

基于Camera-IMU的标定算法原理
工业控制
描述
在vio系统中,camera-imu间内外参精确与否对整个定位精度起着重要的作用。所以良好的标定结果是定位系统的前提工作。
目前标定算法主要分为离线和在线标定,离线标定以kalibr为代表,能够标定camera内参、camera-imu之间位移旋转、时间延时以及imu自身的刻度系数、非正交性等。
本文基于kalibr[2]整体框架,介绍标定算法原理。
相机投影模型
这里以常用的针孔相机投影为例,而畸变模型包括最常见rantan、equidistant两种。对于其他投影、畸变模型可查阅相关资料,这里不详细叙说。对于空间中3D点怎样投影得到像素平面2D坐标:
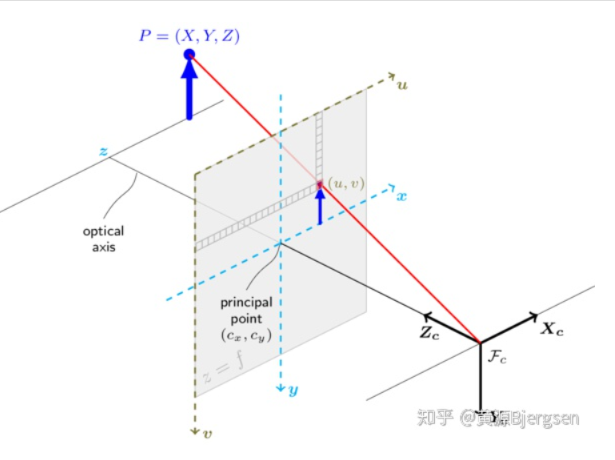
由上图,可以看到空间三维点  由三角形相似,可以简单计算出来像素平面坐标
由三角形相似,可以简单计算出来像素平面坐标  。实际投影成像过程不想上图那么简单,主要包含三步:
。实际投影成像过程不想上图那么简单,主要包含三步:

上图第二步以rantan畸变为例,对于equidistant畸变模型则是另外一种形式:
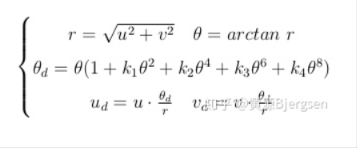
投影过程首先是算出归一化平面上点,然后再对归一化平面上点加rantan、equidistant畸变,最后再作用于内参焦距、主点,得到成像像素点坐标。
camera内参标定
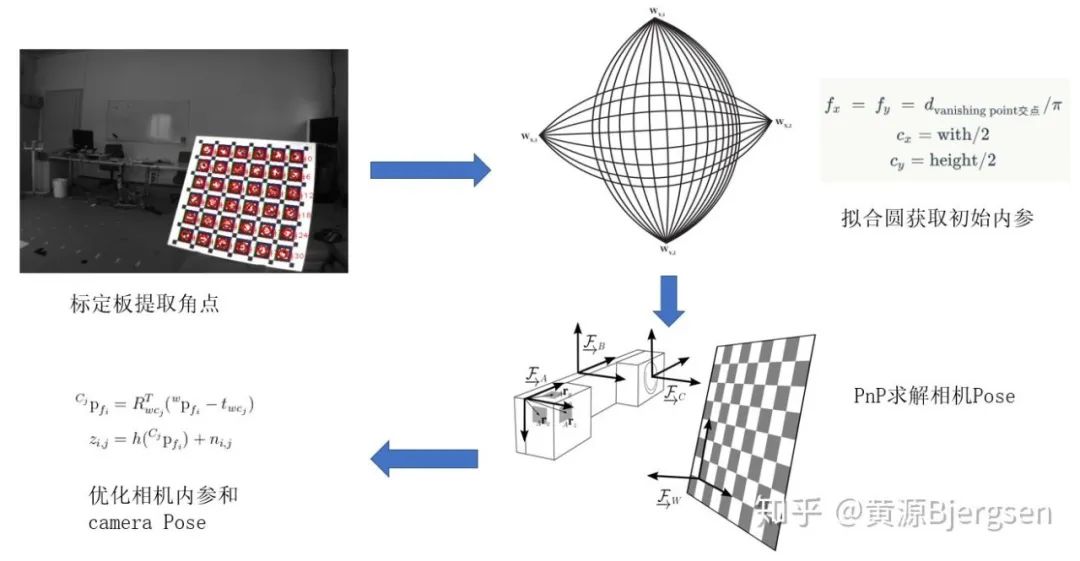
camera内参标定如上图所示,可以简单概括为四步:
1. 从图像中提取标定板角点。根据标定板类型,常见三种:checkboard、april grid和circle grid,每一种都有各自提取角点的方法,具体可查询相关资料。
2. 对于一个非线性优化问题,往往需要有一个不错的初始值。对于主点坐标 、 可以简单地初始化为图像尺寸的1/2。焦距部分参考[4],即真实世界平行的直线经过成像投影之后,不再是平行的,相交于两点(有的地方称作vashing point)。所以对标定板每一行的点,都可以在图像上拟合一个圆,两个圆交点的距离除以 即可得到焦距初始值。
3. 把标定板作为固定参考坐标系,因为标定板尺寸已知,这样就知道每一个角点在这个参考坐标系下3D坐标。知道3D-2D的对应,即可求解出每一帧camera的pose,这个pose会作为后续优化的变量。
4. 通过每一帧相机的pose把参考坐标系下3D点转换到相机坐标系下,通过相机的投影模型,即可得到标定板3D角点在图像平面上的预测投影位置。通过优化每一帧相机的Pose和相机内参,来让所有的重投影误差最小。
这样即完成相机的内参标定。
B-spline
已知一些离散的点,怎样用一条连续光滑曲线来把它们串联起来。比较容易想到是贝赛尔曲线,
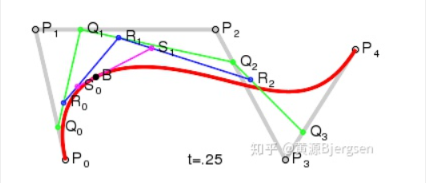
用一个高阶的多项式,附上多项式系数,即可算出每一时刻的曲线值:

