

步进电机的功能模块设计,步进电机的控制与测速方法
伺服与控制
描述
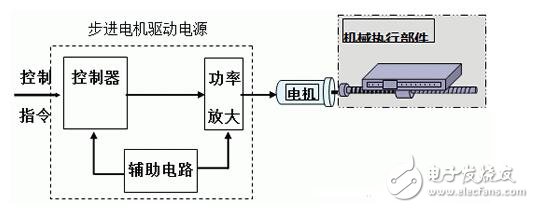
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机的功能模块设计
本模块可分为如下3个部分:
· 单片机系统:控制步进电动机;
· 外围威廉希尔官方网站 :PIC单片机和步进电动机的接口威廉希尔官方网站 ;
· PIC程序:编写单片机控制步进电功机的接口程序,实现三角波信号的输出功能。
(1)步进电动机与单片机的接口
单片机是性能极佳的控制处理器,在控制步进电机工作时,接口部件必须要有下列功能。
①电压隔离功能。
单片机工作在5V,而步进电机是工作在几十V,甚至更高。一旦步进电机的电压串到单片机中,就会损坏单片机;步进电机的信号会干扰单片机,也可能导致系统工作失误,因此接口器件必须有隔离功能。
②信息传递功能。
接口部件应能够把单片机的控制信息传递给步进电机回路,产生工作所需的控制信息,对应于不同的工作方式,接口部件应能产生相应的工作控制波形。
③产生所需的不同频率。
为了使步进电机以不同的速度工作,以适应不同的目的,接口部件应能产生不同的工作频率。
(2)电压隔离接口
电压隔离接口专用于隔离低压部分的单片机和高压部分的步进电机驱动威廉希尔官方网站 ,以保证它们的正常工作。
电压隔离接口可以用脉冲变压器或光电隔离器,基本上是采用光电隔离器。单片机输出信号可以通过TTL门威廉希尔官方网站 或者直接送到晶体管的基极,再由晶体管驱动光电耦合器件的发光二极管。
发光二极管的光照到光电耦合器件内部的光敏管上,转换成电信号,再去驱动步进电机的功率放大威廉希尔官方网站 ,电流放大接口是步进电机功放威廉希尔官方网站 的前置放大威廉希尔官方网站 。它的作用是把光电隔离器的输出信号进行电流放大,以便向功放威廉希尔官方网站 提供足够大的驱动电流。
(3)工作方式接口和频率发生器
用单片机控制步进电动机,需要在输入输出接口上用3条I/0线对步进电动机进行控制,这时,单片机用I/O口的RA0、RAI、RA2控制步进电动机的三相。
步进电机的控制
步进电机的开环控制
1、步进电机的硬件控制
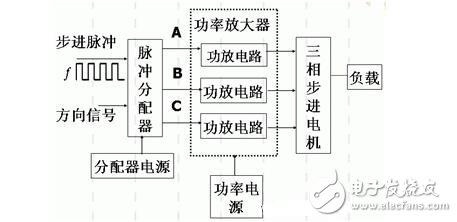
(1)脉冲分配器
当方向电平为低时,脉冲分配器的输出按A-B-C的顺序循环产生脉冲。
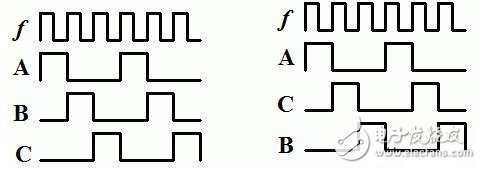
当方向电平为高时,脉冲分配器的输出按A-C-B的顺序循环产生脉冲。
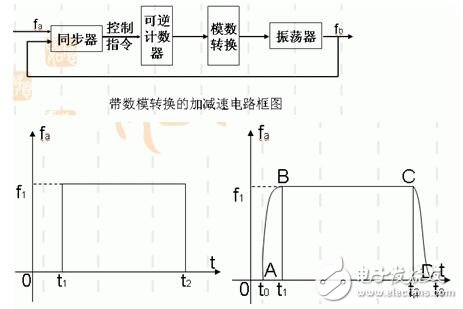
(2)加、减速控制:
(3)功率放大器
将脉冲分配器的输出信号进行电流放大后给电动机的定子绕组供电,使电动机的转子产生输出转矩。
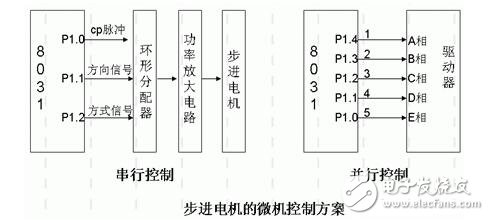
2.步进电机的微机控制:
目前,伺服系统的数字控制大都是采用硬件与软件相结合的控制方式,其中软件控制方式一般是利用微机实现的。这是因为基于微机实现的数字伺服控制器与模拟伺服控制器相比,具有下列优点:
(1)能明显地降低控制器硬件成本。速度更快、功能更新的新一代微处理机不断涌现,硬件费用会变得很便宜。体积小、重量轻、耗能少是它们的共同优点。
(2)可显著改善控制的可靠性。集成威廉希尔官方网站 和大规模集成威廉希尔官方网站 的平均无故障时(MTBF)大大长于分立元件电子威廉希尔官方网站 。
(3)数字威廉希尔官方网站 温度漂移小,也不存在参数的影响,稳定性好。
(4)硬件威廉希尔官方网站 易标准化。在威廉希尔官方网站 集成过程中采用了一些屏蔽措施,可以避免电力电子威廉希尔官方网站 中过大的瞬态电流、电压引起的电磁干扰问题,因此可靠性比较高。
