

影响伺服系统性能的因素有哪些
工业控制
描述
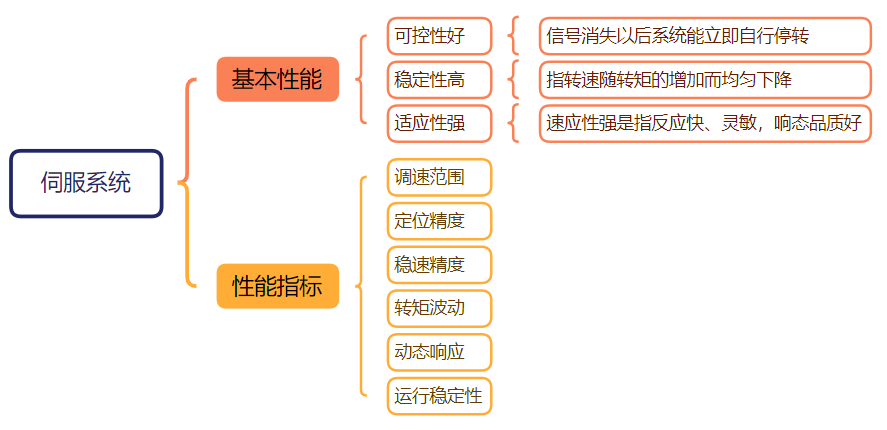
伺服系统必须具备可控性好、稳定性高和适应性强等基本性能。交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、转矩波动、动态响应和运行稳定性等方面来衡量。
调速范围是指电机的最高转速与最低平稳转速之比。低档的伺服系统调速范围在1∶1000以上,一般的在1∶5000~1∶10000,高性能的可以达到1∶100000以上。定位精度取决于编码器的脉冲数与驱动器对编码器的倍频细分数,例如2048线的编码器,在其倍频数为2048的条件下,理论定位精度可以达到360°/(2048×2048)。 过去在测量技术比较落后的情况下,用户还采取附加措施来提高系统的精度,例如将测量元件(如自整角机)的测量轴通过减速器与转轴相连,使转轴的转角得到放大,来提高相对测量精度。采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称为精读数通道,直接取自转轴的测角线路称为粗读数通道。稳速精度,尤其是低速(比如速度给定1r/min时)下的稳速精度,一般在±0.1r/min以内,高性能的可以达到±0.01r/min以内。通常情况下,一些驱动器还以其额定转速的百分数来作为速度精度,例如西门子伺服驱动器的理想速度精度通常为其额定转速的0.001%。
转矩波动也是衡量伺服系统性能的指标,它是由驱动器、电机以及负载共同决定的。性能优良的伺服系统其转矩波动要求在±3%的范围内。通常,衡量动态响应的指标是系统最高响应频率和上升时间。上升时间指当速度设定点突然变化到实际速度稳定在设定值±2%的范围的时间,其中包括系统的死区延迟。最高响应频率即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90°或者幅值不小于71%(-3dB)。如图所示,X(t)与Y(t)信号分别为系统的输入与输出。
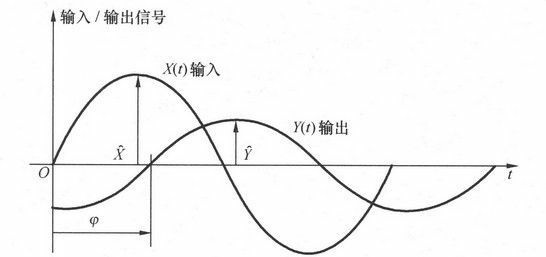
时域范围内的信号曲线
另外,从频域上分析,系统的带宽反映伺服系统跟踪的快速性。带宽越大,快速性越好。根据速度闭环的伯德图,可以得到系统的带宽。伺服系统的带宽主要受控制对象和执行机构的惯性的限制,惯性越大,带宽越窄。通常情况下,伺服系统的带宽会随着功率范围的增加而变小。目前大部分产品的速度频带在200~500Hz,少数产品可以达到更高,如三菱伺服电机MR-J3系列的响应频率声称可高达900Hz。
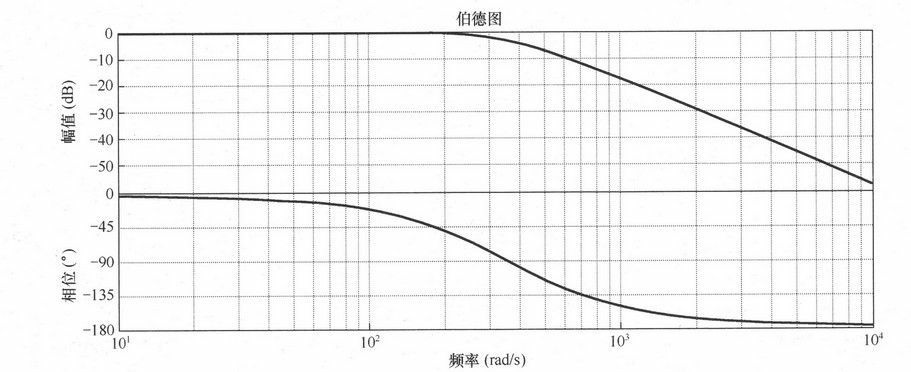
速度闭环的伯德图
运行稳定性主要是指系统在电压波动、负载波动、电机参数变化、上位控制器输出特性变化、电磁干扰以及其他特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。这方面我国产品(包括部分台湾产品)和世界先进水平相比差距较大。
影响伺服系统性能的因素

