

怎么个视觉定位呢?视觉加伺服的旋转定位技术
工业控制
描述
项目准备
客户需求:
套印(侧面),伺服+视觉=旋转定位。
工件:直径32mm左右,侧面各种图案字符都有
实验器材:
1 .汇川AM401,SV660/400w伺服一套。 (1000.00+650.00)
2. 咸鱼购买的200W CCD摄像头一套,含现线材,镜头。 (650.00)
3 .咸鱼购买光源控制器1个,(OPT,据说是个牌子,好找资料)(100.00)
4 .2个条形光源。(只是为了便宜)(40.00)
5 .咸鱼购买的实验架一套。 (150.00)
6 .客户帮忙做的伺服电机底座,工装。
7 .客户提供的工件若干。
8 .咸鱼购买的8口千兆交换机一个,菲尼克斯,大牌子,逼格高~ (140.00)
以上物品有些是以前买的,有些是玩视觉配的。
目的很单纯,只是为了多赚钱。也算是兴趣把。
以上物品有些是以前买的,有些是玩视觉配的。
目的很单纯,只是为了多赚钱。也算是兴趣吧。
软件:隆重安利一下一款免费的,还有技术支持的视觉软件,白嫖怪们,快上。
SGVision 请自行百度~,不少人还在咸鱼售卖,真的是人才啊,
软件基本搭好了!
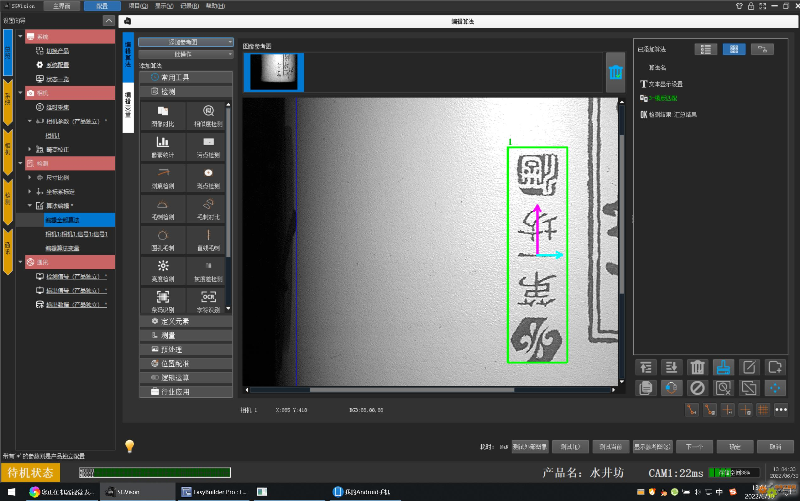
软件支持以下通讯:(本例用的modbus_tcp)

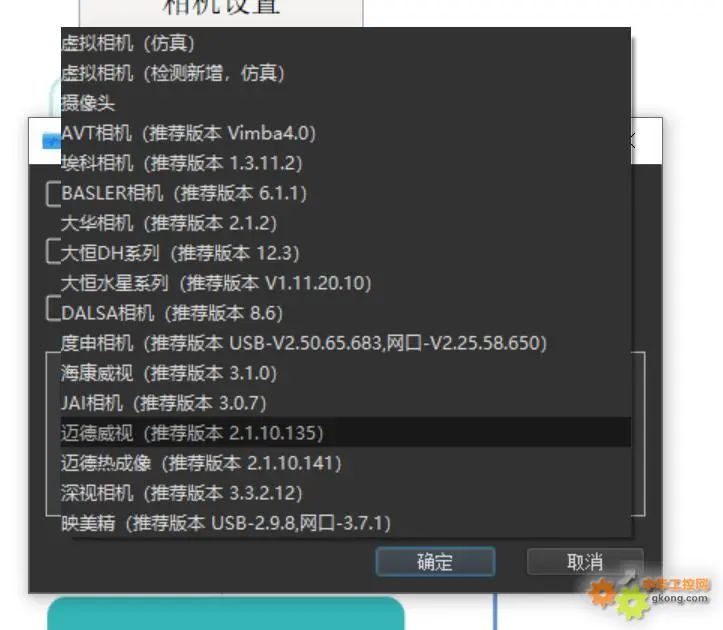
相机支持以下:(笔记本的USB摄像头都支持,很强。)
以前用过基恩士CV系列的视觉,感觉,还行吧,但是贵啊,硬件是专用的,光源都是一套的,一个字,贵!
