

电动汽车紧凑型轮毂电机的内部结构解析
汽车电子
描述
概述:Protean Electric开发了一种轮内驱动系统,该系统将电机、动力电子设备、数字控制和摩擦制动器集成在一个紧凑的外壳中。Protean Drive为制造商提供了更高程度的设计自由度,甚至可以用于将现有车辆转换为混合动力或全电动汽车。
Protean Drive是一种用于乘用车和轻型商用车的轮毂电机系统。电机占据了轮辋内部的空间,与传统上占据该空间的机械制动器合并在一起。
车辆可以配置为两轮或四轮驱动,无论是纯电动还是混合动力,并配备400或800 V电池系统。一对轮内电机代表了传统电动车轴的替代方案,在电动车轴中,电机和逆变器安装在车身上,驱动通过齿轮、差速器和半轴传递给车轮。展示了一个使用四个轮毂电机的系统。
轮内电机是直接驱动,意味着没有变速箱或变速器。电机是一个带外转子的永磁同步电动机(PMSM)。逆变器与电机集成在同一个封装中。与传统的电动车轴相比,车轮内部所有组件的集成大大节省了空间。
轮内电机的优势
使用轮内电机节省的空间为重新封装电气元件创造了机会。例如,电动汽车的一个常见缺点是电池的位置。在大多数电动汽车中,电池以所谓的滑板设计放置在地板上。这种包装的效果是将地板抬高约150毫米。这迫使车辆设计师要么减少乘员的座舱空间,要么提高车顶的高度,导致空气阻力的增加,相应的续航里程减少。
采用轮内电机的替代电池包概念如图所示。在这个示例中,电池封装为乘客的脚舱留出空间。这种电池单元的排列提供了与滑板电池相同的充电容量,但使车辆设计师能够在不提高车顶高度的情况下增加乘员的座舱空间。
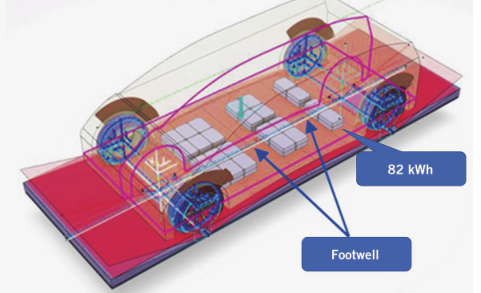
图 采用轮内电机的电池包概念(Protean)
与电动车轴相比,使用轮内电机的车辆的动力传动系统部件的质量也有所减少,这对电池也有好处。通过减少质量,既可以减少电池容量,也可以增加现有电池的续航里程。
轮毂电机的另一个优点是这种系统的扭矩矢量控制能力。扭矩矢量控制是跨轴差分扭矩的应用,是轮内电机系统的零成本特性,通过要求左右电机输出不同的扭矩来实现。这允许转向不足和过度转向特性动态优化。扭矩矢量控制还可以减少后轮驱动应用中的转弯半径,使后轮与转弯的前轮一起工作。通过对汽车后桥施加扭矩矢量,在不改变车辆的情况下,转弯半径可以减少7%到10%,如图所示。
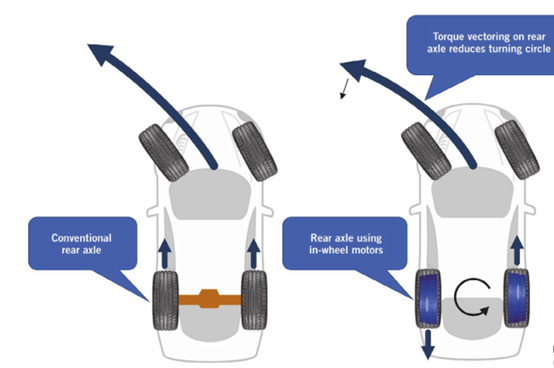
图 使用轮内电机减少转弯半径(Protean)
在传统车辆上,悬架系统妥协,以实现所需的欠转向和过度转向特性和转向自扶正行为。由于这些功能可以通过扭矩矢量控制来实现,因此悬架系统可以在不影响车辆操控的情况下优化以提升乘坐质量。
轮毂电机面临的挑战
尽管轮毂电机带来了诸多好处,但其设计也带来了一些挑战。工程师们面临的主要困难之一是将电机和逆变器封装到轮辋内的可用空间中。目标是尽量减少对轮端其他系统的干扰,如车轮轴承、悬架、转向和摩擦制动。大直径环形体积适合于高半径,轴向短,高扭矩电机,但不适合封装逆变器。Protean Drive的设计可以使用标准轮辋、轴承、悬架和转向系统,但与传统解决方案相比,制动盘必须倒置。图显示了悬架和制动器的典型集成。
