
资料下载


如何设计具有自学习循路功能的轮式移动机器人模型的方法资料说明
分享资料个
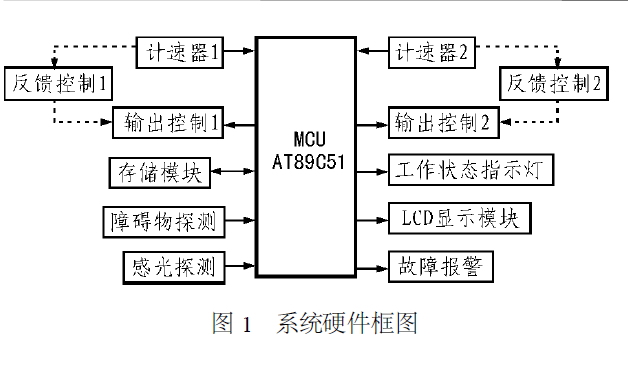
介绍了一种具有自学习循路功能的轮式移动机器人模型的设计方法。该模型由两后轮作驱动轮来控制前进速度和方向,并可在道路学习时以数据形式记录和存储两轮的瞬时速率,然后再由微控制器MCU输出控制信号来驱动后轮以实现道路的循迹。
随着科学技术的不断发展,机器人技术在航天、海洋、军事、建筑、交通、工业及服务业等领域已经取得广泛的应用和发展。而在一些特殊场合(如航天、深海作业及核工业等领域) , 以无人探察车、无人排险车及无人运输车等为代表的机器人技术越来越受到关注。为此,笔者设计了一种具有道路记忆功能、使用灵活方便、应用范围较广的轮式移动机器人模型。
该机器人模型以微控制器MCU为核心,先由人对机器人模型按照所要行走的路线进行训练, 即让机器人模型记忆该路线(将路线数据存储在存储器中) 。以后机器人模型就可沿此路线重复行走。其记忆路线的方式灵活方便, 可根据不同的要求和需要对其进行不同的路线训练以完成不同的任务。
该模型可以应用于一些人类不宜活动或较难控制的场合(如微型核反应堆的金属罐管系统、火场探测、辐射、消防、有毒、易燃、易爆物体场所的探测等) , 也可作为室内服务机器人使用, 以代替人完成家务劳动、厂区货物搬运、医院病历及资料的传递等。
该机器人模型具有以下特性:
●具有道路学习记忆和道路循迹重复功能;
●可模拟地图仿真训练, 输出放大倍数可按需要设定;
●在实际工作时,如遇到障碍物,可采用道路转移法绕过障碍物并沿原学习道路继续前进;
●工作时无人控制;
●光线较暗时会自动打开光源;
●前进距离可用LCD 实时显示;
●运动状态可用指示灯实时显示;
●具有系统故障报警功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