国产大佬推出的,SGVision ,纯免费(ID需要注册+认证,就可以激活软件,加密狗99一个,苍天啊,白嫖&99.00),各种常用的工件都有,测尺寸,判断相似度这些。
反正比自己用啥啥啥开发节省很多时间。
但是:用过基恩士就知道基恩士的好,有些功能还没有,毕竟免费,白嫖,能用能用,(据说快要出新版本了,应该会慢慢更强把)
ps:大佬注册账号的时候,推荐那里,可以填写我的ID啊,bnnyygy ,我就赚个脸熟,没经济利益。
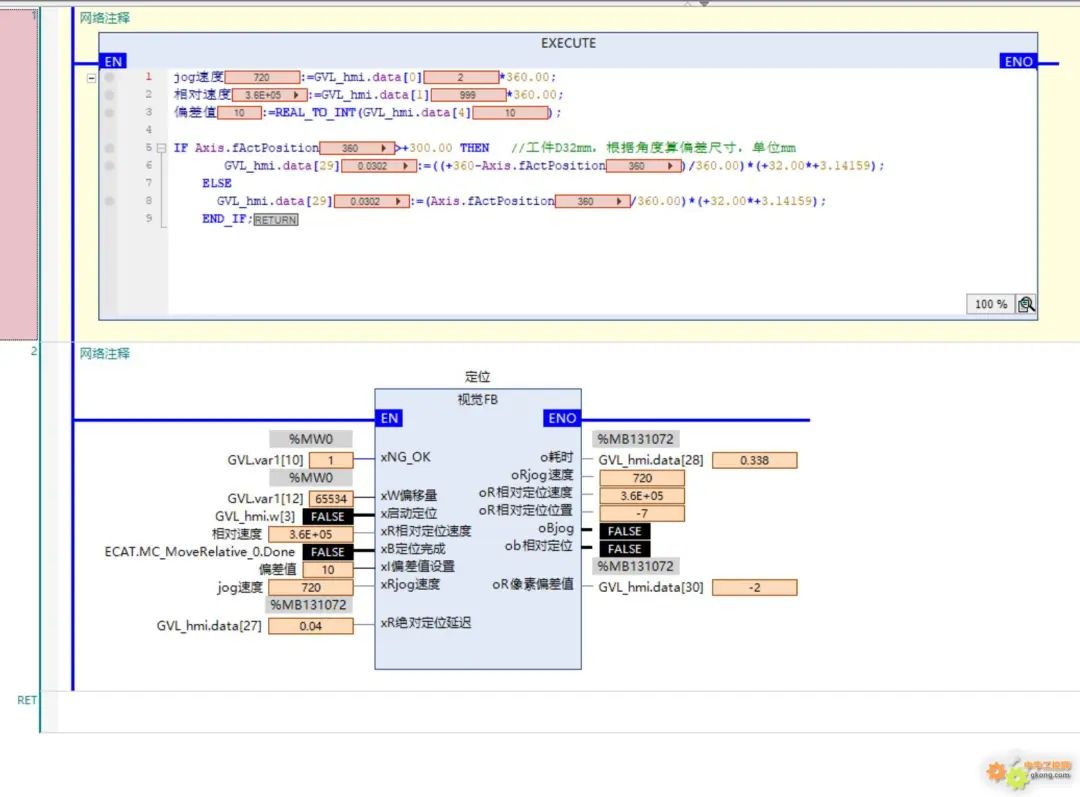
怎么个视觉定位呢?
