
资料下载


×
视觉追踪机器人设计
消耗积分:0 |
格式:pdf |
大小:2599KB |
2017-06-27
bbqws60
分享资料个
使用Pixy cmucam5设计视觉追踪机器人
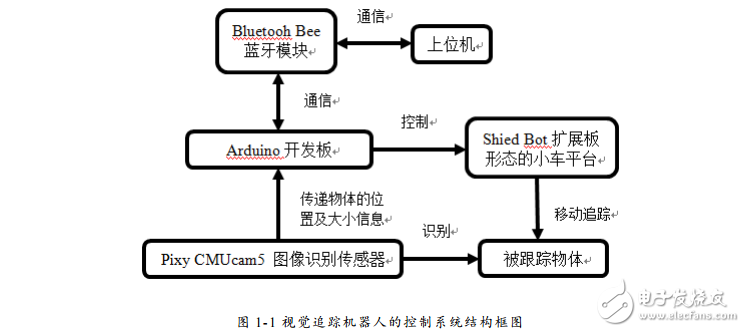
本次视觉追踪机器人的整体设计方案简单明了,通过 Pixy CMUcam5 图像识别传感器识别物体(如兵乓球),然后再由控制器 Arduino 开发板通过 I/O 端口控制 Shield Bot 扩展板形态的小车平台进行移动追踪物体,并与物体保持一定的距离。最后有添加了 Xbee 扩展板 V03 和 Bluetooh Bee 蓝牙模块,以控制小车的运行模式,使小车能在视觉追踪和手动控制两种模式下切换。
设计的基本步骤本次设计的基本步骤为:
(1)根据设计的要求,准备好视觉追踪机器人的各个系统组成部件并确定一个控制方案;
(2)将各个部件组装成一台视觉追踪机器人;
(3)根据所设计的控制方案,编写程序;
(4)将程序上传,并调试和修改程序以实现控制功能;
(5)程序定型,完成本次设计。
系统基本组成
本次设计视觉追踪机器人主要由 Arduino 开发板、Pixy CMUcam5 图像识别传感器、Shield Bot 扩展板形态的小车平台以及 Xbee 扩展板 V03 和 Bluetooh Bee 蓝牙模块组成。视觉追踪机器人的控制系统结构框图如图 1-1 所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




