
资料下载


×
高速Arduino遥控车开源分享
消耗积分:2 |
格式:zip |
大小:0.26 MB |
2022-10-27
打马过草原
分享资料个
描述
几天前,我从童年时代发现了一辆漂亮的遥控车,但它的遥控器坏了,所以我想为什么不把这辆车改装成高速 Arduino 遥控车。
所以现在就在这里,我已经把它变成了一辆高速 Arduino 遥控车,今天我将与你分享我是如何做到的。我用于这个项目的应用程序可以从这里下载。
高速 Arduino 遥控车的功能
这款高速 Arduino 遥控车的功能如下
- 前灯
- 背光灯
- 中心的 RGB 灯会让它看起来不错
- 喇叭
- 全方位旋转
- 速度控制
所需组件
高速 Arduino 遥控车所需的组件如下
- 带电机的旧车
- 阿杜诺
- HC-05 或 HC-06 蓝牙模块
- L298N电机驱动器
- 蜂鸣器
- RGB LED
- 2 个红色 LED
- 2 个白色 LED
- 2 X 3.7V 可充电电池
- 9V电池
- 7 X 220 欧姆电阻
硬件
我使用了两个 3.7V 的可充电电池来运行这些电机。这些电池可以反复使用,也可以快速运行电机。
如果您想了解更多关于 Arduino 与 RGB 模块接口的信息,请阅读本教程 | Arduino RGB LED 教程
如果您想了解更多关于蓝牙模块与 Arduino 接口的信息,请阅读本教程 | Arduino蓝牙模块教程
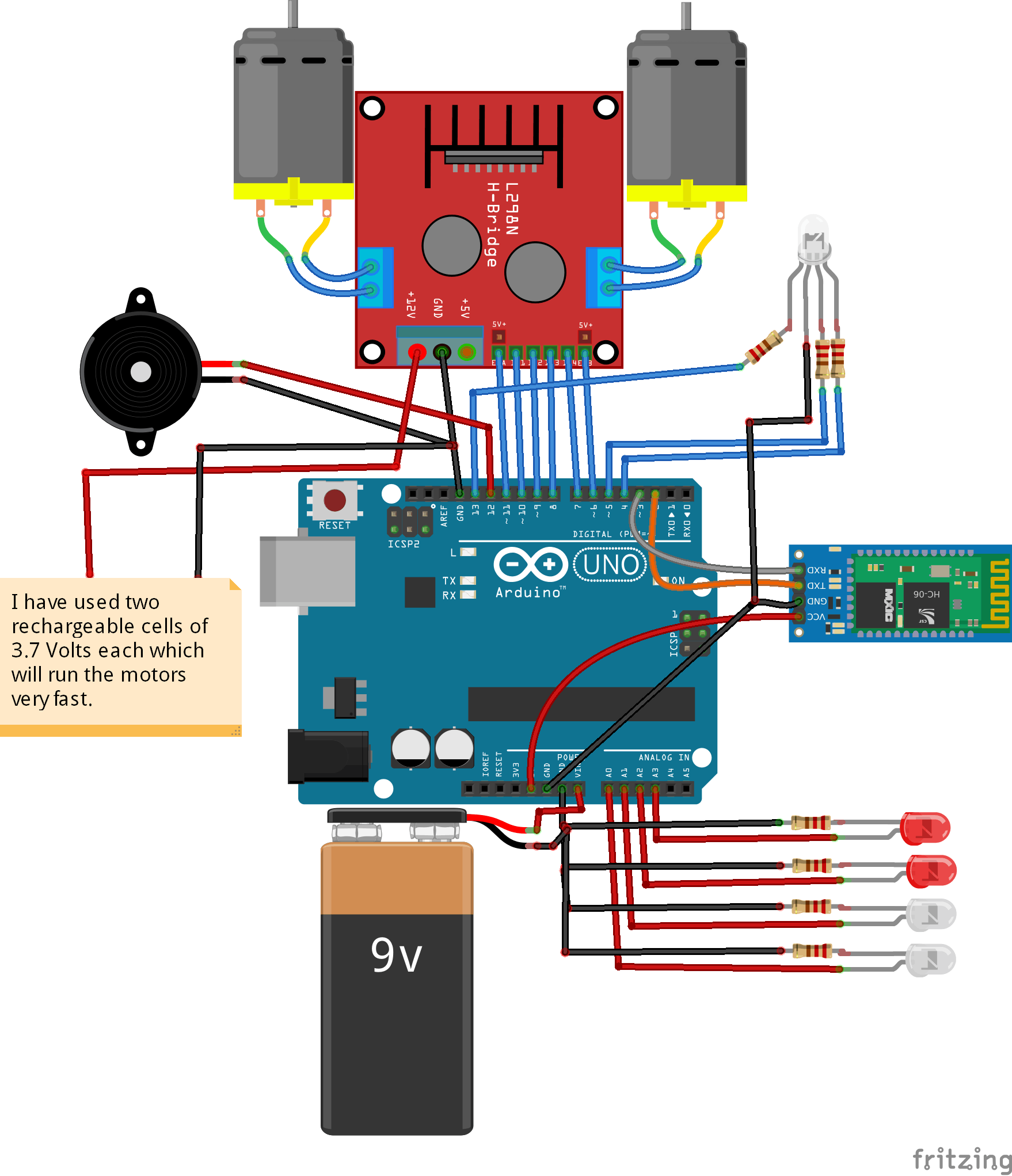
按照上面的威廉希尔官方网站 图完成所有连接后,我的汽车连接威廉希尔官方网站 如下图所示。
将顶部车身安装在其上后,这辆车看起来就像一辆原始的兰博基尼。中间连接的RGB让它看起来更漂亮,它的高速使它可以与市场上的遥控车竞争。



代码
//including the libraries
#include // TX RX software library for bluetooth
#include
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






