

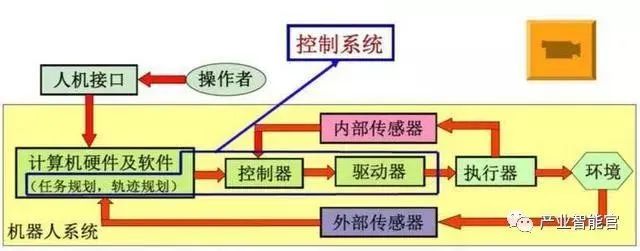
全面解读工业机器人基本主要构成部分
机器人
描述
工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,是靠本身动力和控制才能来实现种种功用的一种机器。它能够承受人类指挥,也能够按照事先编排的程序运转。今天我们讲讲工业机器人基本主要构成部分。
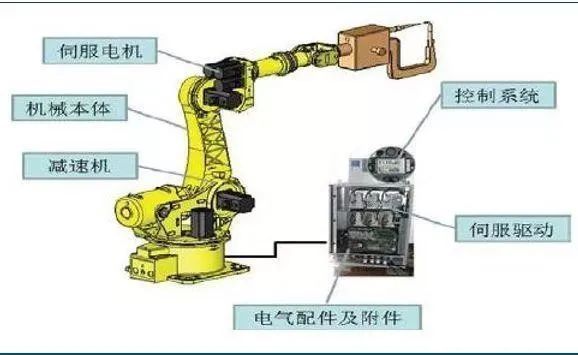
1.主体
主体机械即机座和实行机构,包括大臂、小臂、腕部和手部,构成的多自由度的机械系统。有的机器人另有行走机构。工业机器人有6个自由度乃至更多腕部通俗有1~3个活动自由度。

2.驱动系统
工业机器人的驱动系统,按动力源分为液压,气动和电动三大类。依据需求也可由这三种范例组合并复合式的驱动系统。或者通过同步带、轮系、齿轮等机械传动机构来间接驱动。驱动系统有动力装置和传动机构,用以实行机构发生相应的动作,这三类根本驱动系统的各有特点,现在主流的是电动驱动系统。 由于低惯量,大转矩交、直流伺服电机及其配套的伺服驱动器(交换变频器、直流脉冲宽度调制器)的普遍接纳。这类系统不需能量转换,运用方便,控制灵敏。大多数电机后面需安装精细的传动机构:减速器。其齿运用齿轮的速率转换器,将电机的反转数减速到所要的反转数,并得到较大转矩的装置,从而降低转速,添加转矩,当负载较大时,一味提升伺服电机的功率是很不划算的,能够在适宜的速率范畴内通过减速器来进步输出扭矩。伺服电机在低频运转下容易发热和出现低频振动,长时间和重复性的工作不利于确保其准确性、牢靠地运转。精细减速电机的存在使伺服电机在一个适宜的速率下运转,加强机器体刚性的同时输出更大的力矩。如今主流的减速器有两种:谐波减速器和RV减速

3.控制系统
机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。工业机器人控制技术的主要任务便是控制工业机器人在工作空间中的活动范围、姿势和轨迹、动作的时间等。具有编程简单、软件菜单操纵、友好的人机交互界面、在线操纵提示和运用方便等特点。 控制器系统是机器人的中心,外国有关公司对我国实验紧密封闭。连年来随着微电子技术的开展,微处置器的功能越来越高,而价钱则越来越便宜,现在市集上曾经出现了1-2美金的32位微处置器。
高性价比的微处置器为机器人控制器带来了新的开展机会,使开辟低本钱、高功能的机器人控制器成为可能。为了使系统具有充足的运算与存储能力,现在机器人控制器多接纳较强的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片构成。 由于已有的通用芯片功用及功能上不可以完全满足有些机器人系统在价钱、功能、集成度和接口等方面的要求,这就萌生了机器人系统对SoC(Systemon Chip)技能的需求,将特定的处置器与所需求的接口集成在一同,可简化系统外围威廉希尔官方网站 的设计,减少系统尺寸,并低低成本。比方,Actel公司将NEOS或ARM7的处置器内核集成在其FPGA产品上,构成了一个完整的SoC系统。在机器人技术控制器方面,其研讨主要会合在美国和日本,并有成熟的成品,如美国DELTATAU公司、日本朋立株式会社等。其运动控制器以DSP技术为核心,采用基于PC的开放式结构。
