxon Motor,BEI Kimco,Woodward 和 Shinano Kenshi 等企业在市场占据优势地位,国产厂商如步科股份有望借助国产产业链成本优势,在市场份额 上取得突破。
3.2 减速器:人形机器人有望带动谐波减速器市场规模提升
减速器是连接动力源和执行机构的中间机构,具有匹配转速和传递转矩的作用。按照控制精度 划分,减速器可分为一般传动减速器和精密减速器。一般传动减速器控制精度低,可满足机械 设备基本的动力传动需求。精密减速器回程间隙小、精度较高、使用寿命长,更加可靠稳定, 应用于机器人、数控机床等高端领域。精密减速器种类较多,主流的包括谐波减速器、RV 减速 器等。
减速器主要分为谐波减速器、RV 减速器,谐波减速器具有小体积、低负载、高精度等特性, 更适合于人形机器人应用。
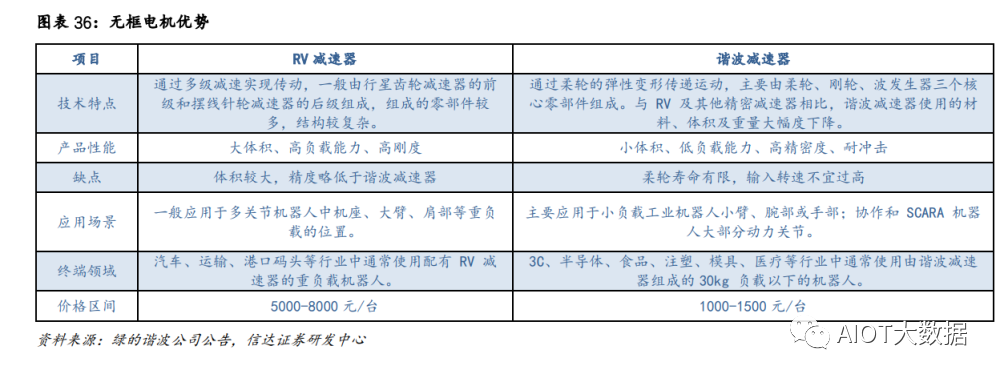
谐波减速器: 1) 构成:谐波齿轮减速器是一种靠波发生器使柔轮产生可控的弹性变形波,通过其与刚轮的 相互作用,实现运动和动力传递的传动装置,其构造主要由带有内齿圈的刚性齿轮(刚 轮)、带有外齿圈的柔性齿轮(柔轮)、波发生器三个基本构件组成。 2) 运行原理:谐波传动技术突破了机械传动采用刚性构件的模式,使用了一个柔性构件来实 现机械传动,其工作原理通常采用波发生器主动、刚轮固定、柔轮输出形式,当波发生器 装入柔轮内圆时,迫使柔轮产生弹性变形而呈椭圆状,使其长轴处柔轮齿轮插入刚轮的轮 齿槽内,成为完全啮合状态;而其短轴处两轮轮齿完全不接触,处于脱开状态,当波发生 器连续转动时,迫使柔轮不断产生变形并产生了错齿运动,从而实现波发生器与柔轮的运 动传递。
机器人为实现多自由度,其各个部位的控制均需在关节处搭载电机,故电机数量较传统工业机 械人有大幅提升。类比工业机器人,“电机+减速器”的集成逐渐成为移动机器人需要大角度旋 转的关节(以下简称“旋转关节”)的主要动力组合。随着移动机器人部分关节因体积、重量 等边界条件限制,需要采用轻量化的技术路径,谐波减速器凭借体积小、质量小、减速比大、 扭矩密度较高、轴向尺寸小等特点以及能在密闭空间、介质辐射的工况下正常工作等优点, “无框电机+双编码器+力矩传感器+谐波减速器”这类方案得到越来越多的应用。
市场规模方面,参考 QYResearch《全球精密减速器市场、结果和预测(2017-2028)》,2022 年 全球精密减速器市场规模为 28.3 亿美元,预计 2028 年将增长至 40.4 亿美元。精密减速器 制造对材料、设备、工艺等多个环节都有严格要求,具有明显的投资门槛高、技术难度大等特 点,行业壁垒高。竞争方面,日系品牌纳博特斯克、哈默纳科及日本住友占据主导地位。而我 国谐波减速器方面起步较晚,国内厂商如绿的谐波在减速比、输出转速、传动精度等方面已经 较国外有明显的差距收敛,未来市场份额有望提升。
