
资料下载


×
非接触式洗手开源项目
消耗积分:0 |
格式:zip |
大小:0.13 MB |
2023-06-30
贾飞小
分享资料个
描述
一、简介
该项目是在不接触泵的情况下洗手的各种方法之一。相反,我用我的手作为障碍物。 )。
2. 示范
3.威廉希尔官方网站
- 3.1 组件
1. 红外收发器
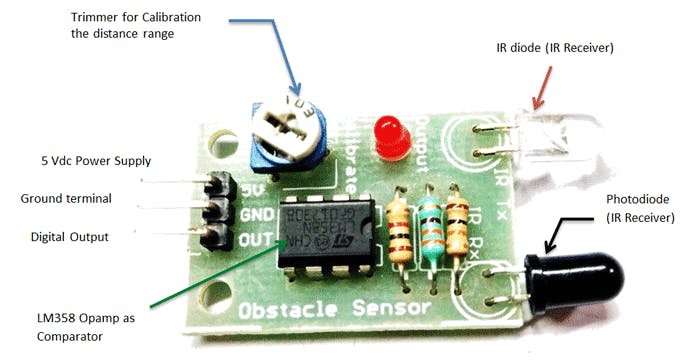
IR 收发器引脚分配
2.微伺服

伺服管脚
- 3.2 连接
威廉希尔官方网站
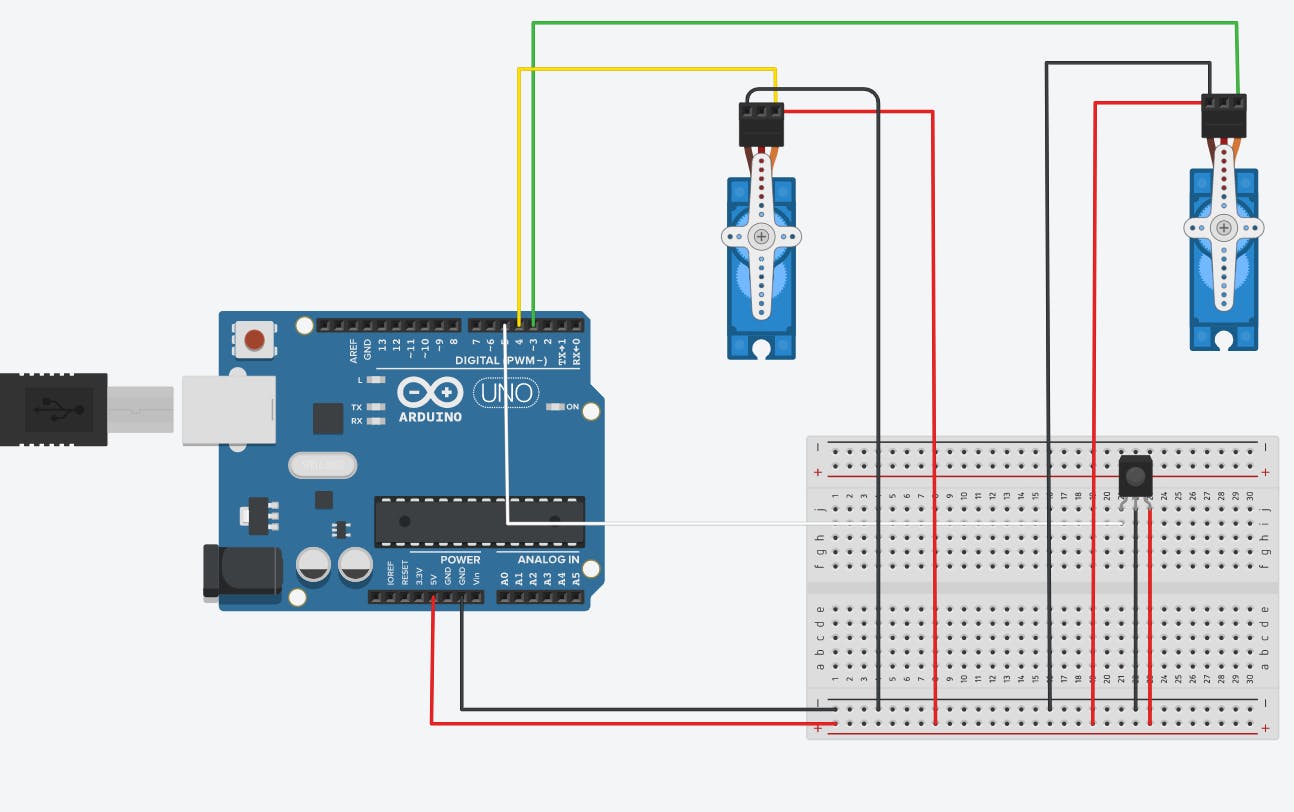
连接
>>将两个舵机的“红色”线连接到+5V,将“棕色”线连接到Gnd。
>>将一个舵机的PWM线连接到GPIO pin 3,另一个连接到pin 4。
>> 将 IR 收发器的输出连接到引脚 5(并分别进行电源和接地连接。)。
3. 设置
拿起洗手瓶,用胶枪将两个伺服电机粘在泵的两侧。在泵头顶部连接一个钩子,并将螺纹紧紧地系在两个伺服臂上,这样螺纹就不会松动。确保两个舵机最初都是 0 度。将红外传感器放在瓶子旁边。
4. 代码
#include
Servo s1,s2;
void setup()
{
s1.attach(3);
s2.attach(4);
pinMode(5,INPUT);
}
void loop()
{
s1.write(0);
s2.write(0);
if(digitalRead(5)==1)
{
s1.write(180);
s2.write(180);
delay(500);
}
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




