

伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成
伺服与控制
描述
伺服系统是什么
伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和其他形式的反馈控制系统没有原则上的区别。伺服系统最初用于国防军工,如火炮的控制,船舰、飞机的自动驾驶,导弹发射等,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等。
伺服系统主要作用
1、以小功率指令信号去控制大功率负载;
2、在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动;
3、使输出机械位移精确地跟踪电信号,如记录和指示仪表等。
伺服系统的分类
从系统组成元件的性质来看,有电气伺服系统、液压伺服系统和电气-液压伺服系统及电气-电气伺服系统等;
从系统输出量的物理性质来看,有速度或加速度伺服系统和位置伺服系统等;
从系统中所包含的元件特性和信号作用特点来看,有模拟式伺服系统和数字式伺服系统;
从系统的结构特点来看,有单回伺服系统、多回伺服系统和开环伺服系统、闭环伺服系统。
伺服系统按其驱动元件划分,有步进式伺服系统、直流电动机(简称直流电机)伺服系统、交流电动机(简称交流电机)伺服系统。
伺服系统的基本要求
(1)稳定性好:稳定是指系统在给定输入或外界干扰作用下,能在短暂的调节过程后到达新的或者回复到原有平衡状态。
(2)精度高:伺服系统的精度是指输出量能跟随输入量的精确程度。作为精密加工的数控机床,要求的定位精度或轮廓加工精度通常都比较高,允许的偏差一般都在0.01~0.00lmm之间。
(3)快速响应性好:快速响应性是伺服系统动态品质的标志之一,即要求跟踪指令信号的响应要快,一方面要求过渡过程时间短,一般在200ms以内,甚至小于几十毫秒;另一方面,为满足超调要求,要求过渡过程的前沿陡,即上升率要大。
伺服系统主要特点
1、精确的检测装置:以组成速度和位置闭环控制;
2、有多种反馈比较原理与方法:根据检测装置实现信息反馈的原理不同,伺服系统反馈比较的方法也不相同。常用的有脉冲比较、相位比较和幅值比较3种;
3、高性能的伺服电动机(简称伺服电机):用于高效和复杂型面加工的数控机床,伺服系统将经常处于频繁的启动和制动过程中。要求电机的输出力矩与转动惯量的比值大,以产生足够大的加速或制动力矩。要求伺服电机在低速时有足够大的输出力矩且运转平稳,以便在与机械运动部分连接中尽量减少中间环节;
4、宽调速范围的速度调节系统,即速度伺服系统:从系统的控制结构看,数控机床的位置闭环系统可看作是位置调节为外环、速度调节为内环的双闭环自动控制系统,其内部的实际工作过程是把位置控制输入转换成相应的速度给定信号后,再通过调速系统驱动伺服电机,实现实际位移。数控机床的主运动要求调速性能也比较高,因此要求伺服系统为高性能的宽调速系统。
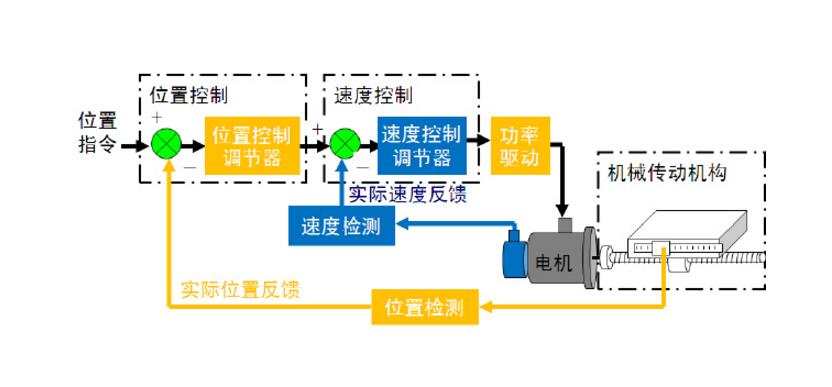
