

伺服放大器的三种控制方式和接线要点
伺服与控制
描述
伺服驱动器又称伺服放大器。伺服驱动器大同小异,只需理解1-2种就可以。 本文通过各方资料及个人理解整合:
一、伺服放大器有三种控制方式:
1、速度控制:通过模拟量的输入或脉冲的频率对转动速度的控制 2、位置控制:伺服中常用的控制,通过外部输入的脉冲频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度。一般用于定位装置。如数控机床等。 3、转矩控制:通过外部模拟量或直接地址赋值来设定输出转矩的大小。
二、接线位置说明:
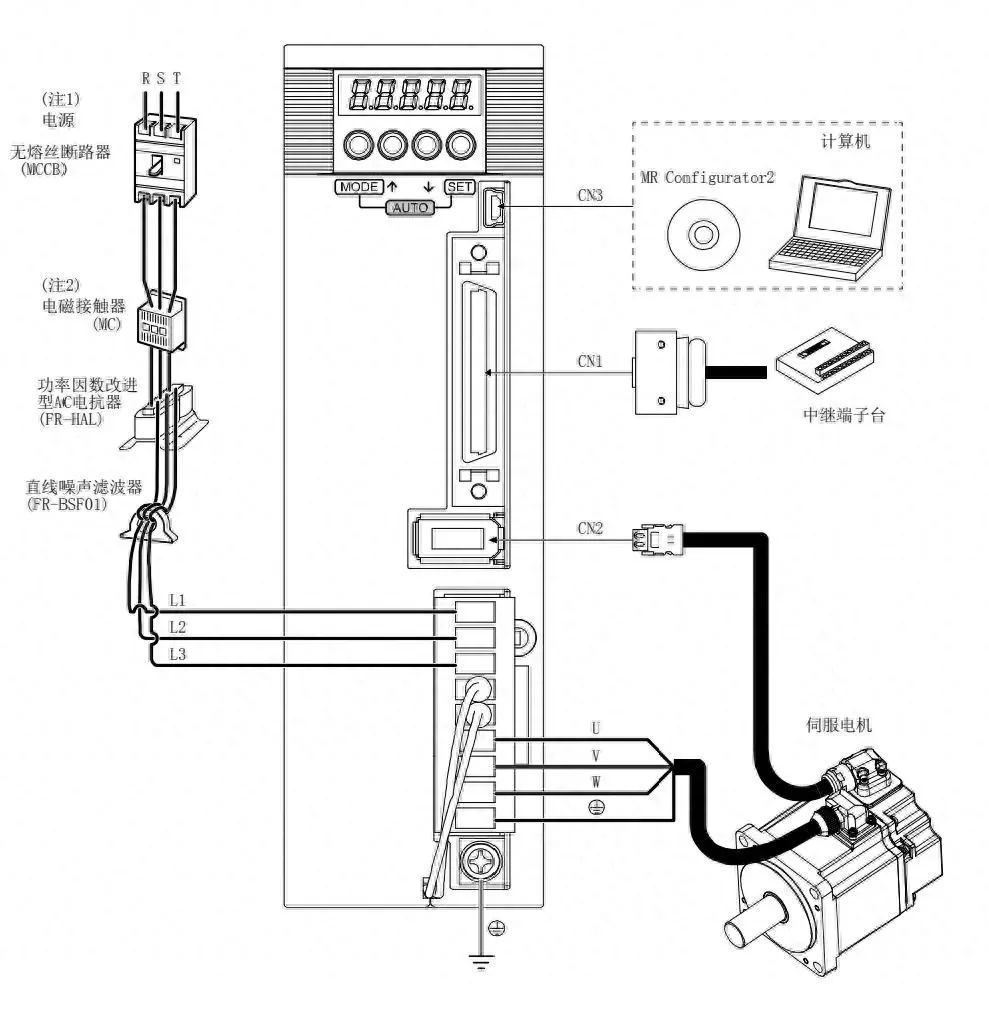
CN3:USB通信用的端口,连接电脑用 CN1:连接输入输出信号,模拟量信号,模拟量监视输出信号及RS-422/485通信的 (RS-485通信需要与伺服驱动器交换数据才需要接入。而接线方法也很简单。A线B线分别接485+和485—即可) CN2:连接伺服电机编码器 (编码器它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移)
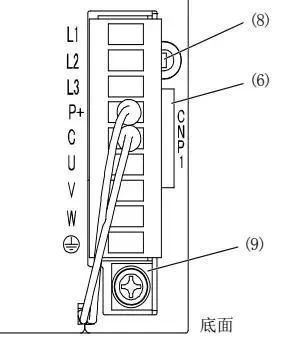
(8)充电指示灯 (6)连接电源,内置再生电阻器。 内置再生电阻器通常情况下出厂就已经接好,它的作用是能在电机急速停下时,进行有效控制。 (9)接地端子 三、功能结构
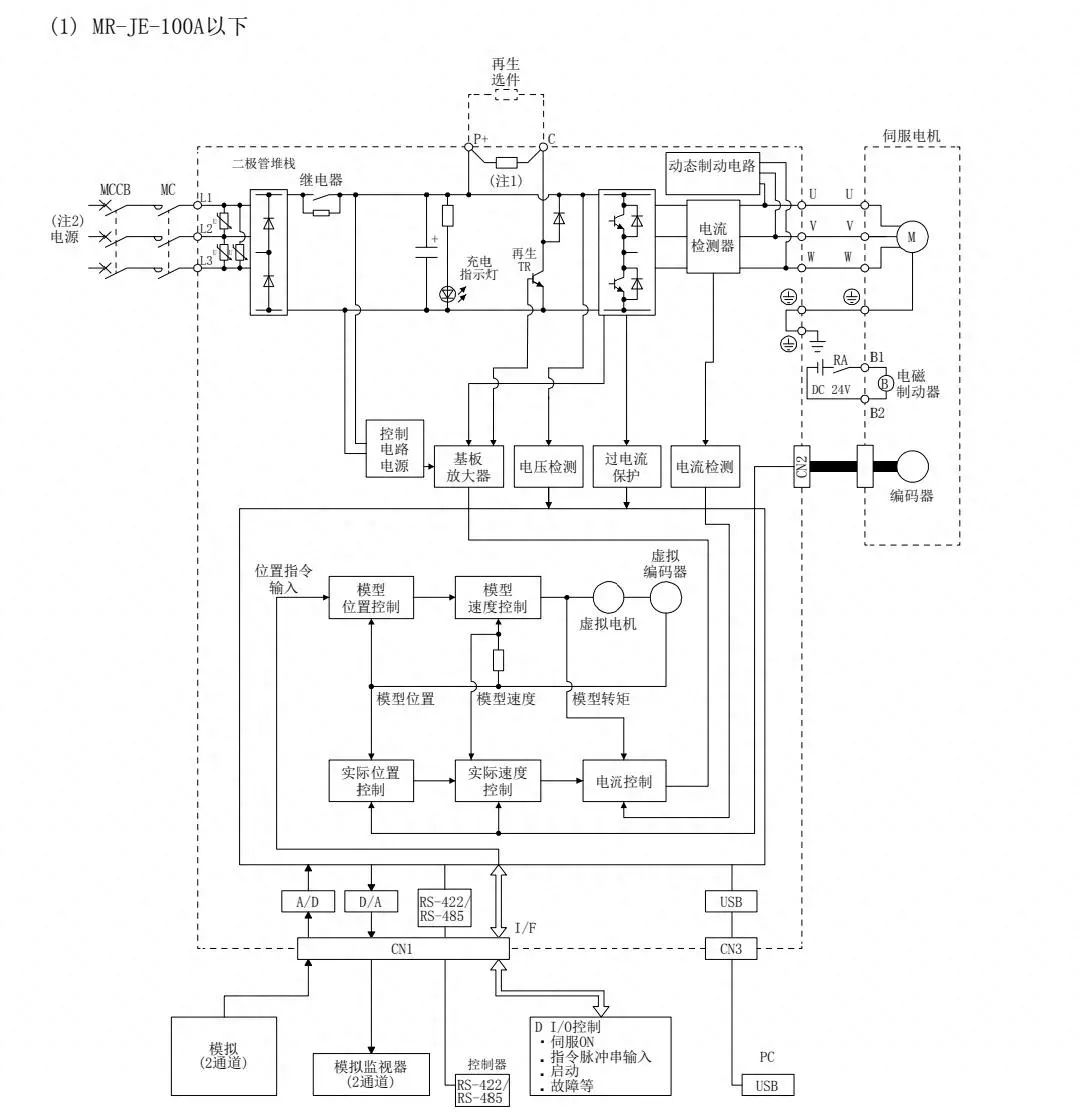
主要说明一下CN1:
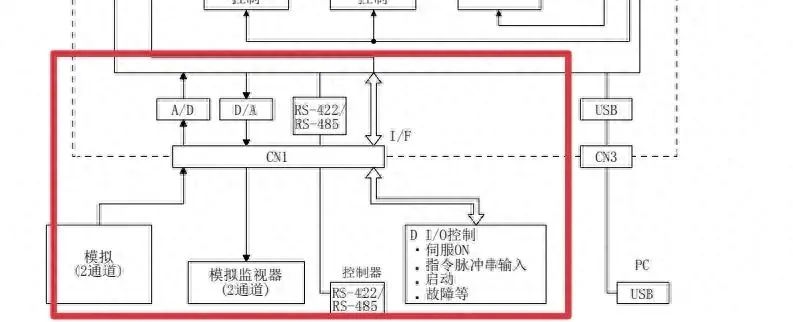
