

华为智能驾驶软件算法及硬件方案
汽车电子
描述
国内智能驾驶的标杆换了,之前小鹏一骑绝尘,看智能驾驶都得盯着小鹏汽车看,但是最近余承东的“遥遥领先”已经魔性的摇到了智能驾驶,特别是华为的ADS 2.0从成本上已经大幅度下降进入20-30万区间的汽车,所以本文将从以下:
遥遥领先的华为智能驾驶
华为智能驾驶硬件
华为智能驾驶软件算法
三个部分,也分别对应为智能驾驶功能,硬件,算法三个方面去分享交流下华为的智能驾驶,希望能给大家带来一些信息。另外文末有小调查,你觉得华为智能驾驶在市占率上是不是能像其技术那样遥遥领先? 遥遥领先的华为智能驾驶 我们一般谈智能驾驶,脑海里面常常浮现的就是领航辅助,记忆泊车等高阶的智能驾驶,其实一个完整的智能驾驶功能体系包括三个方面:
安全,也就是我们听到的AEB等传统ADAS安全防撞的功能,国内C-NCAP对这个方面有完整的定义,并发布测试。
行车,包括车道居中,领航辅助等,当前大家宣传的比较多的就是高速和城区领航辅助。
泊车,包括车位的泊入和泊出,远程泊车,记忆泊车,代客泊车等,我们之前文章《关于自动驾驶泊车-市场功能,硬件和技术》有相关介绍。
根据华为发布信息,华为在安全方面能够做到AEB 90km/h的制动刹停,而目前CN-CAP测试标准最高速度是60km/h;华为能够对侧翻车,逆光行人横穿分别在90km/h和85km/h实施制动刹停,这些数据确实让人惊叹,在竞品中是遥遥领先。

在行车方面,华为将在2023年底实现仅仅依靠SD人类导航地图来领航辅助,平均接管率达到200+km,当然这个数字的意义不大,因为大家测试的路程没有统一,也没有统一的交通情况,但作为业内人士来讲估计大家都会赞同华为的技术和功能现在就是遥遥领先。
在泊车方面,从我自己的感觉来讲,遥遥领先,从可以识别车位的能力到泊车的速度来讲都不亚于老司机,我曾经在路边前有都有车的侧向停车位犹豫思考如何泊,但华为亮起的泊车路径以及快速的泊入让我如释重负。 最近问界M7的发布会上,华为表示支持自车+0.4m超窄车位,机械停车位泊车;更支持地面,地下记忆泊车,年底将支持代客泊车。 所以,从功能科技角度来看,华为智能驾驶确实是遥遥领先!那华为实现这些遥遥领先的背后硬件方案如何呢?
华为智能驾驶硬件方案
华为的硬件经历了ADS 1.0硬件和ADS 2.0硬件,华为最开始的智能驾驶项目是和北汽极狐开启的,大概在2022年初实际交付,当时的3个激光雷达,前方4个摄像头(1个长距,1个宽视场角,2个组成双目),6个毫米波雷达,配上2颗华为昇腾610芯片的MDC 610pro 或者叫MDC 810。之后和长安宁德时代合作的阿维塔也是沿袭此套硬件方案。ADS 1.0 当时刚开始出来,有人号称成本都快10万了,除了价格贵了点,其他毛病都没有,所以这些车刚开始价格都是40万左右的售价。