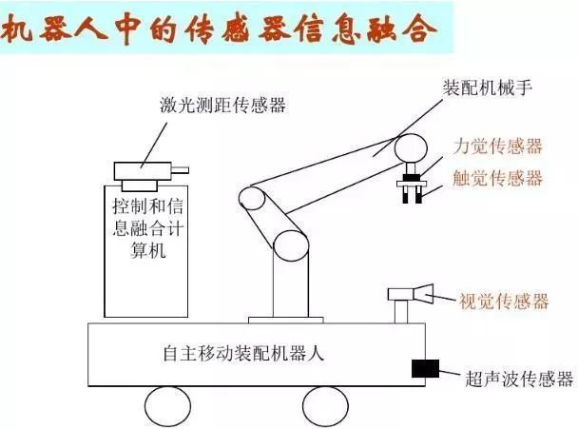
4.感知系统
它是内部传感器模块和外部传感器模块的构成,获取内部和外部的环境状态中有意义的信息。 内部传感器:用来检测机器人本身状态(如手臂间的角度)的传感器,多为检测位置和角度的传感器。具体有:位置传感器、位置传感器、角度传感器等。 外部传感器:用来检测机器人所处环境(如检测物体,距离物体的距离)及状况(如检测抓取的物体是否滑落)的传感器。具体有距离传感器、视觉传感器、力觉传感器等。 智能传感系统的使用提高了机器人的机动性,实用性和智能化的标准,人类的感知系统对外部世界信息是机器人灵巧的,然而,对于一些特许的信息,传感器比人的系统更加有效。
5.末端执行器
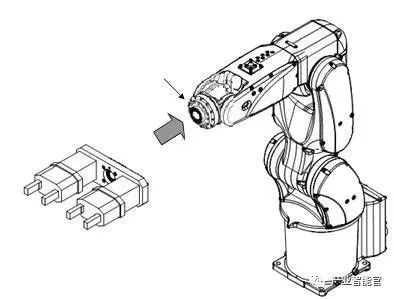
末端执行器连接在机械手最后一个关节上的部件,它一般用来抓取物体,与其他机构连接并执行需要的任务。机器人制造上一般不设计或出售末端执行器,多数情况下,他们只提供一个简单的抓持器。通常末端执行器安装在机器人6轴的法兰盘上以完成给定环境中的任务,如焊接,喷漆,涂胶以及零件装卸等就是需要机器人来完成的任务。
伺服电机的概述
伺服驱动器又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位。
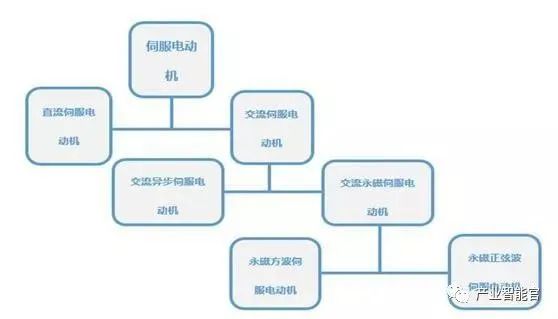
一、伺服电机的分类
分为直流和交流伺服电动机两大类,交流伺服电动机又分为异步伺服电动机和同步伺服电动机,目前交流系统正在逐渐代替直流系统。与直流系统相比,交流伺服电机具有高可靠性、散热好、转动惯量小、能工作于高压状态下等优点。因为无电刷和转向器,故交流私服系统也成为无刷伺服系统,用于其中的电机是无刷结构的笼型异步电机和永磁同步型电机。 1)直流伺服电机分为有刷和无刷电机 ①有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对使用环境有要求,通常用于对成本敏感的普通工业和民用场合; ②无刷电机体积小重量轻,出力大响应快,速度高惯量小,力矩稳定转动平滑,控制复杂,智能化,电子换相方式灵活,可以方波或正弦波换相,电机免维护,高效节能,电磁辐射小,温升低寿命长,适用于各种环境。
二、不同类型伺服电机的特点
1)直流伺服电机的优点和缺点 优点:速度控制精确,转矩速度特性很硬,控制原理简单,使用方便,价格便宜。 缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜) 2)交流伺服电机的优点和缺点 优点:速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可实现恒力矩,惯量低,低噪音,无电刷磨损,免维护(适用于无尘、易爆环境)。