1、AD模拟量采集,将模拟信号转成数字信号,便于数字设备处理 这里的模拟量输入通道是指把被控对象的过程参数如温度、压力、流量、液位等模拟量信号转换成计算机可以接收的数字量信号。
2、DA是将数字信号转成模拟信号与外部的接口。 模拟监控是指是采用传统的模拟信号采集、传输、显示。
3、RS-485通讯可以理解: 在设备联成的设备网中,如果设备数量超过2台,RS485做相当于通讯介质,实现数据的双向访问。
4、I/0控制,伺服ON,指令脉冲串输入,启动,故障等。
编辑:黄飞
-
回收三菱伺服放大器回收松下伺服控制器2020-03-09 0
-
郑州三菱伺服放大器回收2021-08-15 0
-
一种智能型伺服放大器的设计2009-12-29 864
-
伺服放大器2008-04-13 1107
-
直流伺服放大器威廉希尔官方网站 图2009-04-03 1867
-
噪声敏感中使用PWM伺服放大器2012-03-14 1193
-
伺服放大器的原理图解,伺服放大器原理图、参数要求及其输出电流的计算2017-06-12 24329
-
基于三菱的伺服放大器介绍及型号2017-09-23 1199
-
一文告诉你为什么伺服放大器前要用电抗器2018-05-21 12426
-
力矩放大器的控制方式及安装方法2019-07-31 4815
-
如何应用伺服电机的三种控制方式2021-01-22 1737
-
伺服放大器有什么作用2023-04-24 2884
-
日本电产三协推出可支持AC伺服电机的“S-FLAGⅡ”AC伺服放大器2023-03-29 925
-
伺服放大器和伺服驱动器的区别2024-06-05 2047
-
电动执行器的伺服放大器是什么单元2024-07-10 563
全部0条评论

快来发表一下你的评论吧 !