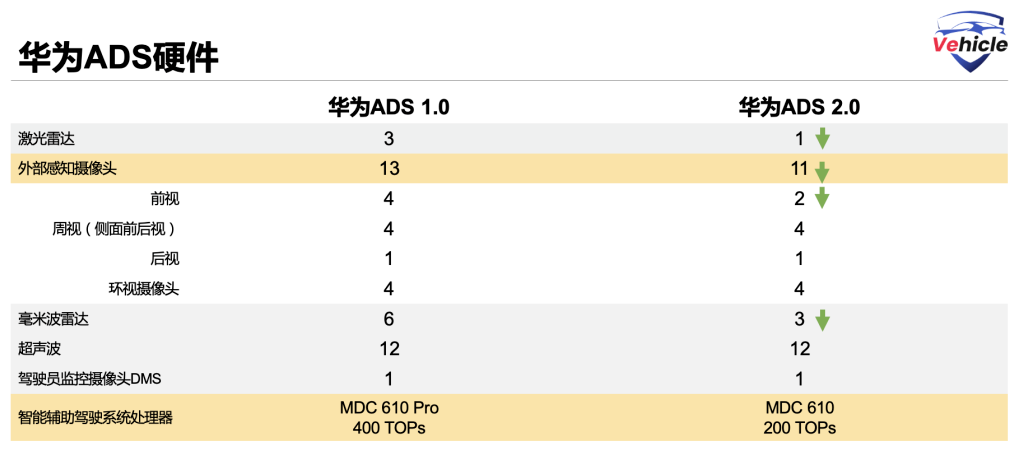
华为ADS 2.0硬件最早开始于问界M5之后到M7,两款车的售价是30万元左右的显然原来的1.0的硬件价格太贵,所以2.0的硬件减掉了侧向两个激光雷达,减掉了前向两个双目摄像头,减掉了3个毫米波雷达,减掉了一块昇腾610芯片,这一套价格应该可以把原来的成本至少减掉一半以上,按照现在来看应该是3万人民币之内。 根据余承东最近问界M7发布会信息以及查询问界M7官方网站发布的信息,ADS 2.0硬件下的性能与ADS 1.0可谓并无任何差异。如果从激光雷达的角度来讲的话,3颗激光雷达的布置从视场角来看的话肯定好于1颗前向。
值得一提的是,华为方案的激光雷达在其记忆泊车方面算是一枝独秀了,小鹏记忆泊车是记住轨迹,而华为却是利用激光雷达铸就了行走的画图机器,通过激光雷达画出泊车地图,然后根据地图可以支持任意停车位的泊车。还有抓狂的是华为在其ADS 1.0方案时候就将前向激光雷达和侧向两个颗激光雷达解耦,也就为ADS 2.0只用一颗埋下了伏笔。 其实对于硬件来讲,目前很多新势力都堆了此类的硬件方案,但显然都很难达到华为智能驾驶的效果,华为智能驾驶背后还有其软件能力支撑。
华为智能驾驶软件算法
华为发布其主要依赖两个算法:
“看得懂物”的GOD(General Obstacle Detection,通用障碍物检测网络)2.0网络,可以识别通用障碍物白名单外的异形物体,障碍物种类精细识别(如区分救护车、警车等),识别率高达99.9%
“看得懂路”的RCR 2.0(Road Cognition & Reasoning,道路拓扑推理网络)实现导航地图和现实世界的匹配。
如何识别异形物体,或者未标注的物体是感知的难题,在智能驾驶刚开始的时候,大家都是冲着自己标注的方式去告诉汽车这个物体是什么;但到了特斯拉在台湾高速上,撞上事故车之后,基本发现这种标注根本行不通,长尾太多了。到了特斯拉2022年的AI day上特斯拉推Occupancy networks《智能驾驶-城市领航辅助必备的BEV以及Occupancy networks》,对于驾驶来讲不管你是什么,而主要是看你是否影响驾驶也就是道路是否被占有。 华为采用的方式其实和特斯拉是类似的Occupancy networks,不过可能的差异是华为应该很好利用了其激光雷达,这样应该是可以降低对视觉的算法算力要求或者缺陷。感知传感器摄像头和激光雷达汇入一个时空网络,这个时空网络是一种在其结构和分析中包含空间和时间信息的网络,它用于建模和分析随时间和空间演变的复杂系统,之后进行感知处理。总结起来华为GOD算法三个亮点是:
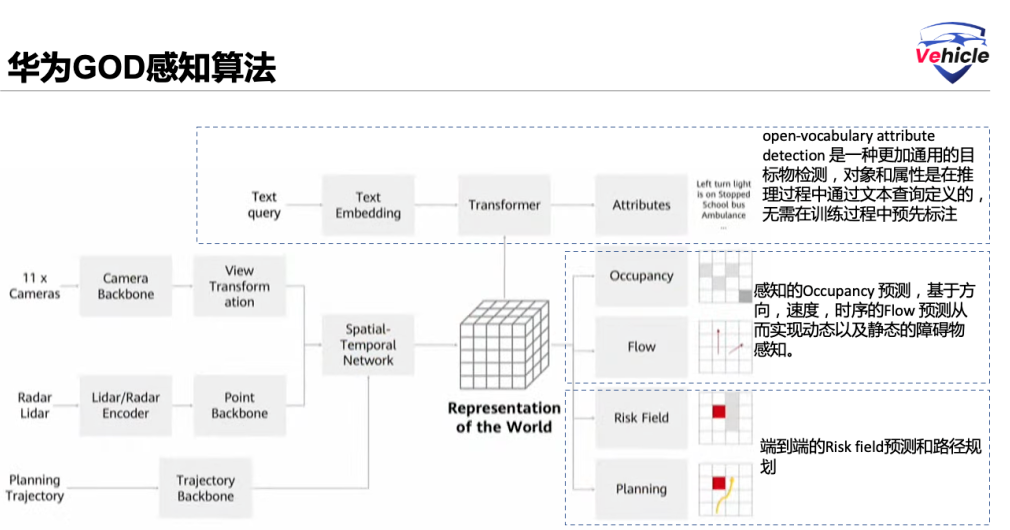
感知的Occupancy 预测,基于方向,速度,时序的Flow 预测从而实现动态以及静态的障碍物感知。
端到端的Risk field预测和路径规划。
通用物体检测OVOD,Open-vocabulary Object detection 是一种更加通用的目标物检测,传统的目标物检测是需要匹配标注的物体,但OVOD检测和识别图像中开放的对象集及其相关属性的任务。对象和属性是在推理过程中通过文本查询定义的,无需在训练过程中预先了解测试类。
整个算法从感知到结果的运算在10ms之内计算完成。其实自动驾驶中,算法结构相对容易,谷歌等学术,GitHub等一众热衷分享的资源,总会让你站在巨人肩膀上,但是数据和算力确不是所有人能够搞定的事情,华为表示其有一支道路实况采集团队,发现有价值的场景就自动发送云端自动标记,通过NeRF(Neural Radiance Field)算法构建3d空间,整个流程一天可以构1百万框真值。根据华为感知算法负责人苏朋表示,华为已经根据真值构建了超一亿英里,然后通过成千上万张NPU算力芯片来训练算法,之后将训练的算法OTA部署到整车上,从而确保越来越聪明。 一般实现领航辅助有一个重要的前提是,告诉汽车你要去哪里,但这个不是我们人类看的地图,他是给智能驾驶的地图也就是领航地图。
国内刚开始采用的是高精地图路线,高精地图的基础层是可以显示厘米级精度的路边信息。例如,那里的数据包含所有道路标记和地理边界。但是呢我们之前文章《去高精”不是“去地图”,而是“去图商”》讲述了当前高精地图的困局,所以目前产业不少走向去高精地图化。当然不少喊着去高精地图但是还是需要特殊的智能驾驶地图,例如高德推的HQ地图,腾讯推的HD Air,四维图新推的功能地图等。但是华为此次的RCR确实完全不需要智能驾驶地图的存在,只需要利用人类驾驶SD地图信息。
那华为算法如何实现的? RCR 2.0(Road Cognition & Reasoning,道路拓扑推理网络),这是华为给出的方案,他可以实现导航地图和现实世界的匹配。 如何理解导航地图和现实世界的匹配,首先回到按照高精地图驾驶的方案,高精地图提供汽车高精度驾驶的参考线,智能汽车配合高精定位按照参考线行驶,不管转弯还是路口按照线跑就行了,你可以理解为类似火车的电子轨道。 所以没有高精地图时候,车辆智能驾驶就会需要自己解决两个难点:
如何确定车辆行驶在车道内?一般就是视觉车道线识别技术,之前文章Momenta的“无图”智能驾驶算法方案》介绍了momenta的DDLD就是此类技术。