3.3 丝杠:国产企业发展空间大
丝杆主要功能是将旋转运动转换成线性运动,或将扭矩转换成轴向反复作用力,同时兼具高精 度、可逆性和高效率的特点,所以其在精度、强度及耐磨性等方面都有很高的要求。特斯拉人 形机器人上应用行星滚柱丝杠将旋转运动转化为直线运动,主要使用在线性关节上。相比传统 丝杠,在性能上,行星滚柱丝杠凭借其在功率密度、速度、加速度、刚度等性能上的显著优势, 在航空航天、船舶装备、工业自动化、精密机床等领域有着广阔的应用前景。
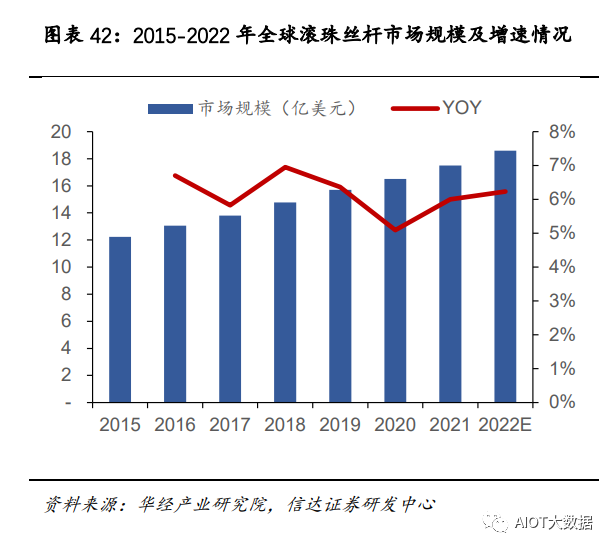
市场方面,丝杠产品主要以海外为主,以滚珠丝杠为例,2021 年全球主要的滚珠丝杆厂商有 NSK、THK、SKF 等,CR5 市占率达到约 46%,其中主要来自欧洲和日本,日本和欧洲滚珠丝杆企 业占据了全球约 70%的市场份额。而行星滚柱丝杠由于技术门槛更高,核心技术一直被欧美少 数几家厂商垄断。
国产化方面,江苏雷利(其控股子公司鼎智科技)经过多年研究,已经形成了自有丝杆生产体 系,产品质量对标美国 Roton 公司,可以实现全过程完全国产化,鼎智主要产品中,丝杆步进 电机已经形成了自有丝杆生产体系,产品质量逐步提升,并开始在国内 IVD 医疗器械领域进行 替代,随着公司产品技术的进一步成熟以及在医疗器械领域的进一步渗透,公司丝杆产品有望 在更大市场得到充分推广,拥抱更大成长蓝海。
-
nao机器人与其他机器人的区别2015-02-13 0
-
家用服务机器人将成为机器人的下一个入口2015-08-10 0
-
机器人与未来2015-12-29 0
-
中国的机器人发展光明前景2015-12-29 0
-
吐血推荐:详解喷涂机器人的术语及关键参数2016-01-06 0
-
全球机器人发展现状2016-01-28 0
-
C语言教学机器人2016-03-28 0
-
SA:服务机器人销量2022年将达3400万 扫地机器人需求大2016-12-28 0
-
不接地气的机器人终将消失,垂直应用场景的切入才能促进消费升级2018-05-23 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
工业机器人的技术原理2018-11-23 0
-
教育机器人方兴未艾,你了解多少?2018-12-20 0
-
机器人如何识别?2019-11-04 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
全球扫地机器人渗透率提升空间巨大,2025年渗透率将达到29%2021-01-19 6013
全部0条评论

快来发表一下你的评论吧 !