(5)采用微处理机的数字控制,使信息的双向传递能力大大增强,容易和上位系统机联运,可随时改变控制参数。
(6)可以设计适合于众多电力电子系统的统一硬件威廉希尔官方网站 ,其中软件可以模块化设计,拼装构成适用于各种应用对象的控制算法;以满足不同的用途。软件模块可以方便地增加、更改、删减,或者当实际系统变化时彻底更新。
(7)提高了信息存贮、监控、诊断以及分级控制的能力,使伺服系统更趋于智能化。
(8)随着微机芯片运算速度和存贮器容量的不断提高,性能优异但算法复杂的控制策略有了实现的基础。
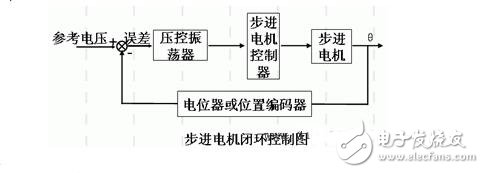
步进电机的闭环控制
步进电机的控制策略
1 PID 控制
PID 控制作为一种简单而实用的控制方法 , 在步进电机驱动中获得了广泛的应用。它根据给定值 r( t) 与实际输出值 c(t) 构成控制偏差 e( t) , 将偏差的比例 、积分和微分通过线性组合构成控制量 ,对被控对象进行控制 。文献将集成位置传感器用于二相混合式步进电机中 ,以位置检测器和矢量控制为基础 ,设计出了一个可自动调节的 PI 速度控制器 ,此控制器在变工况的条件下能提供令人满意的瞬态特性 。文献根据步进电机的数学模型 ,设计了步进电机的 PID 控制系统 ,采用 PID 控制算法得到控制量 ,从而控制电机向指定位置运动 。最后 ,通过仿真验证了该控制具有较好的动态响应特性 。采用 PID 控制器具有结构简单 、鲁棒性强 、可靠性高等优点 ,但是它无法有效应对系统中的不确定信息 。[2]
目前 , PID 控制更多的是与其他控制策略相结合 , 形成带有智能的新型复合控制 。这种智能复合型控制具有自学习 、自适应 、自组织的能力 ,能够自动辨识被控过程参数 , 自动整定控制参数 , 适应被控过程参数的变化 ,同时又具有常规 PID 控制器的特点。[2]
2 自适应控制
自适应控制是在 20 世纪 50 年代发展起来的自动控制领域的一个分支 。它是随着控制对象的复杂化 ,当动态特性不可知或发生不可预测的变化时 ,为得到高性能的控制器而产生的 。其主要优点是容易实现和自适应速度快 ,能有效地克服电机模型参数的缓慢变化所引起的影响 ,是输出信号跟踪参考信号 。文献研究者根据步进电机的线性或近似线性模型推导出了全局稳定的自适应控制算法 , 这些控制算法都严重依赖于电机模型参数 。文献将闭环反馈控制与自适应控制结合来检测转子的位置和速度 , 通过反馈和自适应处理 ,按照优化的升降运行曲线 , 自动地发出驱动的脉冲串 ,提高了电机的拖动力矩特性 ,同时使电机获得更精确的位置控制和较高较平稳的转速 。
目前 ,很多学者将自适应控制与其他控制方法相结合 ,以解决单纯自适应控制的不足。文献设计的鲁棒自适应低速伺服控制器 ,确保了转动脉矩的最大化补偿及伺服系统低速高精度的跟踪控制性能 。文献实现的自适应模糊 PID 控制器可以根据输入误差和误差变化率的变化 , 通过模糊推理在线调整 PID参数 ,实现对步进电机的自适应控制 , 从而有效地提高系统的响应时间 、计算精度和抗干扰性 。
3 矢量控制
矢量控制是现代电机高性能控制的理论基础 ,可以改善电机的转矩控制性能 。它通过磁场定向将定子电流分为励磁分量和转矩分量分别加以控制 ,从而获得良好的解耦特性 ,因此 , 矢量控制既需要控制定子电流的幅值 ,又需要控制电流的相位 。由于步进电机不仅存在主电磁转矩 , 还有由于双凸结构产生的磁阻转矩 , 且内部磁场结构复杂 , 非线性较一般电机严重得多 , 所以它的矢量控制也较为复杂 。文献[ 8] 推导出了二相混合式步进电机 d-q 轴数学模型 ,以转子永磁磁链为定向坐标系 ,令直轴电流 id =0 ,电动机电磁转矩与 i q 成正比 , 用PC 机实现了矢量控制系统 。系统中使用传感器检测电机的绕组电流和转自位置 ,用 PWM 方式控制电机绕组电流 。文献推导出基于磁网络的二相混合式步进电机模型 , 给出了其矢量控制位置伺服系统的结构 ,采用神经网络模型参考自适应控制策略对系统中的不确定因素进行实时补偿 ,通过最大转矩/电流矢量控制实现电机的高效控制 。[2]
