

智能驾驶基本概念定义 中国智能驾驶格局分析
汽车电子
描述
量子位智库发布了《智能驾驶2023年度报告》,在这篇报告中提出了一些很有价值的框架。目前中国智能驾驶技术正迅速演进,市场格局也日趋清晰。报告讨论了智能驾驶在行车领域的技术现状,分析不同产品的迭代路线,并深入探讨泊车领域的发展趋势。通过价格、实现能力、感知方案及供应商等方面的划分,揭示了中国智能驾驶产业的梯队、阵营和派系,为行业发展提供参考。
01 基本概念定义
智能驾驶产品分类主要包括行车和泊车两类。
● 在行车领域,产品迭代路线包括低级辅助驾驶到高级驾驶辅助,涵盖了诸如LKA、AEB、ACC、LCC、ALC、HWA等功能。城市NOA和高速NOA则实现了在城市和高速场景下的智能驾驶。
◎基础L2级:辅助驾驶功能,如LKA、AEB等。 ◎高速NOA:在高速高架、环路、城市快速路等场景实现智能驾驶。 ◎城区NOA:在城市开放路况下实现智能驾驶,包括无保护左转、无保护掉头、识别交通信号灯等功能
● 在泊车领域,产品发展路线包括辅助泊车、记忆泊车、AI代客泊车等。
◎自动辅助泊车:需要驾驶员监控,通过传感器实现横向和纵向控制。 ◎记忆泊车:学习、记录用户常用泊车位置,建立环境特征地图,实现自主泊车。 ◎AI代客泊车:在车内无人情况下,系统自动完成低速自动驾驶、避障、搜索泊车位和泊入、泊出。
智能驾驶产品价格门槛不断下探。城区NOA功能的车型最低售价逐渐下降,价格趋于稳定。例如,蔚来智能驾驶产品采用付费订阅制,价格为680元/月。
02 中国智能驾驶格局
● 梯队划分根据实现能力划分,中国智能驾驶格局分为正当代、次世代和领先一代。城区NOA和高速NOA的实现能力成为衡量的主要标准,大部分传统车厂未完全实现基础L2级功能。

芝能点评:这个划分存在争议,大家可以留言你的想法
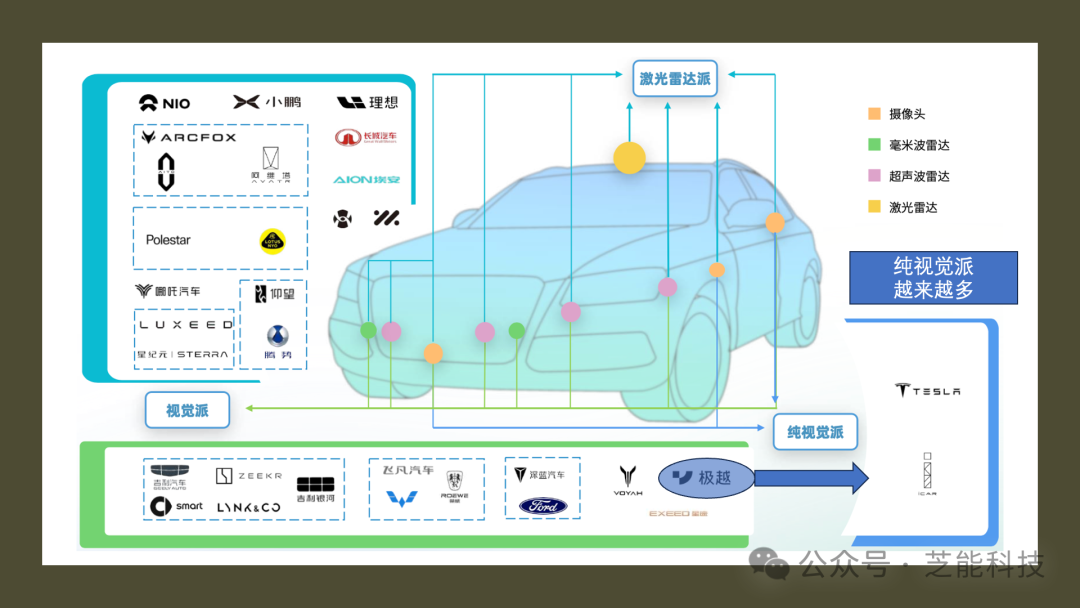
● 阵营划分:智能驾驶产品的传感器方案和高精地图使用成为阵营划分的主要依据。根据是否依赖高精地图,可分为有图派和无图派。
芝能点评:这里也有很大的争议,先抛出来,大家一起讨论。