伺服系统的基本组成
伺服系统主要由三部分组成:控制器,功率驱动装置,反馈装置和电动机。控制器按照数控系统的给定值和通过反馈装置检测的实际运行值的差,调节控制量;功率驱动装置作为系统的主回路,一方面按控制量的大小将电网中的电能作用到电动机之上,调节电动机转矩的大小,另一方面按电动机的要求把恒压恒频的电网供电转换为电动机所需的交流电或直流电;电动机则按供电大小拖动机械运转。
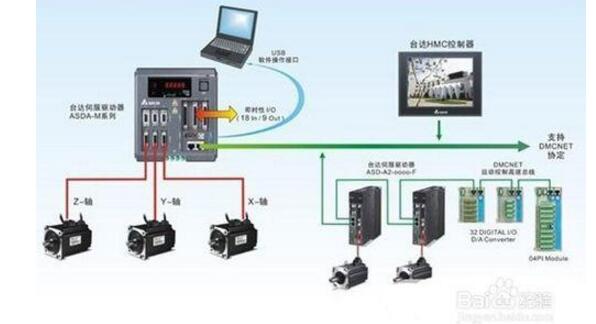
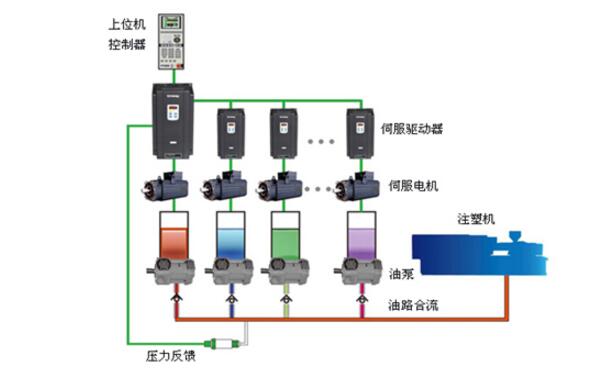
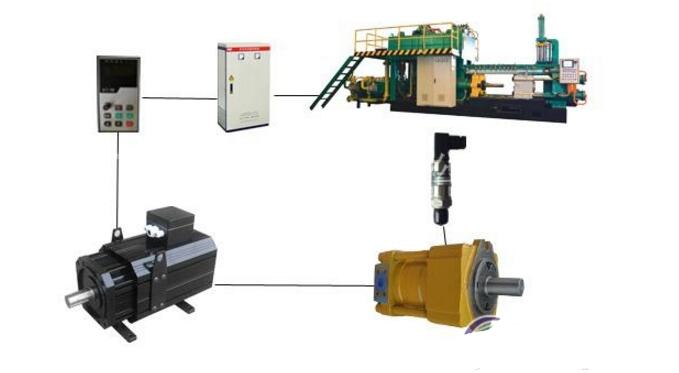
伺服系统在自动化生产中的应用
在数控机床上,伺服调控系统是其不可缺少的一部分。其任务是把数控信息转化为机床进给运动,从而实现精准控制。伺服系统在一些自动化机械设备中的应用非常广泛,特别是在自动化生产发展的大趋势情况下,伺服系统的应用显得越发重要。当前,我国正在推动工业制造业的自动化进程,这个过程中需要大量的工业机器人及机床设备,在这些设备中伺服系统在整体控制方面有非常重要的应用。
其中,数控机床伺服系统的作用在于接受来自数控装置的指令信号,驱动机床移动部件跟随指令脉冲运动,并保证动作的快速和准确,这就要求高质量的速度和位置伺服。以上指的主要是进给伺服控制,另外还有对主运动的伺服控制,不过控制要求不如前者高。数控机床的精度和速度等技术指标往往主要取决于伺服系统。
由于数控机床对产品加工时要求高,所以采用的伺服控制系统十分关键。目前在数控机床上使用的伺服控制系统,其优点主要有:精度高,伺服系统的精度是指输出量能复现输入量的精确程度。包括定位精度和轮廓加工精度;稳定性好,稳定是指系统在给定输入或外界干扰作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。
- 相关推荐
- 伺服系统
-
数控机床的伺服系统2008-12-30 1297
-
进给伺服系统2009-02-16 647
-
伺服系统介绍2011-07-10 2531
-
伺服系统的组成2016-04-26 869
-
伺服系统浅析,伺服系统的分类、结构组成与技术要求2017-06-12 8618
-
伺服系统什么意思_伺服系统的作用是什么2018-04-28 34045
-
伺服系统应用于哪儿_伺服系统应用实例2018-05-31 16365
-
伺服系统包含哪些(基本组成_工作原理_应用)2018-06-01 35429
-
液压伺服系统的组成_液压伺服系统的优缺点2018-06-04 11969
-
交流伺服系统的分类及应用场合2023-03-07 1526
-
伺服系统原理及分类2023-08-27 3074
-
什么是伺服系统?伺服系统的分类、组成及特点2023-09-27 3381
-
伺服系统的基本要求和组成部分2024-06-05 678
-
伺服系统的结构组成及应用场景2024-06-07 1181
全部0条评论

快来发表一下你的评论吧 !