4 智能控制的应用
智能控制不依赖或不完全依赖控制对象的数学模型 ,只按实际效果进行控制 , 在控制中有能力考虑系统的不确定性和精确性 , 突破了传统控制必须基于数学模型的框架 。目前 , 智能控制在步进电机系统中应用较为成熟的是模糊逻辑控制 、神经网络和智能控制的集成 。
4 .1 模糊控制
模糊控制就是在被控制对象的模糊模型的基础上 ,运用模糊控制器的近似推理等手段 ,实现系统控制的方法 。作为一种直接模拟人类思维结果的控制方式 , 模糊控制已广泛应用于工业控制领域 。与常规控制相比 ,模糊控制无须精确的数学模型 , 具有较强的鲁棒性 、自适应性 , 因此适用于非线性 、时变 、时滞系统的控制 。文献[ 16] 给出了模糊控制在二相混合式步进电机速度控制中应用实例 。系统为超前角控制 ,设计无需数学模型 ,速度响应时间短 。
4 .2 神经网络控制
神经网络是利用大量的神经元按一定的拓扑结构和学习调整的方法 。它可以充分逼近任意复杂的非线性系统 ,能够学习和自适应未知或不确定的系统 ,具有很强的鲁棒性和容错性 ,因而在步进电机系统中得到了广泛的应用 。文献将神经网络用于实现步进电机最佳细分电流 , 在学习中使用 Bay es 正则化算法 ,使用权值调整技术避免多层前向神经网络陷入局部极小点 ,有效解决了等步距角细分问题 。
步进电机的测速方法
步进电机是将脉冲信号转换为角位移或线位移。
一是过载性好。其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,步进电机使用时对速度和位置都有严格要求。
二是控制方便。步进电机是以“步”为单位旋转的,数字特征比较明显。
三是整机结构简单。传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电机后,使得整机的结构变得简单和紧凑。测速电机是将转速转换成电压,并传递到输入端作为反馈信号。测速电机为一种辅助型电机,在普通直流电机的尾端安装测速电机,通过测速电机所产生的电压反馈给直流电源,来达到控制直流电机转速的目的。
-
基于51单片机的步进电机控制软件可以分为哪几个功能模块?2021-07-07 0
-
8255A控制步进电机2009-06-28 5831
-
步进电机控制系统2015-11-02 1097
-
先进的步进电机控制方法2017-01-23 805
-
基于LPC2148的步进电机调速测速系统的设计与实现2017-12-06 1119
-
步进电机工作效率如何_步进电机的选择方法2018-04-25 4747
-
基于DSP的步进电机速度控制系统2021-06-07 2037
-
基于51单片机步进电机控制2021-11-05 508
-
步进电机的结构2023-02-24 2748
-
步进电机最简单的驱动方法_步进电机控制方法2023-03-08 15146
-
步进电机控制方法及需要哪些控制信号2023-12-20 3763
-
步进电机控制方法 步进电机控制器参数设置2024-01-19 2928
-
步进电机控制方法 步进电机和伺服电机的区别2024-01-22 1168
-
什么是步进电机的细分控制?步进电机为什么要细分,如何细分?2024-02-18 7627
-
步进电机如何自适应控制?步进电机如何细分驱动控制?2024-10-23 511
全部0条评论

快来发表一下你的评论吧 !
