

单电阻三电阻FOC电机控制开源板调试及硬件威廉希尔官方网站
电子说
描述
STEVAL-05FM1(基于030C8T6)单电阻三电阻FOC电机控制开源板调试文档详细说明
(主芯片:STM32F030C8T6)
一、硬件说明
1.1图纸说明
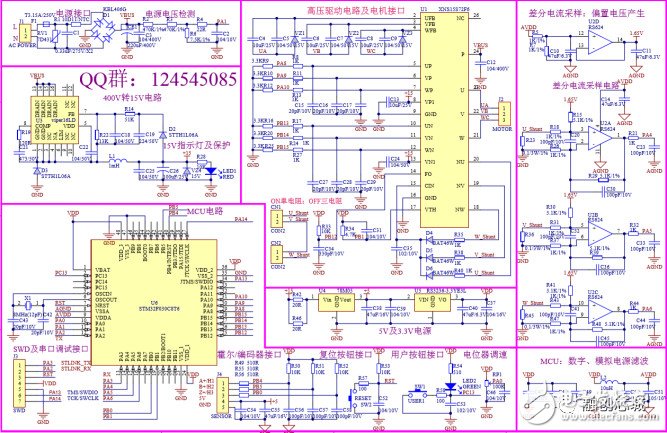
5V稳压威廉希尔官方网站 :就给霍尔传感器或编码器供电用,如果是无感启动不用;
尽量选择高频率DCDC的转换芯片,频率越低更容易引入一些噪声;
IPM模块:选的是国产600V/15A,国产IPM模块最好留至少5倍余量,也就是尽量不要超过3A,如果是进口IPM模块至少3倍余量;
1.2硬件布线
电流采样一定要采用差分走线;特别是地线(电流采样威廉希尔官方网站 适当的加滤波电容);
PWM输出线和电流采样线尽量不要交叉;
1.3安全说明
*电源输入供电:采用隔离变压器或隔离的交流电源或隔离的高压开关电源供电;
*电脑供电:尽量用笔记本电脑,且电脑的电源不用接(用电池供电,避免电源的地都通在一起,烧坏笔记本或端口);
*仿真器或调试器:通过USB隔离或采用隔离的仿真器;
*示波器调试说明:尽量用电池供电示波器或示波器的电源线接地线不要接(三芯插头中间的接地线);
*板子及带电端口:不要用手触摸,以免被电到。
1.4接线说明
板子
V+:接电源正+
V-:接电源正-
U:接电机U或A
V:接电机V或B
W:接电机W或C
HA:接电机霍尔传感器U或编码器A(对应550W伺服电机编码器:4脚)
HB:接电机霍尔传感器V或编码器B(对应550W伺服电机编码器:3脚)
HC:接电机霍尔传感器W(对应550W伺服电机编码器:2脚)
GND或0V:接电机传感器接口GND(对应550W伺服电机编码器:5脚)
+5:接电机传感器接口5V(对应550W伺服电机编码器:14脚)
ST LINK的SWD及串口接线说明:
按上图所示一对一接线即可(ST LINK背面朝向),RST和3.3V电源可不接。
二、软件说明
新建工程板子选择
底板选择:
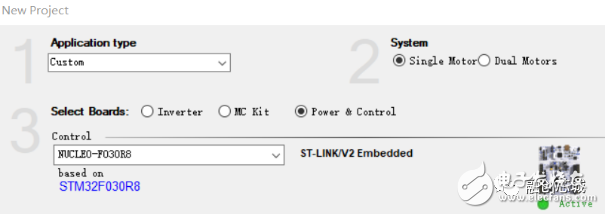
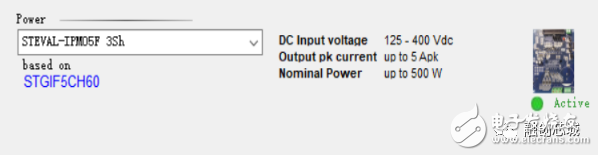
驱动板选择:
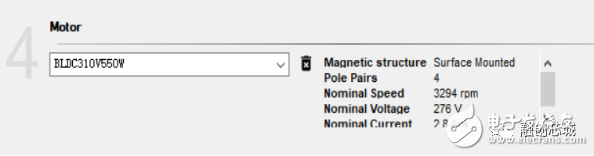
选择对应的电机参数
保存工程到需要的文件夹:

关闭温度检测接口(如硬件有用到则加上):
电机设置(双击打开电机图标)

如果是HALL接口打钩霍尔接口并输入霍尔角度;
如果是编码器接口打钩编码器接口并线数;
如果是无感可跳过;

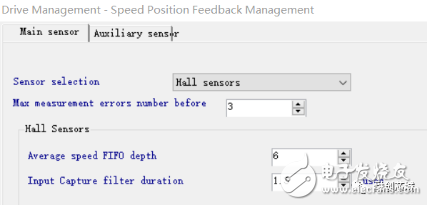
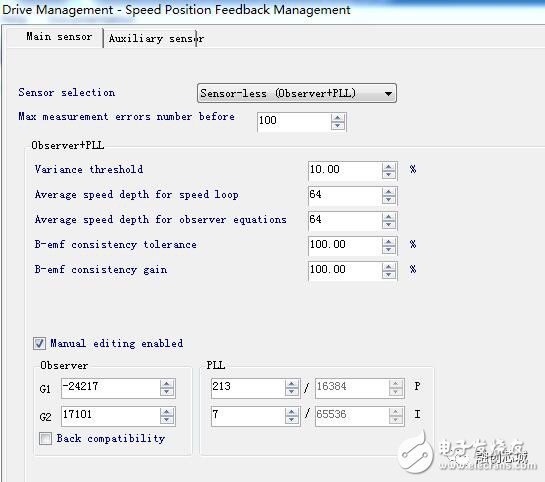
速度反馈接口设置(默认无感,无感可跳过)

比如设置HALL接口
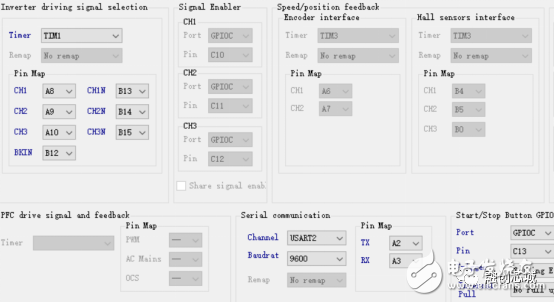
数字IO口设置点开下面图片:
根据硬件图纸设计端口进行设置:
PWM输出端口设置:
刹车输入端口设置:
HALL或编码器接口设置(无感启动则无法设置):
串口波端口及波特率设置:波特率改为9600
串口端口引脚设置:
按键启动/停止端口设置:
设置参考如下图所示:
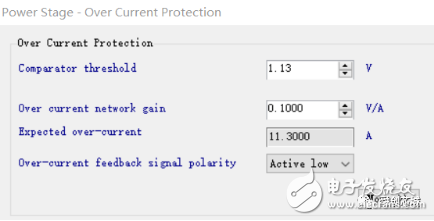
比较器过流设置
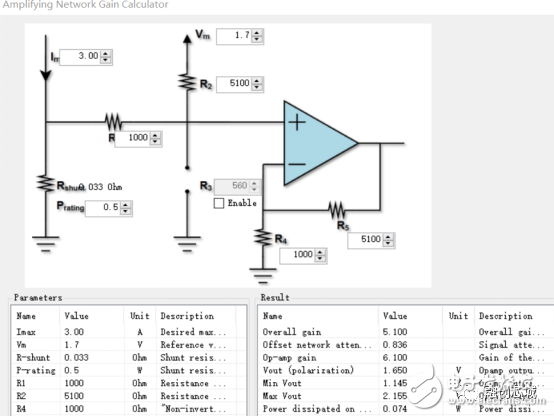
AD采样电流放大倍数设置(如果是单电阻则改为单电阻,并修改电流采样电阻值,单电阻还要除3,并把板子上CN1和CN2用短路帽短接)
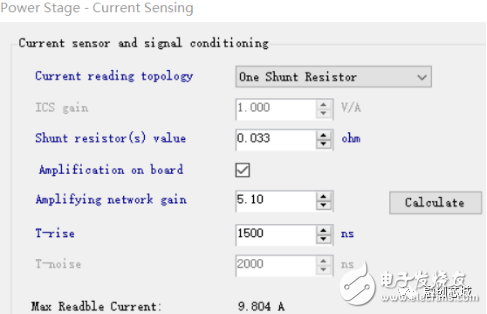
AD采样电流放大倍数设置界面值修改
