

如何组装无线PS2遥控器4WD机器人车载套件
电子说
描述
第1步:汽车底盘和组装
您可以在该项目中使用任何机器人汽车底盘,只需更改硬件和程序即可根据您的机箱。我正在为此项目使用4WD机器人车载套件。
检查随附的视频以学习组装。
步骤2:组件
Arduino UNO
L298N电动机驱动器
PS2无线遥控器和接收器
18650可充电3.7 V电池x 2
电池/电池座
跳线
为电池充电/保护目的,您可以添加其他组件
用于2S的BMS
用于3S的BMS
步骤3:硬件连接
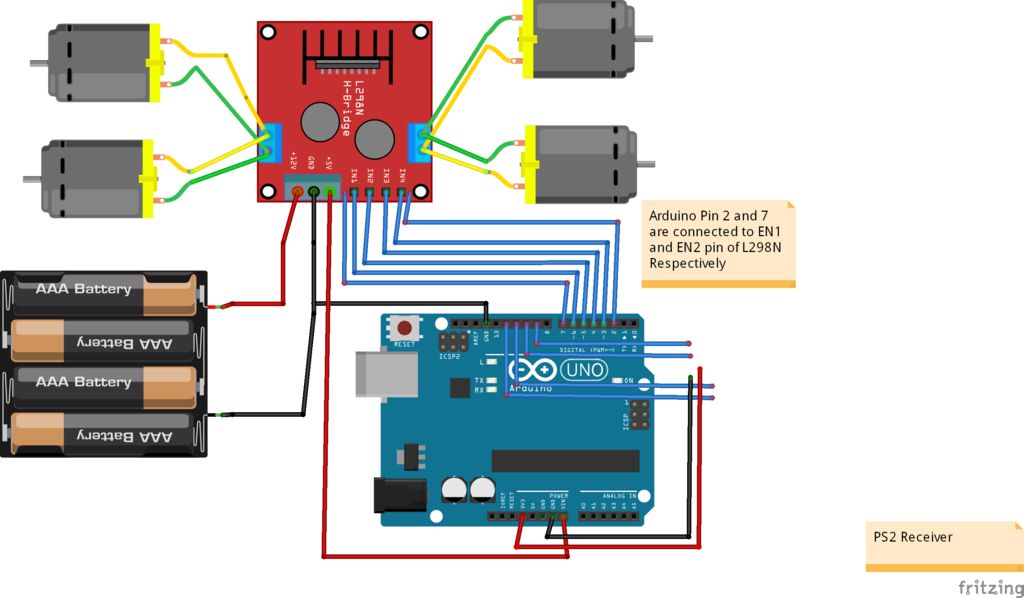

我还没有找到PS2接收器的一部分,所以我从Arduino Pins上取了一些线,我将解释它的连接,非常简单。
如您所见所附图片,我们使用PS2接收器(DATA,COMMAND,+ 3.3V,GND,ATTENTION,CLOCK)的6个引脚。
Arduino引脚------ ---------------- PS2接收器引脚
数据----------------------- ----------- Pin 12
命令-------------------------- Pin 11
+3.3V------------- --------------------- 3.3V Arduino引脚
GND ---------------- ------------------- GND
注意---------------------- --- Pin 10
CLOCK -------------------------------- Pin 9
第4步:编程部分
在您的Arduino IDE软件中添加附带的PS2控制器库,然后将代码上传到Arduino开发板中。
步骤5:注意
请检查随附的视频以及完整的过程。
您可以使用PS2遥控器上的两个操纵杆来控制汽车,按L1使用左操纵杆,按R1使用右操纵杆。
调试
请确保两个右侧电机在同一运行中方向和左侧电机也以相同方向运行。如果两个电动机都不沿同一方向运行,请从侧面更改任何一个电动机的极性。
如果向前推动操纵杆而汽车倒车,请更改电动机的极性,或者只需更改Arduino引脚。
责任编辑:wv
-
【mBot试用体验】开箱组装mBot机器人-Adam2015-12-05 0
-
擂台机器人2016-03-24 0
-
SONY无线PS2遥控手柄与stm32单片机之间进行通信2021-11-26 0
-
【开发教程2】人形街舞机器人-机体组装及测试2022-05-10 0
-
【教程2】人形街舞机器人-机体组装及测试2022-08-12 0
-
dfrobot切诺基4WD智能机器人开发平台介绍2019-11-21 1627
-
dfrobot海盗船4WD小车机器人套件介绍2019-12-19 1497
-
dfrobotMiniQ 4WD教育机器人简介2019-12-23 1467
-
PS2无线遥控手柄的使用说明书免费下载2019-11-21 3914
-
PS2无线手柄遥控器的资料合集免费下载2020-03-30 2668
-
SONY无线PS2遥控手柄与stm32单片机通信2021-11-18 953
-
Micropython——使用PS2手柄实现远程遥控2021-12-04 1234
-
遥控玩具或机器人三通道遥控器2022-07-11 456
-
4WD/2WD自动避障车/蓝牙控制车开源2022-11-07 458
-
4WD智能机器人汽车开源2022-12-06 374
全部0条评论

快来发表一下你的评论吧 !
