

无人驾驶汽车技术原理与实现
智能驾驶
描述
无人驾驶汽车是一种智能汽车,也可以称之为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。
无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。
它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景 。
随着汽车技术的快速发展,带动行业对自动驾驶、无人驾驶的认识渐渐趋于理性,关注点由最开始一味地热炒概念、画大饼转为自动驾驶相关技术的开发,如传感器技术、信息处理、智能互联、人机交互、生物识别等。其中,车载激光雷达作为应用于自动驾驶汽车最重要的传感器之一,由于可以精准测量、识别和跟踪目标物,帮助自动驾驶汽车避开障碍物,对于保证自动驾驶汽车行车安全具有重要意义,正吸引越来越多企业的关注和加入。
目前来看,车载激光雷达领域,以老牌企业Velodyne技术最为成熟,产品种类最为丰富。此外,像国外的Waymo、Quanergy以及速腾聚创、巨星科技、镭神智能等自主品牌,也在积极布局,开发新技术、新产品,共同推动车载激光雷达进入小型化、低成本化时代。
车载激光雷达工作原理
所谓车载激光雷达就是通过发射和接受激光束,分析激光遇到目标对象后的折返时间,计算出目标对象与车的相对距离,并利用此过程中收集的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息,快速复建出被测目标的三维模型及线、面、体等各种图件数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。目前市场上比较常见的有8线、16线和32线激光雷达,64线产品也有,不过相对较少。从效果上来讲,激光雷达线束越多,测量精度越高,安全性也越高。
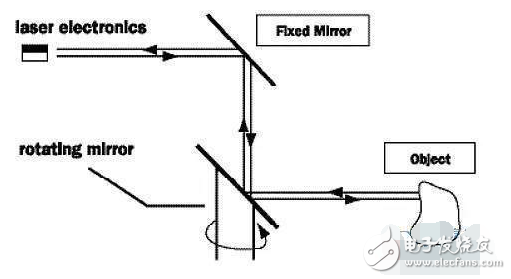
图 激光雷达工作原理
激光雷达扫描生成的图像
与其他汽车感应识别技术相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率,探测精度高;探测范围广;抗干扰能力强;获取的信息量丰富,可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;能全天时工作,不依赖于外界光照条件或目标本身的辐射特性。
但另一方面,激光雷达线束越多,价格也越昂贵,这是其劣势之一。此外,激光雷达容易受天气影响,在雨、雪、雾天气条件下性能较差,尤其在下雪天,利用激光雷达感知周围环境或导航时,会出现摄像头无法识别车道线、无法绘制有效的环境地图等情况,难以保证行车安全。这也是为什么现在很多研发自动驾驶汽车的企业在测试时,没有专门针对雪地和极端低温环境做测试的原因。
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 0
-
中国无人驾驶汽车市场将具有更大优势2016-06-13 0
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 0
-
无人驾驶电子与安全2017-02-22 0
-
2017全球无人驾驶汽车展2017-02-22 0
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 0
-
无人驾驶汽车的未来会怎样?2018-10-19 0
-
无人驾驶汽车的关键技术是什么?2020-03-18 0
-
汽车技术变革的重大影响有哪些?2020-05-01 0
-
无人驾驶分级及关键技术2021-01-21 0
-
无人驾驶汽车的工作原理是什么?2021-06-28 0
-
沃尔沃将向其它汽车制造商出售无人驾驶汽车技术2016-11-02 748
-
巧用大数据 福特开启无人驾驶汽车技术发展2016-11-11 737
-
无人驾驶汽车技术实现2017-11-12 11538
-
无人驾驶汽车技术_无人驾驶汽车关键技术_无人驾驶汽车技术原理2018-01-08 29580
全部0条评论

快来发表一下你的评论吧 !