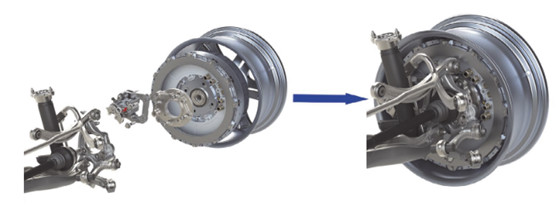
图 集成了悬架和制动的Protean Drive(Protean)
轮内电机工作的环境需要设计成能承受振动和冲击。根据GMW3172标准,在三个轴上以平均11 g rms的加速度进行32小时以上的振动测试。此外,其设计必须在每个轴的两个方向上能承受20个100g的冲击加速度。
与传统电动汽车的电机和逆变器相比,密封也是一个更大的挑战。该系统在其使用寿命期间可能需要置于水中,并受到灰尘、砂砾和其他物质的影响。在转弯和重载制动时,车轮轴承的偏转使动态密封的功能进一步复杂化,这反过来意味着密封必须容忍转子和定子之间的相对运动。
热量必须在系统中得到控制。电机用50:50的水-乙二醇混合物冷却,通常可以在13升/分钟的公称流量下去除约5千瓦的热量。电机绕组、逆变器和摩擦制动器都是热源。通常情况下,绕组可承受最高180°C的温度,电子元件可承受最高125°C,电容器元件可承受最高100°C。在运行过程中,制动盘可能达到最高500°C的高温;制动盘连接到转子,意味着传导到驱动磁体的热也必须考虑在内。
噪声、振动和粗糙度(NVH)是轮毂电机的一个重要考虑因素。如果设计时不仔细约束磁场对磁体的励磁,大直径外转子会是一个潜在的噪声源。这是进一步复杂化的非直线特性的电动机,这很大程度上是紧凑设计的结果。通过在适当的幅度和相位插入基频的谐波来调整相电流波形的能力可以减少扭矩脉动,从而使车厢内的结构噪声水平对于高质量的乘用车来说是可以接受的。
如果不提非簧载质量,关于轮毂电机的挑战的讨论就不完整。无可争辩的是,轮毂电机增加了车辆非弹簧部件的质量。这种增长的影响还不明晰。传统观点认为,任何非弹簧质量的增加都是有问题的,应该不惜一切代价避免。现实情况要复杂得多。从理论角度来看,关键因素不是绝对非簧载质量,而是簧载质量与非簧载质量之比。与此同时,在大型车辆中,除了经验最丰富的驾驶员外,安装轮毂电机对操控性的影响几乎没有人注意到,而快速扭矩响应和扭矩矢量控制的优势远远弥补了这一点。在实际应用方面,Protean已经委托进行了几项关于非簧载质量影响的研究,其中包括Lotus Engineering的一项评估。本文的结论是,虽然使用复杂的工程技术可以测量性能上的差异,但在典型的车辆开发计划中,没有任何差异超出了与目标的正常偏差。
电机结构
该设计是由封装电机和逆变器的可用空间决定的。可用的体积是环形的。轮辋限制外径,轮轴承限制内径,总轴向长度受轮辋宽度和要求纳入摩擦制动器的限制。例如,Protean Drive电机-逆变器设计用于18英寸轮辋的客车,并提供1400牛米的扭矩输出,其外径约为400毫米,内径为200毫米,总轴向长度约为140毫米。
与逆变器相关的电源和控制电子设备分布在封装的车辆(或车载)一侧。电容器是定制设计部件,占据了电机内部的一个环。定子的主体是一个机械加工的铝铸件,作为一个散热装置;冷却通道在电机的两个面运行,也冷却电力电子设备。
电力电子设计在定制模块中使用650 V额定绝缘栅双极晶体管(IGBT)。每个电源模块由一个三相逆变器组成,每个单元包含四个这样的模块。线圈和逆变器的布置如图所示。
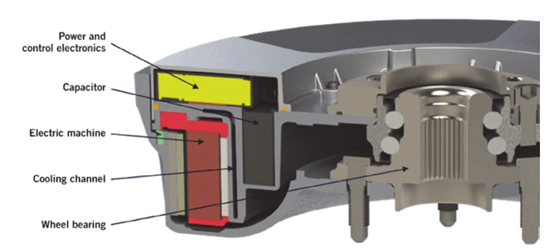