但是这样存在一个问题,为了让拟合的曲线和离散点尽可能吻合,需要不断增加这个多项式的阶数,这样可能带来计算耗时增加。而且有时候调整曲线上某一段,可能会动上整个曲线。
为了结局这个问题,B-spline采用了一个更加聪明方法。把整个曲线分很多段
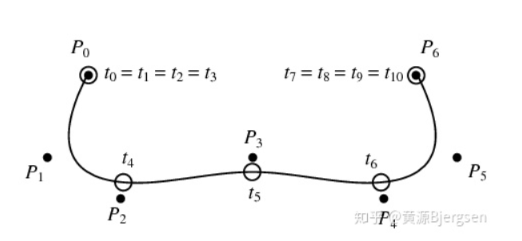
每一段采用一个不同的多项式,而这个多项式系数采用了一种递归的方式来计算:
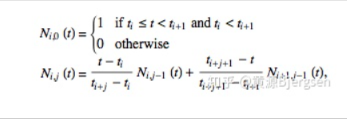
这样带来一个问题,就是每一时刻曲线值只与这一段前p个控制系数有关,这个p是样条的阶数。

最左边的是p个列向量组成的矩阵,每一列  是要优化的样条系数。中间
是要优化的样条系数。中间  矩阵维度
矩阵维度  ,是个固定常量,只与整个b-spline knot时间分布有关。最右边是p行列向量,其形式为:
,是个固定常量,只与整个b-spline knot时间分布有关。最右边是p行列向量,其形式为:
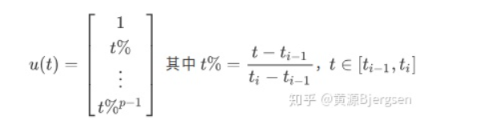
只和位于这个曲线段时间点有关。这样就很容易对每一时刻的样条值求一阶导、二阶、多阶导等等,这个对于后面camera-imu外参标定非常重要。
camera-imu外参标定
知道imu测试每一时刻加速度和角速度,对加速度、角速度进行积分可以得到速度、位置、旋转。不同于SLAM中对离散imu数据进行积分得到状态可能带来较大的误差,采用对时间连续的状态求导来反推imu数据。把离散的状态描述成连续的就需要B-spline。
camera-imu外参标定大体上分为三步:
1、粗略估计camera与imu之间时间延时。
2、获取imu-camera之间初始旋转,还有一些必要的初始值:重力加速度、陀螺仪偏置。
3、大优化,包括所有的角点重投影误差、imu加速度计与陀螺仪测量误差、偏置随机游走噪声。
粗略估计camera与imu之间时间延时
上面相机内参标定,可以先标定出camera的内参。现在已知每一帧图像的3D-2D对应,可以算出每一帧camera的pose。用这些离散的pose构造连续的B-spline,就可以获取任意时刻pose。
注意这里对pose参数化采用六维的列向量,分别三维的位移  和旋转矢量
和旋转矢量  。对位移和旋转矢量分别求一阶导、二阶导可以得到速度与加速度:
。对位移和旋转矢量分别求一阶导、二阶导可以得到速度与加速度:
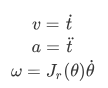
利用camera的样条曲线获取任意时刻camera旋转角速度,而陀螺仪又测量imu的角速度。忽略偏置和噪声影响,两者相差一个旋转,且模长相等:
这样用camera和imu测量出来角速度随时间原始曲线:
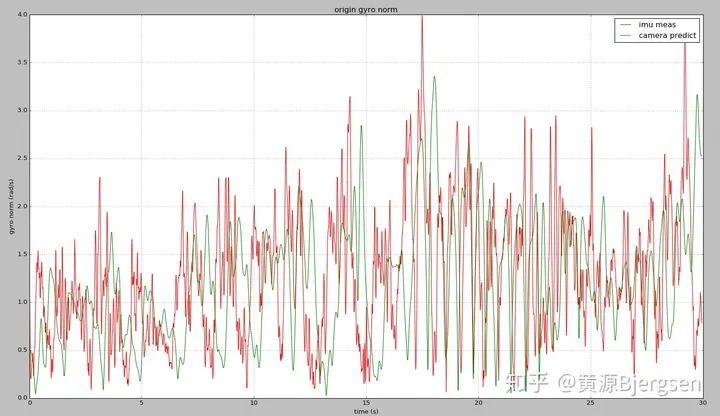
现在利用两个曲线的相关性,可以粗略估计imu和camera时间延时:
对齐后曲线则是下面这样:
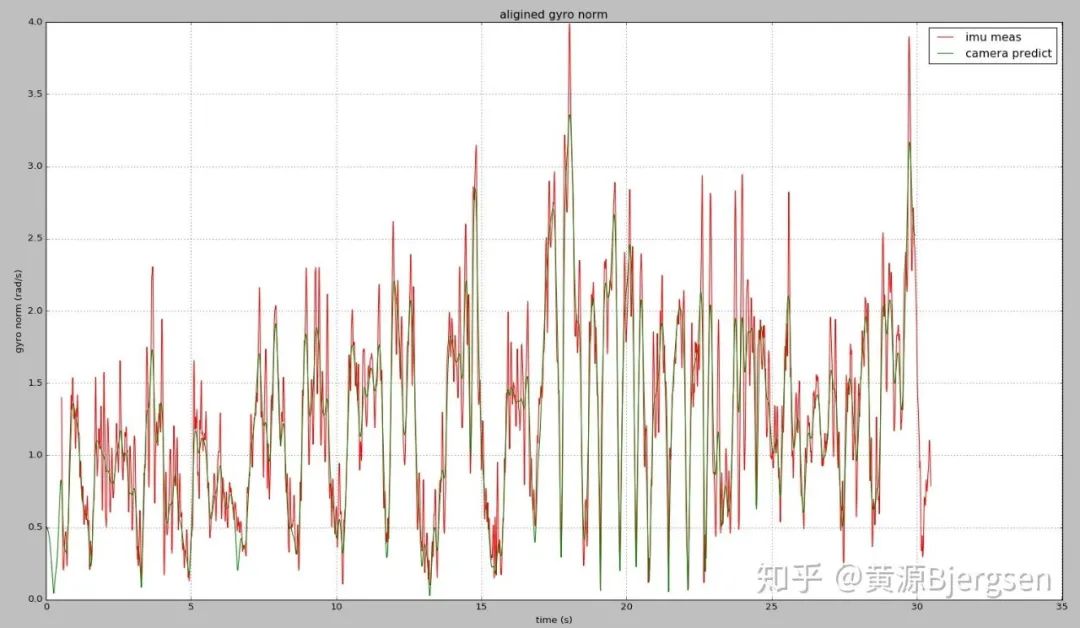
可以看到利用相关性,可以把时间延时误差缩小到1-2个imu周期范围内。
获取imu-camera之间初始旋转,还有一些必要的初始值:重力加速度、陀螺仪偏置
同样利用角速度测量关系,这次构造一个优化问题:

这样就可以获得camera-imu之间的旋转,以及陀螺仪偏置初始值。
忽略加速度偏置与噪声,假设整个标定过程中平均加速度为零,所以也可以获得重力加速度在参考坐标系下的表示:
大优化,包括所有的角点重投影误差、imu加速度计与陀螺仪测量误差、偏置随机游走噪声
前面两步为最后大优化提供一个不错的初始值,接着大优化就是调整所有要优化的变量来让所有的观测误差最小。
误差项包括所有标定板角点重投影误差、imu加速度计与陀螺仪测量误差、偏置的随机游走噪声(相对特殊点)。
为了简化imu测量误差的构建,这里利用camera pose  乘上上面计算出来外参[
乘上上面计算出来外参[  , 0],得到imu的pose
, 0],得到imu的pose  曲线。当然这个曲线可能误差比较大,会在后续优化过程中进行调整。
曲线。当然这个曲线可能误差比较大,会在后续优化过程中进行调整。
特征角点的重投影误差:
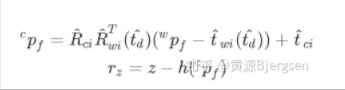
这里带  表示要优化的参数,
表示要优化的参数,  即上面相机投影模型,
即上面相机投影模型,  、
、  由imu状态计算camera状态时需要考虑camera-imu间时间延时。
由imu状态计算camera状态时需要考虑camera-imu间时间延时。
陀螺仪、加速度计测量误差:
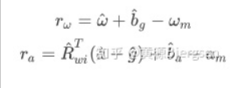
 、
、  分别对样条值旋转 、位移 部分对时间求一阶、二阶导可得。
分别对样条值旋转 、位移 部分对时间求一阶、二阶导可得。  模长固定,只优化方向。
模长固定,只优化方向。
偏置随机游走噪声:
如果假设上述偏置  、
、  随时间变化,则需要添加偏置随机游走噪声:
随时间变化,则需要添加偏置随机游走噪声:

所以像pose曲线一样,需要分别对加速度偏置和陀螺仪偏置生成一个样条曲线,只不过对于样条上初始值加速度偏置设为0,陀螺仪偏置为第二步估计的初始值。
在非线性最小二乘中,不同于角点重投影误差、imu的测量误差,在整个cost fuction中,只需要对单个测量误差项求和:
而偏置随机游走误差需要对一段时间内进行积分[3]:
至此加入外参标定过程中所有的误差项。优化的量包括:
1、camera-imu外参部分包括位移  、旋转 、时间延时
、旋转 、时间延时 
2、重力加速度
3、各个时间节点的  、
、 
4、各个时间节点的 、
其中1、2为常量,3、4为随时间变化的量。构造整个优化problem即可完成camera-imu的外参标定。
imu内参标定
对于一些廉价的imu设备,加速度计、陀螺仪本身可能存在三个轴非正交,以及每个轴存在刻度系数误差,实际的加速度计测量方程就是这样的形式:
对于陀螺仪,除了存在非正交性、刻度系数误差,还额外加速度计敏感项、以及加速度计与陀螺仪三轴之间角度误差:

为了估计imu器件本身内参,只需要在外参标定过程中,替代其对应的测量模型即可,参考[1]。
内外参标定工作思考
评估一个算法好坏大体上分两个指标:效率与精度。通过一些技巧能够提高标定的效率。但是对于精度部分,做标定工作时候,往往不知道设备的准确值,或者能拿到可能就设备结构设计值来作为参考,所以评估算法标定精度也是一件棘手的问题。
编辑:黄飞
-
车载SINS/GPS组合导航系统的在线标定算法2010-04-24 0
-
Labview-多项式标定算法2015-08-19 0
-
请问IMU和AHRS算法用stm32如何实现?2019-04-19 0
-
四轴基础算法学习——IMU输入滤波算法2019-06-11 0
-
IMU误差来源/表达式/标定2020-12-24 0
-
如何使用imu_utils工具生成IMU的Allan方差标定曲线?2021-11-22 0
-
传感器标定系统的自动采样算法2009-06-25 462
-
遗传算法的单目相机标定2018-01-05 726
-
基于交叉熵算法的跟驰模型标定2019-01-11 1006
-
基于CP-132UL V2的标定测试软件实现完成对IMU的标定工作2020-08-13 1256
-
基于灰狼算法的相机标定优化方法及分析2021-05-31 742
-
张正友标定算法是什么意思2022-08-22 3109
-
IMU测量原理与标定算法的实现2023-06-02 5267
-
常用视觉的三种相机标定总结2023-10-09 2161
-
IMU/GNSS与车体外参标定2023-11-20 1600
全部0条评论

快来发表一下你的评论吧 !