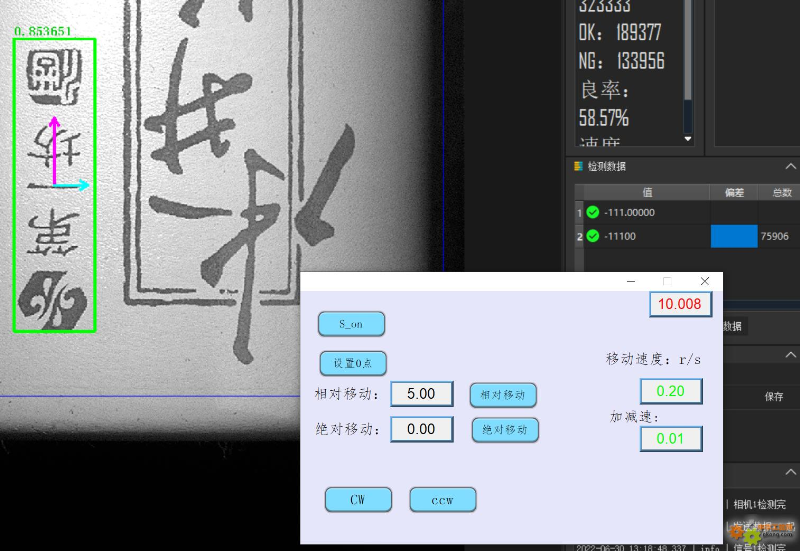
此处还没编写PLC程序,PLC只能S_ON伺服,归零,JOG,绝对,相对运动。
视觉软件和PLC通讯OK,只用了一个工具(模板匹配)输出一个变量,就是字符和模板的像素点距离(X轴),Y轴不需要,工件不会前后移动。
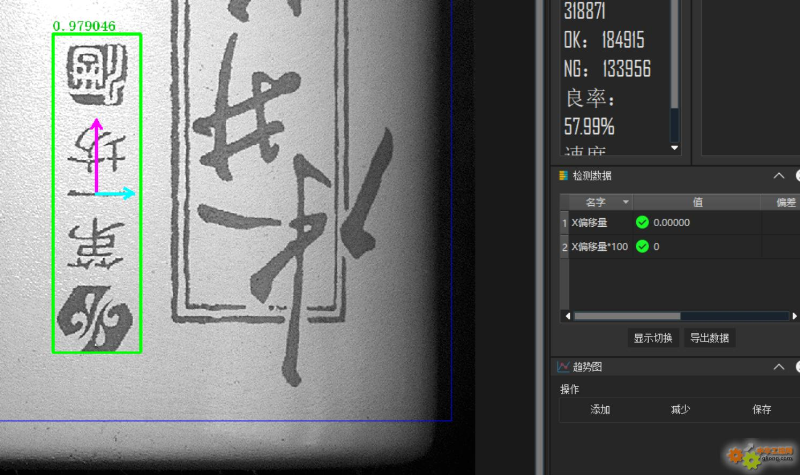
这个时候,模板,图案像素点距离是0
伺服旋转模式0~360度
伺服相对运动了5度(威纶通在线模拟出镜~)像素点-57.00
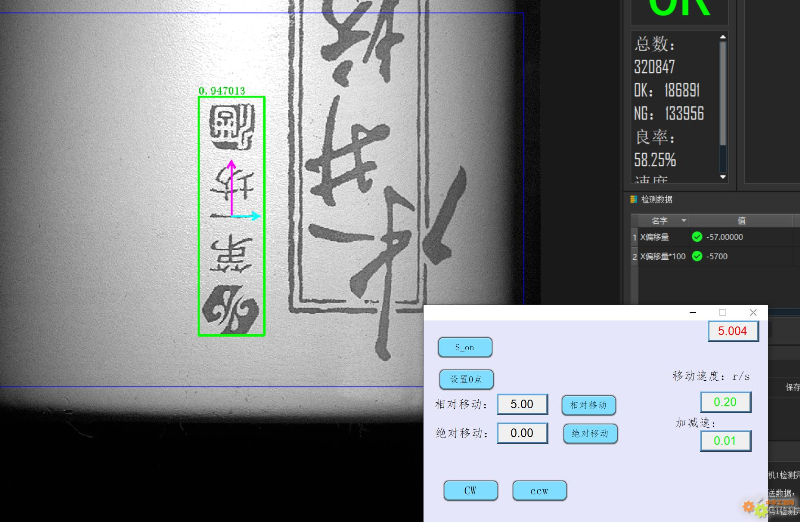
继续相对移动5度(10度绝对位置),像素点-111.00
现场拍照是个啥样呢?照片揭晓。

相机在上方,工件在下面(拍照的是工件侧面)。
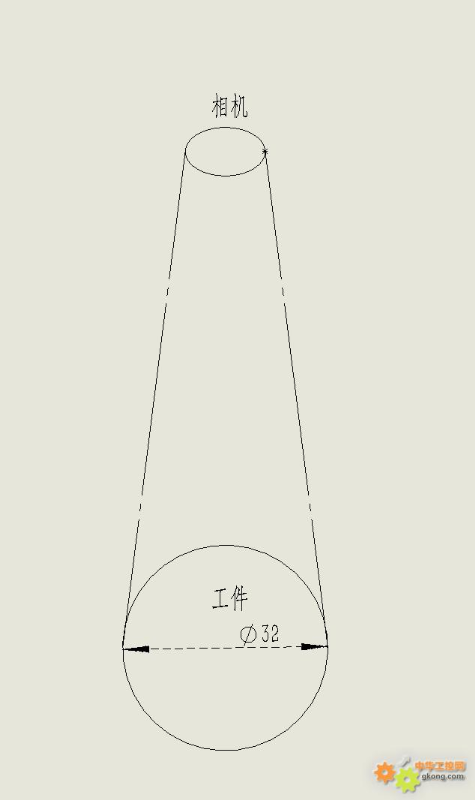
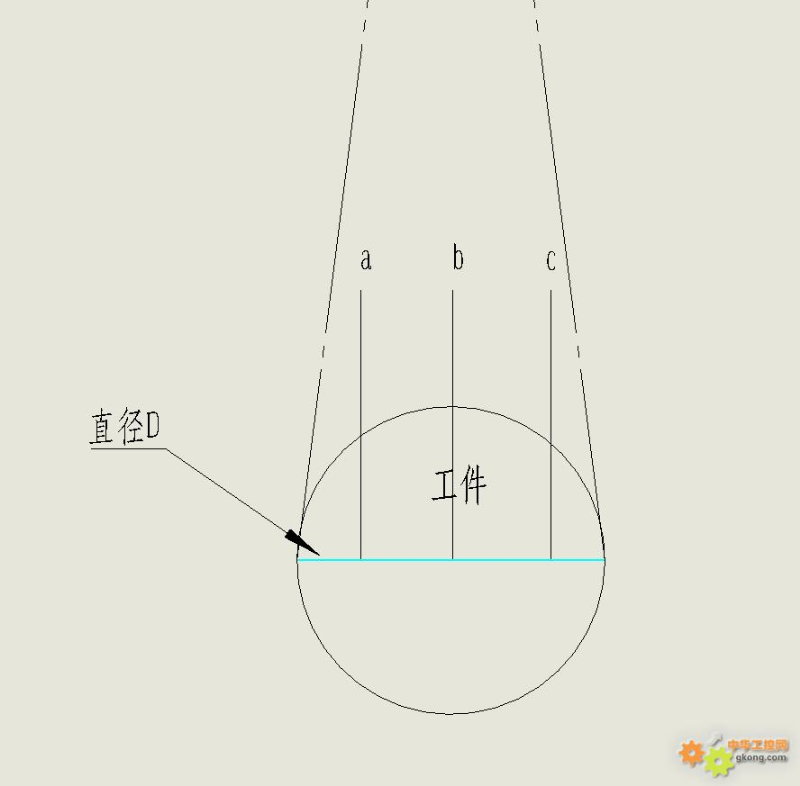
有个问题,侧面是弧形的