图 定子内电子元件、电容器和电机的布置(Protean)
定子包括由铸件制造的铝体,其上有热滴工艺安装的背铁。背铁由一堆电工钢叠片组成,尺寸的选择使得在所有工作温度下,两个部分之间都有一个干涉配合,能够应对最大扭矩。
定子的电磁设计由压入定子背铁的插入齿组成。总共有72颗齿,每颗都缠绕着32圈铜线。在制造过程中,自动绕线机将导线绕在三个连续的齿上形成一匝。这些匝通过引线框连接在一起,将电机配置成八个三匝子电机,其中两个子电机并联绕线,如图所示。
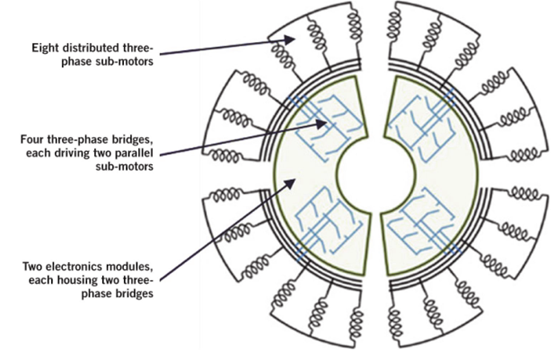
图 驱动架构示意图(Protean)
定子本体是水冷的。冷却剂通道配置为两层;第一层为电力电子设备提供冷却,第二层为线圈和定子背铁提供冷却。该系统使用50:50的水-乙二醇混合物,标称流量为13升/分钟。冷却通道设计如图8所示。
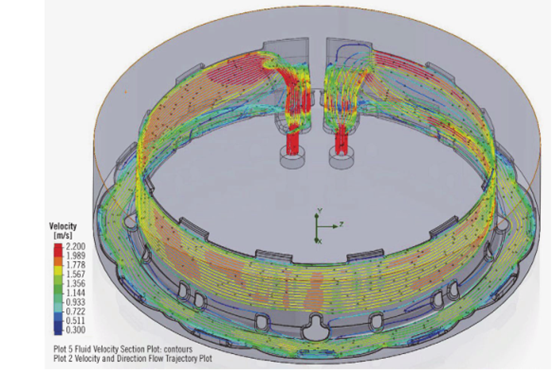
图 定子冷却通道(Protean)
一对电力电子模块安装在定子的后面,每个模块有两个三匝电桥。定子的后部有电子罩保护不受环境影响。
转子由铝铸件制成。在制造过程中,转子外壳加热,并插入背铁。这两个部件的尺寸都经过精心选择,以确保它们在所有车辆运行温度下都能相互配合。
三十二对驱动磁体堆粘接在背铁的内表面。这些磁铁与定子线圈产生的磁场相互作用,产生扭矩。背铁提供了一个封闭的磁通路径,以确保转子外没有杂散磁场。
制动盘用螺栓固定在转子外部,提供机械制动,因此该结构必须设计成能够承受在制动和横向加速事件中施加在转子上的最坏情况的力。在这些情况下施加的力取决于车辆的质量。
转子内部装有一个磁环。有相同数量的极对作为转子驱动磁体。位置传感器(正弦/余弦编码器)测量这个环产生的磁场,以确定转子的角度位置。
转子还包含橡胶密封,以防止污染物进入转子腔。该密封可以随着速度的增加而提升,以减少密封和运行表面的磨损。
一个标准的汽车轴承连接转子和定子。轴承承载车辆的全部载荷,因此转子和定子都不承载支撑车辆的力。与电机设计的所有元素一样,轴承的特性也是一种权衡。它必须足够坚硬,以确保在高横向加速事件中定子不会触碰到转子。反过来,轴承的阻力必须尽可能低,以减少损失并最大限度地提高系统的效率。
电机包含两个电子模块,每个电子模块包含两个逆变器。每个模块都包含一个处理器,该处理器读取相关传感器并生成信号以开关门驱动器。这些依次为IGBT提供开关信号。这些模块安装在定子的背面,并连接到引线框中的引脚,引脚又连接到线圈。
控制逆变器所需的传感器包括:
——每个逆变器三个电流传感器,每匝一个(每个电机总共十二个)
——每个模块一个位置传感器(每个电机总共两个)
——每个逆变器三个线圈热敏电阻,每匝一个(每个电机总共十二个)
——每匝两个IGBT热敏电阻(每台电机共24个)
——每个逆变器一个母线电压传感器(每个电机总共四个)。
电机控制
电机中的逆变器采用场定向控制(FOC)。该方法利用矢量技术控制定子电流。该算法将三相系统(通常称为U, V和W)的三相电流随时间呈正弦变化,转换为两坐标系统(称为D和Q),其中电流在特定扭矩点处是时稳定的。这有效地将控制三个交流电的问题转化为一个控制两个(大部分)独立直流电的问题。