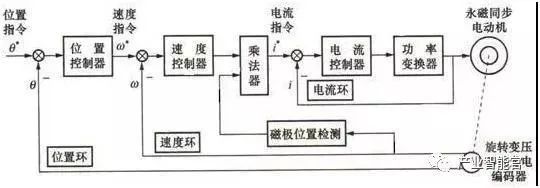
缺点:控制较复杂,驱动器参数需要现场调整PID参数确定,需要更多的连线。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动威廉希尔官方网站 ,IPM内部集成了驱动威廉希尔官方网站 ,同时具有过电压、过电流、过热、欠压等故障检测保护威廉希尔官方网站 ,在主回路中还加入软启动威廉希尔官方网站 ,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流威廉希尔官方网站 对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑威廉希尔官方网站 是三相全桥不控整流威廉希尔官方网站 。
三、伺服系统接线图
1. 驱动器接线

伺服驱动器主要有控制回路电源、主控制回路电源、伺服输出电源、控制器输入CN1、编码器接口CN2、连接起CN3。控制回路电源是单相AC电源,输入电源可单相、三相,但是必须是220v,就是说三相输入时,咱们的三相电源必须经过变压器变压才能接,对于功率较小的驱动器,可单相直接驱动,单相接法必须接R、S端子。伺服电机输出U、V、W切记千万不能与主威廉希尔官方网站 电源连接,有可能烧毁驱动器。CN1端口主要用于上位机控制器的连接,提供输入、输出、编码器ABZ三相输出、各种监控信号的模拟量输出。 2. 编码器接线

从上图看出九个端子我们只使用了5个,一个屏蔽线、电源线两根、串行通讯信号(+-)两根,与我们普通的编码器接线差不多。 3. 通讯端口
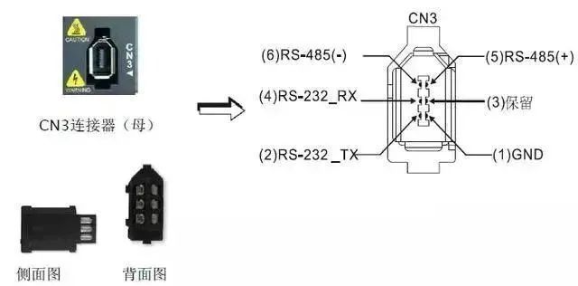
驱动器通过CN3端口与电脑PLC、HMI等上位机相连接,采用MODBUS通讯来控制驱动器,可使用RS232、RS485进行通讯。
四、伺服驱动器市场
机器人对关节驱动电机的要求非常严格,交流伺服电机在工业机器人中得到广泛应用。目前国内高端市场主要被国外名企占据,主要来自日本和欧美,未来国产替代空间大。目前国外品牌占据了中国交流伺服市场近80%的市场份额,主要来自日本和欧美。其中,日系产品以约50%的市场份额居首,其著名品牌包括松下、三菱电机、安川、三洋、富士等,其产品特点是技术和性能水平比较符合中国用户的需求,以良好的性价比和较高的可靠性获得了稳定且持续的客户源,在中小型OEM市场上尤其具有垄断优势。 精密减速器 最近看了一则新闻:机器人产业要破除“卡脖子”难题,感触挺深。随着人工成本的提高,工业机器人替换人已成为趋势。工业机器人作为智能制造的基石,但核心零部件却制约着我国机器人产业的发展,据相关调查显示目前国内机器人减速器普通依赖进口。机器人产业在中国要成气候,必须下决心解决核心零部件的问题。
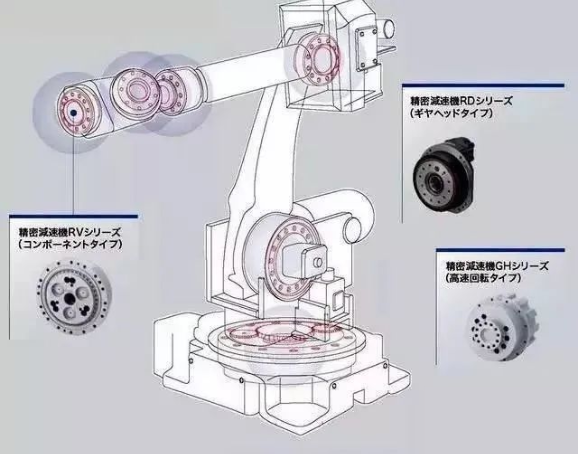