AD采样电流放大倍数设置好保存
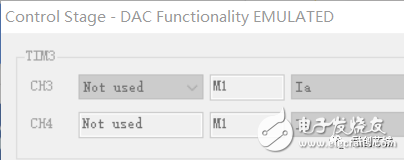
DAC功能设置打开图标:
全部选择关闭(F0无DA)
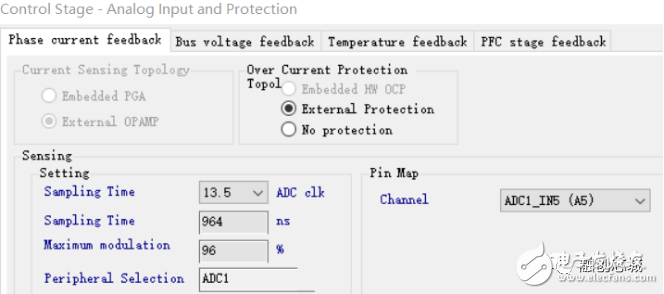
模拟输入及保护设置:
母线电压采样根据图纸进行设置(PA1):
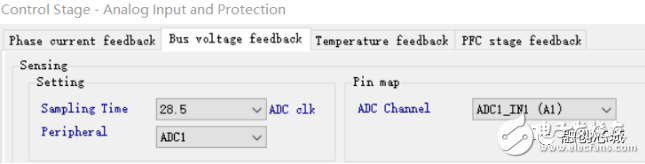
AD采样时钟及UVW相电流采样端口设置:
根据硬件图纸:
U对应PA4:
V对应PA5:
W对应PA6:
三电阻则根据UVW顺序设置为PA4、PA5、PA6
单电阻则设置为PA5;
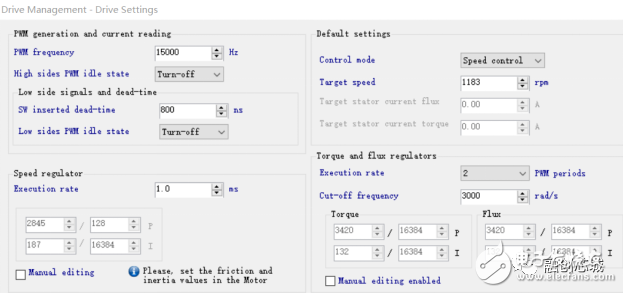
驱动界面设置(F0内核计算能力有限):
降低PMW频率:设置为16K以下
死区时间:默认为800nS,用的国产芯片可改为1200nS
目标速度:设置为1183,可设置为额定速度的15%到85%左右,太低会无法启动;太高启动电流太大;
PWM计算周期:改为2,F0计算太慢
截止频率:改为3000左右,由于单电阻和F0计算慢取2000或1000;
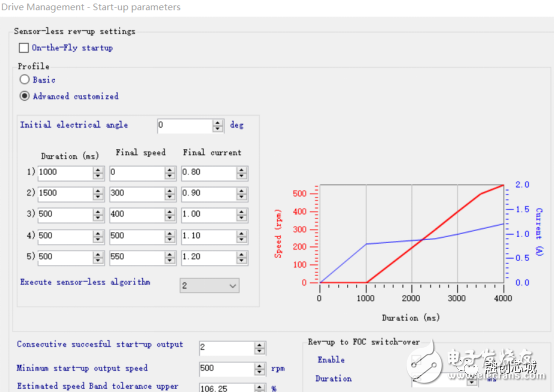
无感启动界面设置
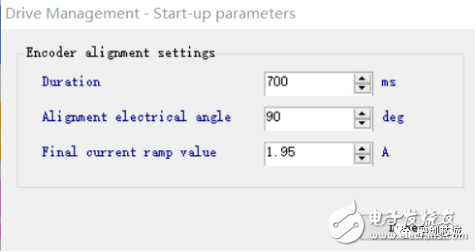
有感编码器启动设置(电流可以根据实际需要设置大些)
如无其它修改则生成工程(选择相应的工程文件)
生成按钮:
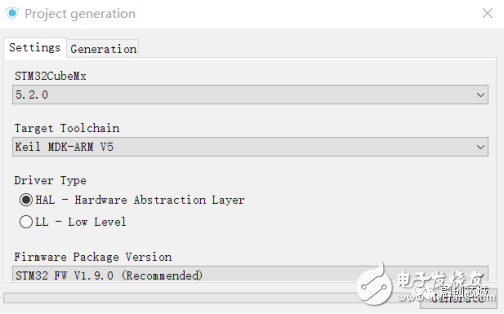
等待生成工程完成
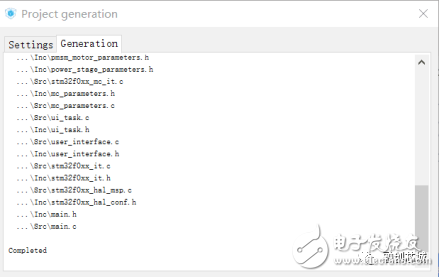
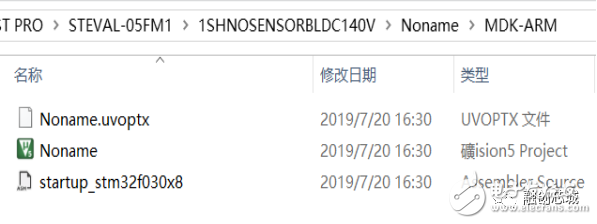
在对应的存放目录下,打开生成的MDK工程文件