(1)电机
电机是伺服系统的重要组成部分,电机执行能力的好坏将决定整个伺服系统的控制特性。常见的伺服电机可以分为直流调速电机与交流调速电机。和直流电机相比,交流伺服电机没有直流电机的换向器和电刷等带来的缺点。同时,电机的转动惯量、转子阻抗、电刷结构以及散热等都会影响伺服系统的性能。
(2)编码器
编码器作为控制的反馈元件,也是影响系统精度的重要因素。首先,编码器的脉冲数会直接影响系统的定位和速度控制精度;其次,编码器的最高转速也制约电机的最大转速。目前,用于伺服控制系统的编码器通常为光电编码器,分为增量式、绝对值、正余弦以及旋转变压器等类型。编码器的抗干扰能力会给系统的稳定性带来直接的影响。对于永磁同步电机,正确的转子位置识别也是控制的前提,因此,编码器能提供给驱动器正确的转子位置,也是控制的关键。
(3)驱动器
驱动器是伺服控制的核心。根据电机类型的不同,驱动器也分为不同的种类,如晶体管放大驱动器、直流驱动器及交流驱动器,目前工控行业比较常见的是交流驱动器。例如,西门子公司推出的Sinamics S120驱动器,其实是通过SPWM方式来控制电机的,其控制方式是空间矢量控制。通常情况下,电流环与速度环都是在驱动器中实现的,而位置控制可以在运动控制器中完成,也可以在驱动器中实现。电流环与速度环的闭环特性是衡量一个控制系统性能的标准,如电流环与速度环的采样周期,速度环与电流环的带宽,控制回路上的各种滤波、延迟等,都会影响系统的精度与动态响应能力。
(4)运动控制器
运动控制是在驱动器的速度环基础上,增加了位置控制、齿轮同步、凸轮、插补等运动控制功能的控制方式。 运动控制器对驱动器的控制方式有3种,即数字通信方式、模拟量方式、脉冲方式。
①数字通信方式:分辨率高,信号传输快速、可靠,可以实现高性能的灵活控制,需要通信协议。例如,西门子的Simotion与驱动器之间的数据交换采用基于Profibus或Profinet的Profidrive协议。还有其他一些欧系公司采用CAN总线的方式,日系安川公司推出了基于MECHATROLINK总线的驱动产品,通过以上的总线方式,实现了传动与运动控制器之间的数据传输控制,特别适合于需要各轴间的协调同步和插补控制的应用,除了实现机械所必需的转矩、位置、速度控制功能以外,还可实现要求精度极高的相位协调控制等。
②模拟量方式:分辨率低,信号可靠性与抗干扰性能差,但兼容性好。例如,西门子的运动控制器Simotion与第三方驱动器之间的控制可以通过模拟量的方式来实现。
③脉冲方式:可靠性高,快速性差,灵活性差。驱动对象为步进电机。
在系统选型配置过程中,运动控制器对驱动器的控制方式是设计者需要考虑的重要因素。通信是最稳定、快捷的控制方式,同时要考虑通信的传输速度。通信周期受通信速率与数据量大小的制约,以西门子的运动控制器Simotion为例,在传输速率为1.5Mbit/s的情况下,控制6个以上的轴时,系统的通信周期默认为3ms。同时,受通信周期的限制,运动控制器的插补周期与位置环采样周期通常为通信周期的整数倍。对于运动控制器来说,其插补周期与位置环采样周期是衡量系统性能的关键。
(5)机械传动
电机通常靠机械传动结构(如联轴器、齿轮箱、丝杠、传送带、机械凸轮等)与负载相接。这样,联轴器的刚性、齿轮间隙、传送带的松紧都会影响系统的控制精度。例如,对于直线移动的执行部件,电机通常靠同步皮带轮或者丝杠进行连接,同步皮带轮的啮合间隙或者丝杠螺母的滚珠与滚道间隙等,都会对直线运动位移精度造成影响。而对于机械凸轮,必须保证速度或加速度边界条件,才能使系统不至于产生机械谐振。
(6)负载
作为控制的最终对象,负载对系统性能的影响也不可忽略。负载的转动惯量的大小会影响系统的动态特性,如转动惯量大,其加速与停止过程中会要求系统的输出扭矩大,要求驱动器的驱动能力高。另外,负载与电机的转动惯量比也会影响系统的性能,转动惯量比越小,控制越容易,但电机的效率越低;惯量比大,会给系统的高频带来谐振点,从而增加控制难度。关于负载与电机惯量比的分配,可以参考BoschRexroth公司给出的“适配标准” :快速定位<2∶1,修正定位<5∶1,高速率变换<10∶1。
转动惯量