下面介绍工业机器人核心精密零部件:减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。减速器行业,我们不得不提这行业两巨头是Nabtesco(帝人,也叫纳博特斯克)和Hamonica Drive(哈默纳科),业界俗称(RV减速器和谐波减器)。他们几乎垄断了全球的机器人用减速器。这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。目前市面上的大量应用在工业机器人上的减速器主要有两类:RV减速器和谐波减速器。
RV减速器:是少齿差啮合,但相对于谐波减速器,RV减速器通常用的是摆线针轮,RV减速器由摆线针轮和行星支架组成。相比谐波减速器,RV减速器的关键在于加工工艺和装配工艺。RV减速器具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。RV减速器用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV减速器。 它较机器人中常用的谐波传动具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低,故世界上许多国家高精度机器人传动多采用RV减速器,因此,该种RV减速器在先进机器人传动中有逐渐取代谐波减速器的发展趋势。
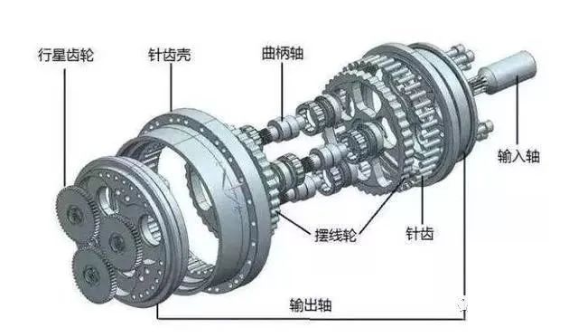
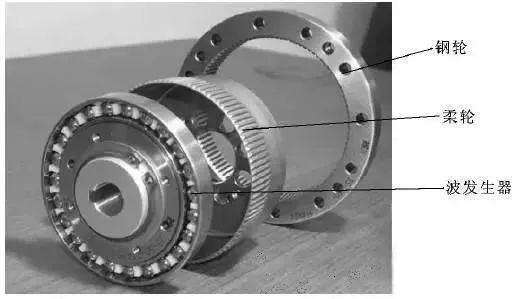
RV减速器分解图 谐波减速器:用的也是少齿差啮合,谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。 谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、和径向变形的波发生器三者组成。它是利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。这种传动与一般的齿轮传递具有本质上的差别,在啮合理论、集合计算和结构设计方面具有特殊性。谐波齿轮减速器具有高精度、高承载力等优点,和普通减速器相比,由于使用的材料要少50%,其体积及重量至少减少1/3。所以谐波减速机主用于小型机器人,特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。一般用于负载小的工业机器人或大型机器人末端几个轴。
谐波减速器分解图 日本纳博特斯克公司从1980年代初提出RV型设计到1986年RV减速器研究获得实质性突破,花了6-7年时间;而国内率先拿出结果的南通振康和恒丰泰花费时间也为6-8年。是不是意味着我国本土企业就没什么机会了呢!可喜的是中国企业布局若干年后,终于取得一些突破。国产主要由南通振康、秦川机床、武汉精华、浙江恒丰泰和浙江双环传动提供。据说南通振康产量已经突破万台,秦川机床生产线已经打通,产量正在逐步上升。秦川机床的是国家进口替代项目,秦川机床9万套工业机器人关节减速器技术改造项目、工业机器人关节减速器生产线两项合计投资3.14亿元。 控制系统 机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。下面文章主要介绍机器人控制系统。