简单来说,Q轴上的电流与扭矩成正比。D轴电流为磁通分量;当旋转转子中的磁体产生的反电磁力(EMF)开始超过直流母线电压时,这个术语变得重要。D轴电流通过一种称为磁通减弱的技术抵消反电动势。
FOC在很大程度上依赖于两个变换,即Park-Clarke变换,将三相电流(U, V,W)转换为二维(D和Q),以及逆变换,将D, Q向量转换回三相。
一旦信号被转换到直流域(D和Q),它们就可以使用传统的控制技术进行控制,例如比例积分(P-I)回路。
对FOC控制技术的全面讨论不在本文的范围,但一些半导体制造商提供了有用的介绍,例如德州仪器。
FOC控制的挑战之一是确定在特定直流母线电压和速度下产生特定扭矩所需的D和Q电流量。在其他资料中描述了一种确定D和Q电流需求的理论方法。电机采用查找表的方法,根据直流母线电压、电机转速和扭矩需求推导出所需的D和Q电流需求。
Protean Drive的紧凑设计导致电机包含反电动势中电频率的谐波。这些与基本相电流相互作用,产生扭矩脉动。为了消除这种不良影响,控制器在P-I回路的输出中注入电压以消除干扰。顶层控制回路如图所示。
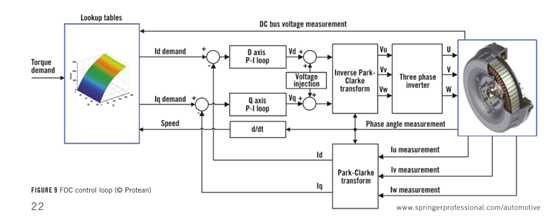
图 FOC控制回路(Protean)
控制回路每62.5 μs (16 kHz)反复一次。控制频率是几个因素之间的平衡。控制回路必须足够频繁地运行以控制系统。在电机的最高转速(1600转/分)和转子中有32对磁体时,最大电频率为853赫兹。在16千赫,因此每周期大约有19个点,这提供了一个很好的控制水平。每次IGBT关闭或打开时,都会产生少量的热量。为了使效率最大化,应尽量减少转换次数,因此较低的开关频率更好。
NVH是轮毂电机的主要考虑因素。开关瞬态和转子上磁铁之间的相互作用可能导致可听见的噪声。因此,开关频率必须大于人耳可感知的最大频率,大多数成年人的感知最大频率约为16千赫。
结论
Protean电气公司花了多年时间来改进他们的组合电机-逆变器的设计,以生产高扭矩密度驱动系统。Protean Drive是一种轮毂电机驱动系统,为纯电动汽车和混合动力汽车提供了高度的设计自由度。在开发过程中做出了一些妥协,克服了一些挑战。
审核编辑:黄飞
-
电动汽车电机2013-03-13 0
-
电动汽车2013-05-14 0
-
详解电动汽车电机电控技术2016-12-02 0
-
新能源纯电动汽车轮毂电机的优点和缺点2018-10-12 0
-
汽车轮毂电机的原理和优点2018-10-12 0
-
电动汽车电机电控技术解析2018-10-15 0
-
电动汽车四种驱动电机解析2018-10-15 0
-
电动汽车驱动电机的选配原则研究2018-10-19 0
-
如何高效评价电动汽车的驱动电机与控制器?2018-10-21 0
-
电动汽车中电机和电控技术分析2018-10-31 0
-
【设计技巧】轮毂电机驱动技术2019-07-27 0
-
纯电动汽车电机啸叫噪声解析2021-01-27 0
-
优化电动汽车的结构性能2021-09-17 0
-
轮毂电机的原理与结构2017-11-03 36140
-
轮毂电机驱动系统在电动汽车上的应用2024-01-12 844
全部0条评论

快来发表一下你的评论吧 !