垂直看下去,a b c 3点,视觉只能识别到平面像素点位置,并不能反映弧形是多长(角度),但是能算,知道半径,知道字符X位置,直角回到2条边,另外一条就出来了,角度也能算出来。
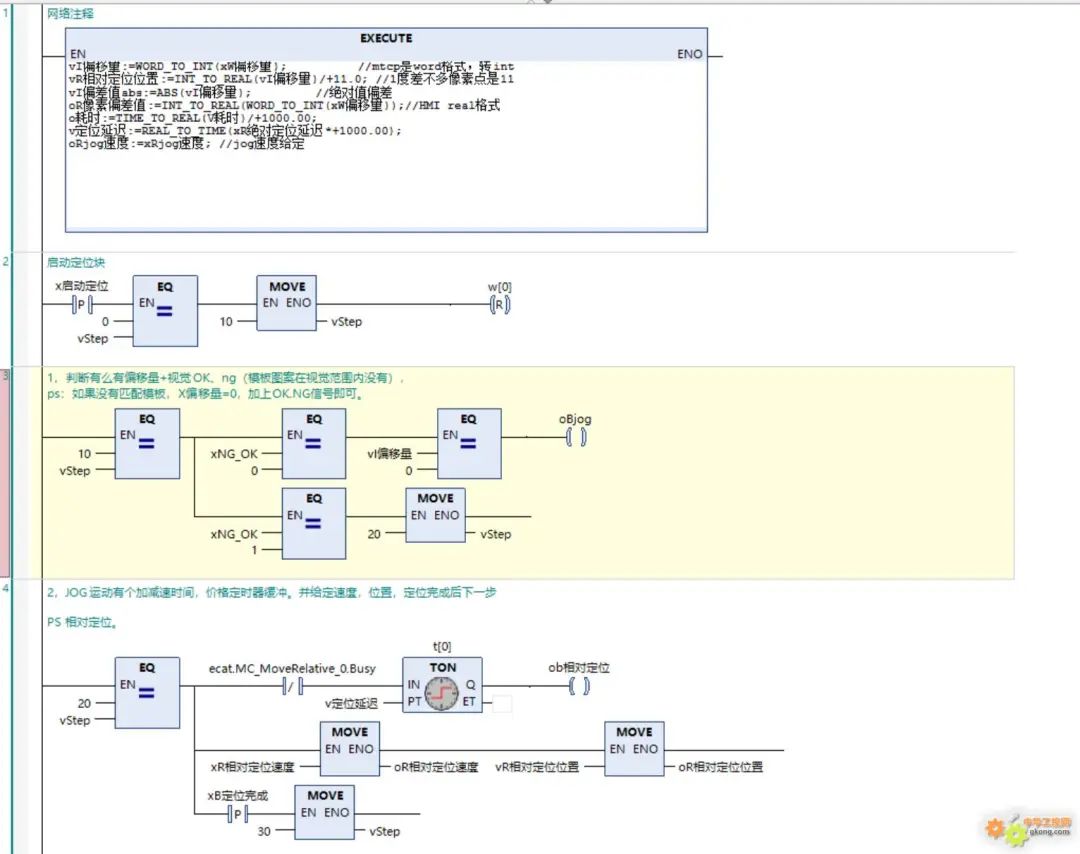
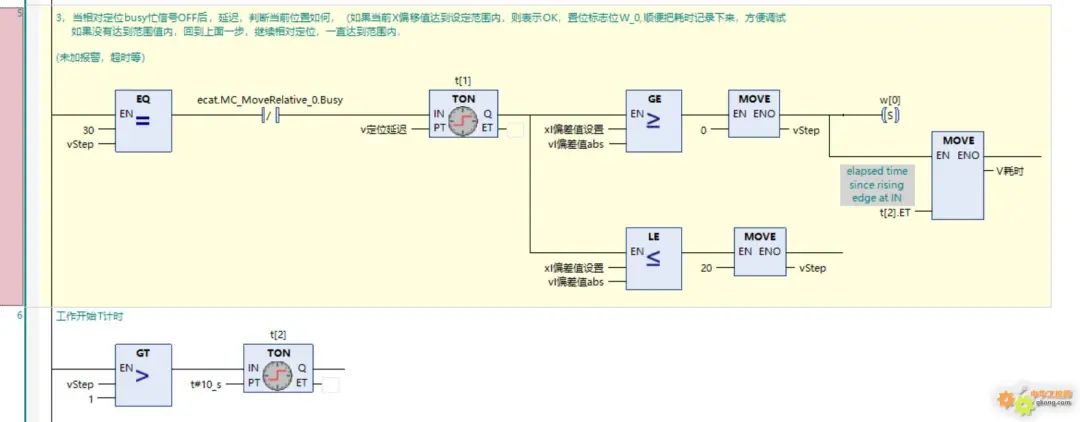
逻辑粗想:
视觉软件是实时检测输出的。
判断有么有偏移量(模板图案在视觉范围内没有),没有,到第二步
JOG运行(一个方向),当检测到偏移量 不等于0,表示有字符了,到第三步
ps: 相机全分辨率,刷新率是27左右(1秒钟刷新27次)37ms能刷新一次,加上通讯延迟(之前我发帖问过),JOG速度不能太快,但是太慢影响效率
JOG停止有个减速时间,等待0.2S,伺服停稳,根据视觉偏移量计算差多少(粗略按系数0.1计算)
做绝对移动比如像素点521,相对移动-52.1.定位完成,到第四步,
ps:定位速度可以给快一些。
伺服停稳以后,像素点相差肯定更少,再根据偏移量做个相对移动。
判断像素点值(在范围内表示定位OK,反之NG)
初样来啦!
程序逻辑如下:(实际非常Nice)
编辑:黄飞
-
基于嵌入式的视觉伺服循迹定位系统设计2012-08-20 0
-
视觉定位技术咨询2018-08-03 0
-
机器人视觉系统组成及定位算法分析2019-06-08 0
-
视觉定位,旋转平移的问题:2019-09-01 0
-
【HarmonyOS HiSpark AI Camera】视觉定位2020-11-23 0
-
求 视觉定位-------旋转中心的最佳算法2021-06-11 0
-
视觉定位方案求助,谢2021-10-05 0
-
四元数数控:深圳机器视觉引导定位是什么?2021-11-24 0
-
视觉定位原理:对极几何与基本矩阵2018-01-23 6194
-
体育器械视觉定位检测应用2020-05-22 1727
-
医疗器械视觉定位应用2020-05-22 2293
-
视觉感知定位技术首个国家标准正式发布2022-11-14 866
-
浅谈机器视觉检测技术和机器视觉定位技术2023-05-08 531
-
机器视觉检测与机器视觉定位的区别与应用2023-05-30 1060
-
激光焊接视觉定位引导方法2024-05-28 520
全部0条评论

快来发表一下你的评论吧 !