1、机器人的控制系统 “控制”的目的是指被控对象会按照者所期望的方式产生行为。“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。
2、机器人的基本工作原理 工作原理是示教再现;示教也称导引示教,既是人工导引机器人,一步步按实际需求动作流程操作一遍,机器人在导引过程中自动记忆示教的每个动作的姿态、位置、工艺参数、运动参数等,并自动生成一个连续执行的程序。完成示教后,只需要给机器人一个启动命令,机器人将会地自动按照示教好的动作,完成全部流程;
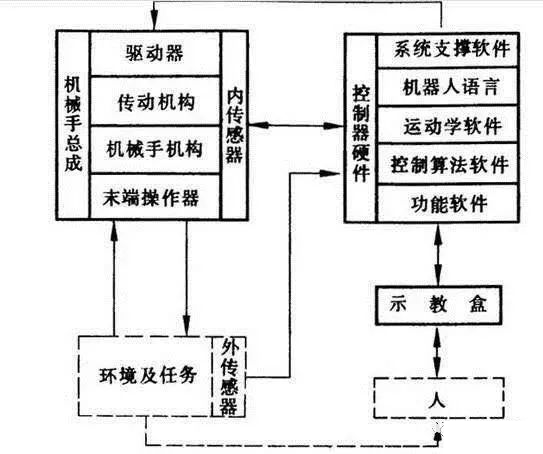
3、机器人控制的分类 1)按照有无反馈分为:开环控制、闭环控制、 开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。 2)按照期望控制量分为:力控制、位置控制、混合控制这三种。 位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制 多关节位置控制分为分解运动控制、集中控制力控制分为:直接力控制、阻抗控制、力位混合控制 3)智能化的控制方式 模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制 4、控制系统硬件配置及结构 .电气硬件 .软件架构 由于机器人的控制过程中涉及大量的坐标变换和插补运算以及较低层的实时控制。所以,目前市面上机器人控制系统在结构上大部分采用分层结构的微型计算机控制系统,通常采用的是两级计算机伺服控制系统。
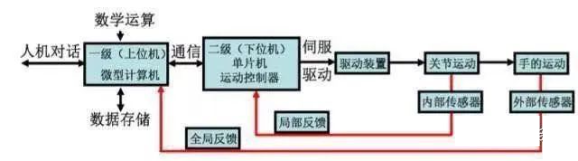
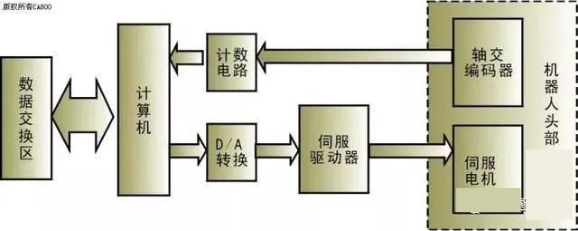
1)具体流程: 主控计算机接到工作人员输入的作业指令后,首先分析解释指令,确定手的运动参数。然后进行运动学、动力学和插补运算,最后得出机器人各个关节的协调运动参数。这些参数经过通信线路输出到伺服控制级,作为各个关节伺服控制系统的给定信号。关节上的伺服驱动器将此信号D/A转换后驱动各个关节产生协调运动。 传感器将各个关节的运动输出信号反馈回伺服控制级计算机形成局部闭环控制,达到精确的控制机器人在空间的运动。
2)基于PLC的运动控制 两种控制方式: ①利用PLC的输出端口使用脉冲指令来产生脉冲驱动电机,同时使用通用I/O或者计数零部件来实现伺服电机的闭环位置控制 ②使用PLC外部扩展的位置控制模块来实现电机的闭环位置控制,这种方式主要是以发高速脉冲控制,属于位置控制方式,位置控制一般都是点到点的位置控制方式较多。 机器人重要参数
