

使用PLC来实现闭环控制 选择何种控制方式非常重要
工业控制
描述
一些闭环运动控制的应用很显然需要运动控制器,然而一些人也可以通过使用PLC来实现闭环控制。当然,选择何种控制方式常常难以定论。
当你可以使用PLC控制的时候,为什么还需要花钱去购买一个专用的电液运动控制器呢?答案很简单。一般来说,考虑的因素包括使用数量,实现难度,可用时间,生产效率,精度要求以及经济性等。做出何种决定往往是很模糊的。根据以往的经验,我知道哪种类型的应用可以用PLC,哪种不适用。
对于大多数的控制系统设计者来说,成本是首当其冲的想法。最简单的办法就是购买带有模拟量输入和输出的PLC用于各种轴的控制,还可以带有一些数字I/O,接着就可以编程了。通常都是从最简单的比例控制开始,甚至PID控制块都不需要。这就是目前市面上大多数的液压伺服控制的做法,人们接受液压的培训很多,但也仅限于此。
模拟量的反馈必须转化缩放为位置单位。然而,我很奇怪的是,在一些PLCwilliam hill官网 里,很多的人在咨询如何把一个模拟量转化为毫米或英寸。如果编程的工程师在问,很显然他啥也编不了。对输入值比例缩放之后,很简单的做法就是,从指令位置减去实际位置,差值乘以比例增益,该值作为模拟量的输出至阀。就是这么简单!
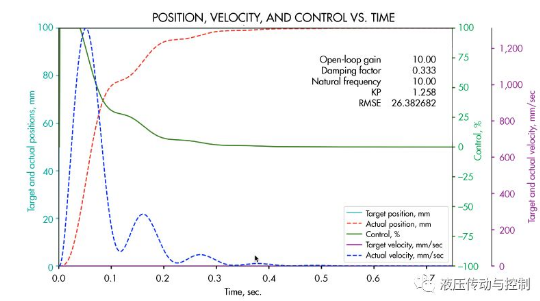
1. 该仿真显示了当指令位置突然改变100mm时将会发生什么。控制输出在100%饱和,执行器突然加速。实际位置则慢慢的接近100mm的目标值。
模拟量控制的PLC设置
PLC控制的一个挑战发生在液压缸的指令和实际位置相差很大的情况,因为此时输出至阀的信号可能很大。结果就是液压缸全速运动至指令位置。在指令位置的时候会发生什么就取决于增益和负载大小了。有时候液压缸会平滑减速至指令位置,但是如果负载很大,也会产生超调,并带有衰减振荡。
关于此问题可以有多种解决方案。一个简单的办法就是限制输出值为低于100%的某个值。更好的解决办法就是准备一个目标发生器,从而可以朝着指令位置的的方向增加目标值。接着,不是比较指令位置与实际位置,而是比较实际位置与下一个目标位置。目标位置在当前位置开始启动,按照期望的速率增加并达到指令位置。对于长行程运动来说,则可以避免初始运动时的振动和冲击。这种解决方案相对来说也比较容易实施。
举个例子,如果两个液压缸跟随同样的目标位置,其位置同步是相对容易的。如果两个缸所受的负载完全一致,目标值的跟踪误差也应该一致,因此它们的实际位置也会非常接近。那么,对于只有比例控制的系统来说,跟踪误差是什么呢?
跟踪误差公式:
Ef = v/(K ? Kp)
此处:
Ef - 跟踪误差,mm,
v - 速度, mm/s,
K - 开环增益, (mm/s)/%
Kp - 比例增益, %/mm.
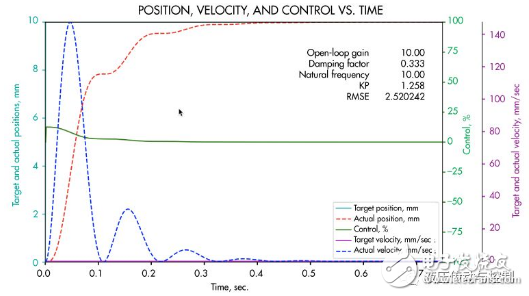
2. 该曲线与图1说设想的方案一样,只是指令位置只改变10mm。注意的是它们用了同样的时间。这是因为运动控制的时间常数是5倍。5倍时间常数即0.358s。意味着1mm的运动要花0.358s才能达到目标值的1%。
单位很重要,并需要保持一致。百分比代表控制输出的百分数。控制输出的百分数可以是 ±10 V, ±20 mA的百分数,或者其它的,只要单位一致就可以。当使用PLC的时候,跟踪误差通常情况并没有那么重要,液压缸只需要能够大体的接近指令位置即可。上面的等式适用于对跟踪误差有限定的应用。用户可以决定动作速度,以满足应用要求。
计算开环增益需要用到VCCM公式,其计算了在100%控制输出时最大的稳态速度。该公式在相关william hill官网 已经讨论过很多次。(延伸阅读:VCCM-如果流量计算不再是Q=A*V?)