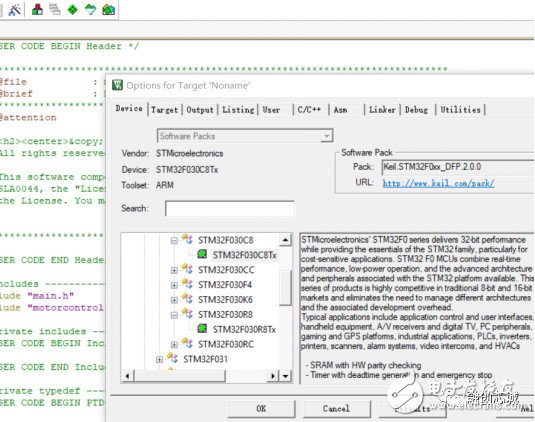
点击魔术棒,并打开Device界面,更改芯片为 STM32F030C8T6:
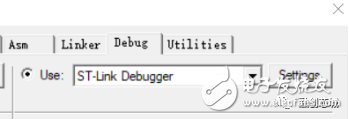
设置仿真下载接口为st link
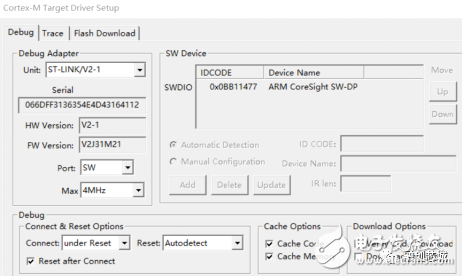
选择仿真接口为SWD速率为4M
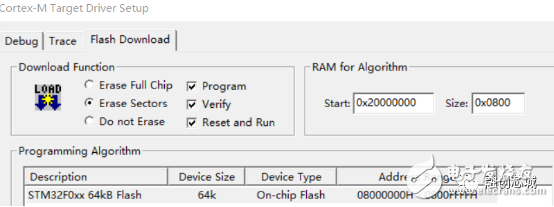
添加芯片FALSH的加载算法
点击KEIL MDK的编译按钮编译程序
点击load下载程序(先连接好线和电源,再通电)。
正常下载程序后,通过按板子的USER1按钮,即可启动电机;
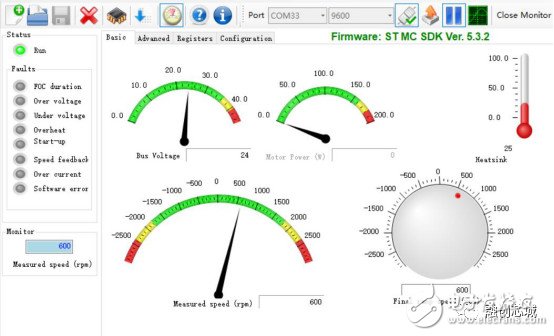
点击WORKBENCH的GUI按钮进行在线串口调试
或通过WOROBENCH的在线调试界面调试,选择相应的串口,波特率设置为9600
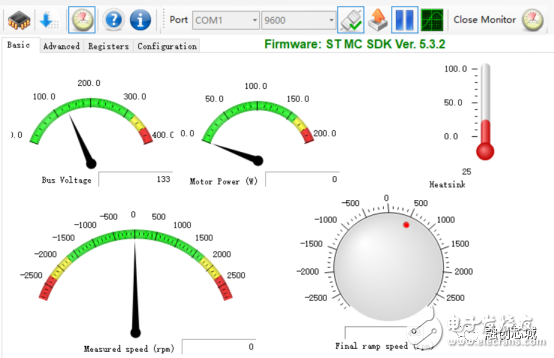
如无问题点击start按钮或板子的蓝色按钮即可正常转:
正常转如下图所示
三、调试补充说明
最好先确定下电机参数(电机找电机厂或自己测试或用我们IPM05F+NUCLEO-F303RE板子进行测试)。
首先,需要再次确认ST MC Workbench中所有设置的参数是否和实际的硬件
参数一致:如电机的相关参数,驱动部分的参数,单片机IO设置等。
• 如果有其中任意一个参数设置错误,可能导致电机永远也无法正确启动。
• 如果有需要,可以让电机运行在开环模式,来测量Tnoise和Trise相关参数。
如果启动后立即出现硬件过流保护,可能由以下原因导致:
• 选择了错误的电流采样方式
• 选择了错误的电流采样参数:如取样电阻值,放大倍数, ICS增益, Tnoise, Trise等.