路口如何确定车道的关系,确保自己转弯或者直行走在正确的车道?我们之前文章《Tesla AI Day -特斯拉自动驾驶FSD的进展和算法软件技术之算法》介绍过特斯拉的车道识别算法。
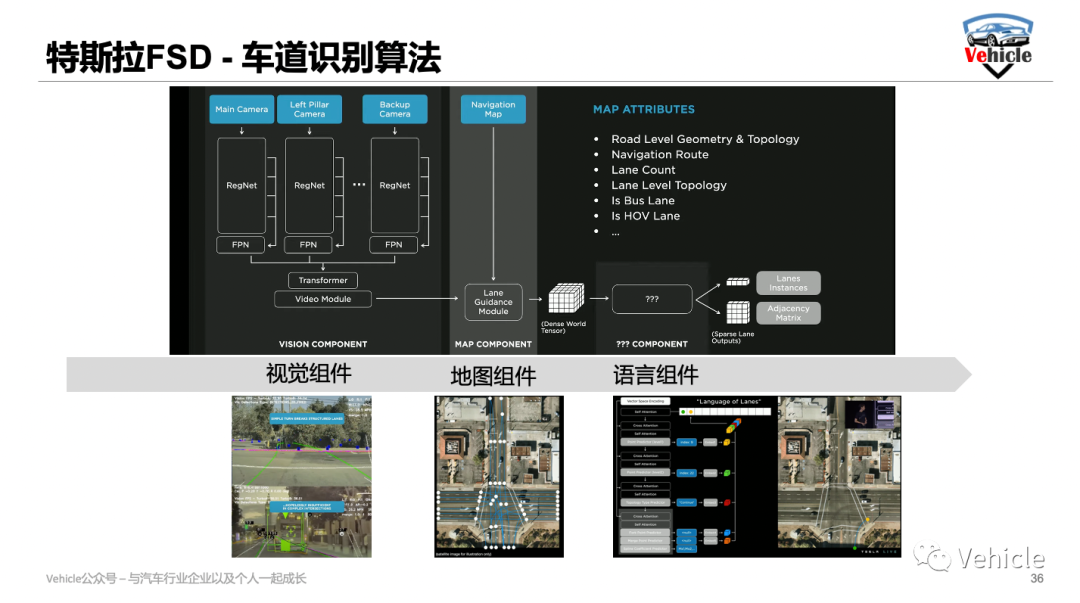
里面特斯拉技术亮点之一就是能够推理路口车道之间的关系。 所以,华为应该就是采用特斯拉类似的视觉算法技术,确定车辆行驶在车道内,根据人类使用的SD导航地图提供的路线信息以及路口视觉感知信息,RCR来推理路口车道之间的关系,从而实现领航辅助。 于是这些算法的组成就有了华为说的既能“看得懂物”的GOD又能“看得懂路”的RCR算法。总的来说和特斯拉的路线类似,但华为又将激光雷达玩的溜溜的。
总结
华为确实是一个很厉害的公司,我们目前看到很多公司都是产业的快速应用,但华为有2012实验室等致力于很多基础性的研究,从而为产业提供基础技术,当然也可能是人才方向,这些都为产业的快速应用提供非常好的基础。 另外华为还有不少人专门研究市场,技术,产品之间的关系以及演化路径,确保自己的技术和产品站在一个正确的方向中。 最后华为在产品研发实施中非常注重主线,记得刚开始的华为智能驾驶真的不好用,功能也不多,但是随着几次迭代日臻完善,后来和华为朋友聊天,他们表示开发中他们会抓住关键路径,先搞定基础,关键,再进行优化迭代。 所以华为积累技术基础,把握方向,抓重点和优先进行实施,做任何事情基本都容易成功。那么比你更富有,比你更聪明,还比你更勤奋,那其他人还怎么活?
编辑:黄飞
-
华为智能电网解决方案2011-01-12 0
-
非道路车辆智能辅助驾驶解决方案2017-03-24 0
-
智能家电\智能硬件解决方案2017-03-28 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
华为发布全新鸿蒙OS系统!已获众多巨头支持 ?2020-09-04 0
-
智能驾驶和物联网产品及解决方案2020-10-23 0
-
如何进行智能驾驶算法开发?2020-12-15 0
-
智能驾驶数采及测评解决方案分享2021-01-06 0
-
华为将推出子品牌汽车2021-04-13 0
-
对极狐阿尔法S华为HI版的几点看法 精选资料分享2021-07-27 0
-
介绍无人驾驶硬件平台设计2021-09-09 0
-
无人驾驶硬件系统主要包括哪些2021-09-09 0
-
基于SPC560P的硬件及MCTK软件电动汽车压缩机解决方案2021-11-04 0
-
润和软件携OpenHarmony亮相全国首场华为云云商店·星品推介会2022-09-02 0
全部0条评论

快来发表一下你的评论吧 !