比例增益的计算稍微复杂一些。你可以尝试使用试错法,确定一个可以看起来可以工作的数值。如果增益太低,液压缸响应会很迟缓。如果增益太高,执行器会有振荡的可能。然而,最优的增益是可以计算的:
Kp = 2 ? ζ? ωn ? (9 ? 8 ? ζ2)/(27 ? K)
此处:
Kp - 比例增益,输入偏差信号变化的相对值mm与输出信号变化的相对值之比的百分数表示,
ζ - 阻尼系数(未知时假定为0.3333),
ω - 自然频率,弧度/s
K - 开环增益
你也许无法在教科书里找到比例增益公式推导的来源。然而,液压系统设计工程师实际上知道如何控制最优的比例增益,因为他们必须确定阻尼系数,自然频率以及开环增益。通常,自然频率是根据油液的体积弹性模量,液压缸作用面积,油液压缩量,质量等计算而来。因为跟踪误差取决于开环增益和比例增益,液压设计者必须控制跟踪误差。
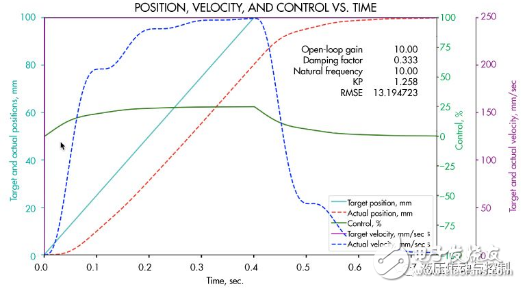
3.该仿真显示了添加一个简单的目标发生器所带来的好处。需要注意的是控制输出并不饱和,实际位置移动更平滑。速度达到期望值的250mm/s(100mm/0.4s)。加速度小很多。速度比例与第1和第3个仿真有很大不同。
对于比例控制的其它思考
假如控制系统已经调定好,并开始一段短行程的运动,并工作起来似乎很正常。试图运动更长一点的距离,两次运动消耗几乎相同的时间。原因就在于随着误差减小,控制输出也减小,因此速度也会大幅减小。对于实际的位置,如果减小的误差低于原始误差1%,其将消耗5倍的时间常数。
时间常数就是控制对象减小63%的错误所用的时间。因此,如果误差迅速上升10mm,而时间常数是1s,误差将在1s之后降至3.68mm。2s之后,误差将降至1.35mm。在5倍的时间常数(5s)之后,误差将减小至0.067mm-低于原始误差10mm的1%。时间常数决定了控制系统将要花多少时间来响应系统的干扰。
现在问题就是,对于一个仅仅采用比例增益的液压缸,如何计算其时间常数?公司并不难:
τ 是最优时间常数。
τ = 3/(2 ? ζ? ωn )
如果阻尼是0.33333,自然频率是10Hz,则时间常数是:
τ = 3/(2 ? 0.333 ? 2 ? π ? 10) = 0.072 s.
因为其消耗5倍的时间常数以达到减小误差至1%,运动过程则将需要0.358s。
需要再次注意的是,最优的时间常数完全由机械(液压)设计者来决定。5倍时间常数的时间过长,液压系统设计者就需要考虑提高自然频率,或者通过增加摩擦提高阻尼。增加摩擦浪费能源。提高自然频率需要增加液压缸缸径,而且也会增大阀通径,蓄能器容积,泵能力以及增加的元件成本。
采用带PLC的简单的比例控制液压系统似乎容易得多,但是PLC编程人员对很多重要的参数并没有去控制。这种约束并不是编程人员的能力问题,而是液压和机械设计方面的原因。不幸的是,PLC编程人员通常是最后一个接触到液压系统的人,他被寄希望于“机械和液压问题,让电气和软件来解决”,然而,这种事实,不会总是发生。系统的特性行为在设计和制造阶段已经定性了。
设备的性能可以通过使用精密的液压伺服控制系统得到提高。初始的成本会很高,但是其性能也提升了。设备也变得易于维护,需要的维护频率也不高了。
下面是仅仅采用比例控制的简单运动的三种仿真。它们基于标准的线性化运动仿真模块,用于伺服液压缸和负载。
H(s) = (K ? ω2n)/[s ? (s2 + 2 ? ζ ? ωn ? s + ω2n)]
K,- 开环增益,假定为10 (mm/s)/%的控制输出,
s, - 拉普拉斯算子,是一个频率,弧度/s,
ζ - 阻尼系数,假定为0.33333,无量纲,
ωn - 自然频率,弧度/s。示例中自然频率为10Hz。
-
自动调平的闭环控制。#闭环控制学习电子知识 2022-10-06
-
基于PID的电机闭环控制浅析2016-01-28 0
-
拓达伺服步进电机位置闭环控制2018-08-25 0
-
总线控制与脉冲控制的区别以及开环、半闭环、闭环控制方式的区别在哪2021-07-05 0
-
什么是控制什么是闭环控制2021-09-13 0
-
闭环控制步进电机对比传统开环控制的优点2022-11-12 0
-
PLC的PID控制怎么实现闭环控制呢?2023-03-30 0
-
温度闭环控制实验2009-05-15 6567
-
什么是闭环控制2010-03-12 2164
-
基于DSP双闭环控制的单相逆变电源设计与实现2016-03-28 1099
-
浅析自动化中最重要的闭环控制2018-11-12 6506
-
PLC如何完成闭环控制及逻辑控制2024-06-27 1022
-
开环控制和闭环控制的应用场景2024-07-30 2397
-
双闭环控制过程有哪些特点2024-08-23 910
-
闭环控制的主要组成包括什么2024-08-23 837
全部0条评论

快来发表一下你的评论吧 !