机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。

1、自由度 是指机器人具有的独立运动的坐标轴数量。 机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数量。机器人的自由度数一般等于关节数量。 常见机器人自由度数一般有5~6个。有些机器人还附带有外部轴。 2、关节(Joint) 即运动副,允许机器人手臂各零件之间发生相对运动的机构。
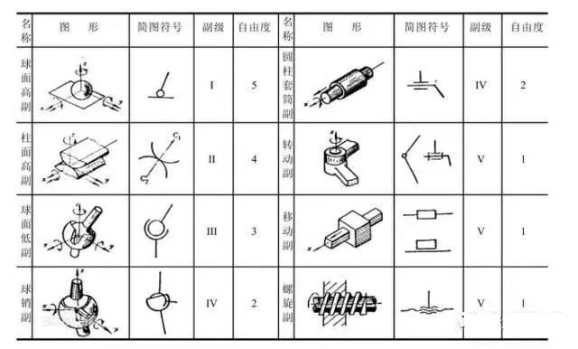
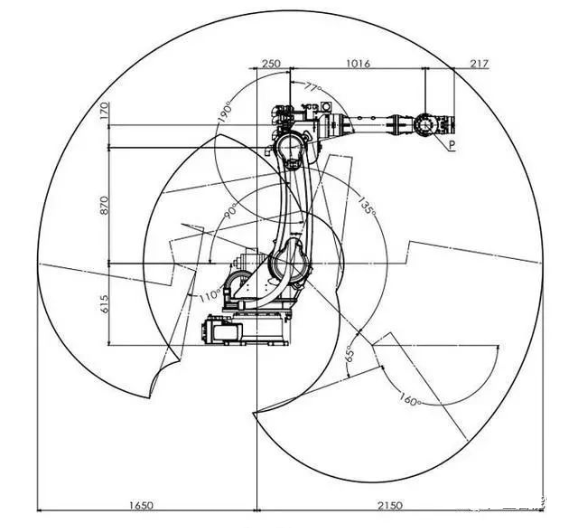
3、工作范围 工业机器人手臂或手部安装点所能达到的所有空间范围。 其形状取决于机器人的自由度数和各运动关节的类型与配置。机器人的工作范围一般有:图解法和解析法这两种方法表示。
4、速度 机器人在工作过程中带载荷条件下、匀速运动过程时,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。 5、工作负载 是指机器人手腕前端安装负荷在工作范围内任何位置上所能承受的最大重量,一般用质量、力矩、惯性矩表示。 还和运行速度和加速度大小等参数有关,工作负载一般用高速运行时机器人所能抓取的工件重量作为负载承受能力为指标。 搬运机器人的负荷重量,必须考虑抓手和工件的合计。

6、分辨率
是指机器人能够实现的最小移动距离或最小转动角度 。 7、精度 重复性或重复定位精度:指机器人重复到达某一目标位置的差异性。比如你要求一个轴走 100 mm 结果 第一次 实际上他走了 100.01 重复一次同样的动作 他走了99.99 这之间的误差 0.02 就是重复定位精度。它是衡量一列误差值的集中程度,即重复度。机器人精度机不单取决与关节减速机及传动装置,且对机械装配工艺存在很大关系,很多由于装配不到位导致机器人重复定位精度下降。
编辑:黄飞
-
什么是工业机器人2015-01-19 0
-
如何系统性地学习工业机器人技术?2016-03-06 0
-
六轴工业机器人的主要特点2017-08-08 0
-
工业机器人的产业链2017-08-23 0
-
工业机器人应用广泛2017-09-07 0
-
零基础玩转工业机器人2018-10-29 0
-
工业机器人的技术原理2018-11-23 0
-
工业机器人由哪些主要部件构成2020-05-13 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
关于工业机器人的知识汇总2021-10-11 0
-
PDF——工业机器人技术及应用2022-10-16 0
-
工业机器人的构成_工业机器人的分类2020-03-28 5795
-
工业机器人的构成与分类2023-02-02 1845
-
工业机器人的基本构成2023-03-24 3315
-
工业机器人的机械部分主要包括什么2024-06-16 1336
全部0条评论

快来发表一下你的评论吧 !