概念
转动惯量是表征刚体转动惯性大小、衡量刚体抵抗旋转运动的惯性的物理量。其地位相当于刚体平动中的质量,它与刚体的质量以及质量相对于转轴的分布有关。
物理意义
直接理解转动惯量比较抽象,但是我们可以用我们最常见、最直观的质量来做类比。
如果我们用同样的力在两个质量不同的物体上作用,质量重的那个物体速度变化慢。因此质量的物理意义为可以反映出物体平动状态下的惯性:质量越大,则惯性越大,即越难改变平动运动时它的运动状态(从静止开始,质量大的物体比质量小的物体更难被加速)。
同理,如果我们用同样的力矩(使物体平动的叫力,使物体转动的叫力矩)作用在物体上想让它转动,不同的物体转动的角速度变化(类似于平动中的加速度)的快慢也不同,影响角速度变化快慢的这个因素就是转动惯量。即转动惯量反映物体转动下的惯性:转动惯量大的物体角速度难于被改变。
公式
其中: 为刚体的转动惯量, 是每一个微元的质量, 为每一个微元到转轴的距离。
1、相同质量的物体,质量的分布(每一个微元距转轴的距离)如果不同,其转动惯量也不同。
2、质量分布均匀的物体,质量不同其转动惯量也不同。
平动和转动中物理量关系

(7)安装
待上述对象都得到确认后,现场装置的安装也会给整个系统带来新的问题,比如如何做好系统的接地,如何避免EMC干扰,使用合适的屏蔽电缆等,都是系统设计不可忽视的问题。例如,在编码器的电缆屏蔽层没有真正接地的情况下,反馈信号会夹杂着噪声,这种噪声对控制的精度有很大的影响,甚至会导致装置停机。
(8)系统的成套性
在整个运动控制系统的设计中,建议使用者尽可能采用同一厂家的产品,包括运动控制器、驱动器、伺服电机等,保证系统的成套性,因为这样能够避免如连线、配置、通信等方面的问题。单独购买各部件所带来的问题首先是连接顺序的复杂化,电机、驱动终端和反馈设备(包括编码器、分解器、霍尔传感器等)可以有多种不同的连接次序。采用同一供应商的电机和驱动器还有一个好处,就是能更好地安装、调试软件,并确保其兼容性 。另外,每一款电机的参数都不一致,与其匹配的驱动器都有其默认参数,从电机参数的识别方式来看,驱动器也有专有的识别方式。对于第三方电机,驱动器所能够识别的程序可能不够准确;而在精密的运动控制系统中,一个参数的差别可能会影响电机的驱动性能,从而影响控制精度。因此,建议用户尽量采用同一厂家的配套产品。 了解更多伺服与运动控制行业资讯,添加小编微信,更多福利资料等你领取~
审核编辑:黄飞
-
数控机床的伺服系统2008-12-30 1300
-
进给伺服系统2009-02-16 647
-
伺服系统介绍2011-07-10 2532
-
液压伺服系统的工作特性及原理2012-02-09 8090
-
伺服系统的组成2016-04-26 871
-
伺服系统的发展及其在机电设备中的应用2017-10-31 934
-
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成2018-03-27 19296
-
伺服系统什么意思_伺服系统的作用是什么2018-04-28 34056
-
伺服系统应用于哪儿_伺服系统应用实例2018-05-31 16367
-
交流伺服系统的分类及应用场合2023-03-07 1529
-
机电伺服系统有哪些_机电伺服系统工作原理2023-03-07 2067
-
伺服系统原理及分类2023-08-27 3076
-
伺服系统特性测试方法2023-11-08 899
-
影响伺服系统稳态速度精度的因素2024-07-29 641
全部0条评论

快来发表一下你的评论吧 !