• 电流环的调节带宽过高:3电阻采样建议为2000rad/s, 单电阻采样建议为1000rad/s
• 由于布线受到干扰而导致误触发硬件过流保护,需要检查硬件设计。
如果出现电机只动一下,但是没有加速动作:
• 这种问题一般是因为开环电流不够大导致无法拖起转子加速,有时出现开环启动完成,
但报启动失败故障,这时:
• 需要减低加速率,或提高开环启动电流
如果以上方法可以解决,但是不能保证100%有效,请尝试增加定位功能。
如果转子可以转动并且有加速动作,但是还是会停止并且报“速度反馈失败”错误,可能由以下原因导致:
• 启动成功的限制条件过于宽松导致过早切入闭环。
• 如下的方法可以解决这样的问题:
• 提高“连续成功启动输出测试”值,正常情况下请不要大于5。
• 提高最小启动输出速度。
如果采用 以上方法导致开环的最终速度过高,或没有解决问题,可以尝试以下方法:
• 减少观测器的增益G2,它可以降低扰动对速度反馈的影响。
• 通常G2应该按照/2,/4,/6,/8方式来减少。
• 放宽观测器的收敛条件,这样使观测器更容易收敛:
• 使用新的电机库,可以设置速度变化波动为80%(PLL) ,或400%(Cordic)。
• 这种情况下需要增加反向电动势幅度与估算速度一致性的检查。
• 更改速度/扭矩的爬升率:根据实际负载和转子的惯性等情况,让加速度更加柔和,防止突然加速导致对反向电动势估算的扰动。
无感启动G2增益修改界面:
-
求助,关于FOC单电阻的电流采样问题求解2024-04-01 0
-
SPIN3201(STSPIN32F0)三电阻控制板:FOC电机驱动原理图/代码/调试文档等详细资料开源分享2019-06-10 0
-
STSPIN32F0 FOC控制板驱动大疆航模电机/单电阻/原理图/代码/调试说明等所有资料开源2019-06-14 0
-
SPIN3202控制板:单电阻FOC电机驱动原理图/代码/调试文档等详细资料开源分享 (主芯片STSPIN32F0A)2019-06-17 0
-
1小时搭建双FOC电机控制平台2020-04-13 0
-
三电阻FOC电机控制板电位器调速是如何移植的?2021-06-16 0
-
如何对IPM05F三电阻FOC电机控制板进行调试?2021-07-09 0
-
STM32 Foc开源算法是什么2021-09-06 0
-
基于103C8T6的双ICS FOC电机控制开源板调试2021-09-17 0
-
基于103C8T6的双ICS FOC电机控制开源板调试文档2021-11-09 0
-
基于STM32G431+IHM08V4三电阻FOC电机控制板调试文档分享2021-12-21 0
-
STEVAL-05FM1单电阻三电阻FOC电机控制开源板的硬件说明2021-12-30 0
-
STM32电机控制官方教程资料合集免费下载2019-09-10 1613
-
ad电阻原理图_STEVAL05FM1(基于030C8T6)单电阻三电阻FOC电机控制开源板调试文档详细说明...2022-01-10 520
-
foc单电阻采样时序的软件实现2023-12-28 1734
全部0条评论

快来发表一下你的评论吧 !
