




相关推荐
评论0
2945 52
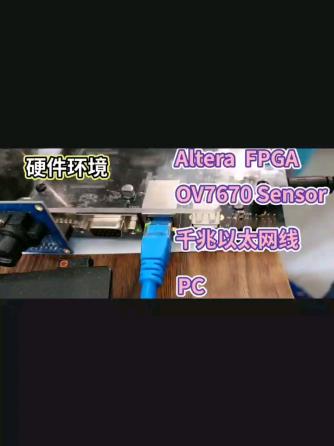
FPGA实现千兆网UDP协议图传,上位机显示
 kang
kang
2206 69
学unity之可视化上位机交互 或者说数字孪生?
 ZSH实验室
ZSH实验室
1733 43
自制喷水闹钟,每天准时滋醒你。 #GD32f103 #CubeMX #stm32 #上位机制作
 平韵の硬声小分部
平韵の硬声小分部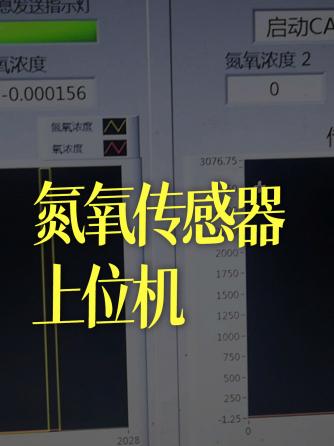
1101 89
labview实战——氮氧传感器上位机#跟着UP主一起创作吧 #硬声新人计划 #造物大赏
 秋刀烤鱼
秋刀烤鱼
1091 98
开源源码 使用FPGA构建机器人 并结合了ESP8266和python上位机 记录和分享经验
 田小花
田小花
975 173
智能电磁信号分析系统上位机
 爱转的光凌
爱转的光凌
684 55
基于89c52实现串口通信 采集电压并且通过AD转换在上位机和数码管上现实
 jf_28920065
jf_28920065
510 15
【ADO】 六轴机器人(6轴机械手臂) + DIY+滑台+上位机软件
 最美不過是回憶
最美不過是回憶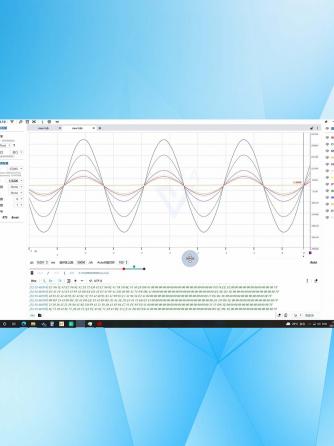
327 20
使用伏特加上位机加速数字电源调试
 杨帅锅讲电源
杨帅锅讲电源
293 38
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线模式切换
 正运动技术
正运动技术
264 22
#硬声创作季 基于openwrt视频监控智能小车上位机设计
 Mr_haohao
Mr_haohao
253 13
#工程师的通关秘籍 #机器学习 仪表上位机软件开发
 jf_10737536
jf_10737536
233 11
一个扫码枪如何对接多个上位机软件
 学习电子知识
学习电子知识
414 12
【ADO】六轴机器人上位机,提供和下位机的通信协议~可运动仿真
最美不過是回憶
272 13
EtherCAT超高速实时运动控制卡XPCIE1032H驱动安装# 运动控制卡# 正运动技术# PCIE
正运动技术
243 13
硬件位置比较输出和编码器锁存:EtherCAT超高速运动控制卡XPCIE1032H上位机C#开发 #正运动
正运动技术
242 24
正运动部件库的下载路径以及在eplan软件中的查看指南# 电气设计# 运动控制器# 运动控制卡# 正运动技术
正运动技术
241 11
自定义电子凸轮曲线的运动:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发 #人工智能
正运动技术
238 14
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
正运动技术
237 11
超高速PCle实时运动控制卡XPCIE1028 ,实现15000+pcs/分钟的IO触发检测速度!# 视觉筛选
正运动技术