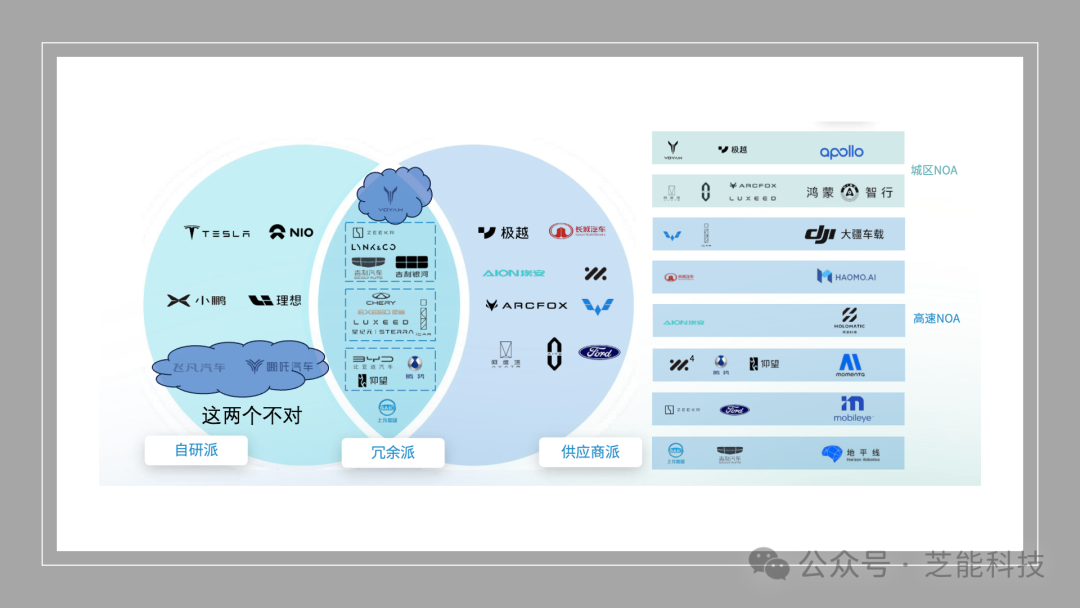
● 派系划分:从提供方角度,领先一代和次世代的玩家可分为自研派、供应商派和冗余派。供应商又分为城区NOA和高速NOA两个梯队。
芝能点评:在这里也有很多的变化和争议。
小结
智能驾驶技术正在不断演进,市场竞争逐渐激烈。随着价格下探和产品功能不断增强,智能驾驶有望在未来成为汽车行业的主流。中国智能驾驶产业将继续迭代创新,推动整个行业向前发展。
审核编辑:黄飞
-
从先进驾驶辅助系统到无人驾驶2016-10-27 0
-
聚焦智能驾驶与金融大数据,2017吉林松花湖william hill官网 8月召开2017-06-27 0
-
智能驾驶和物联网产品及解决方案2020-10-23 0
-
如何进行智能驾驶算法开发?2020-12-15 0
-
智能驾驶开发及测试评估平台分析2020-12-16 0
-
智能驾驶全量数据感知及分析系统2020-12-31 0
-
智能驾驶数据后处理分析利器INTEWORK-VDA介绍2021-01-13 0
-
智能驾驶测评工具组的用途2021-02-03 0
-
如何实现无缝驾驶的智能系统?2021-03-09 0
-
智能驾驶的狂想与现实落地 精选资料分享2021-07-27 0
-
智能天线的基本概念2021-08-05 0
-
智能驾驶数据网络时间同步2021-09-03 0
-
智能驾驶域控制器的SoC芯片选型2022-08-11 0
-
华大北斗高精度芯片助力上汽名爵MG7智能驾驶2023-08-30 0
-
智能驾驶与自动驾驶的关系2024-10-23 670
全部0条评论

快来发表一下你的评论吧 !
