

Firefly-RK3288--DVP开发板介绍
描述
Firefly-RK3288-Reload 开发板带有一个 DVP 摄像头接口。 本文以 OV5640 摄像头为例,讲解在该开发板上的配置过程。
与摄像头相关的代码目录如下:
- Android:
`- hardware/rockchip/camera |- Config | `- cam_board_rk3288.xml // 摄像头的参数设置 |- CameraHal // 摄像头的 HAL 源码 `- SiliconImage // ISP 库,包括所有支持模组的驱动源码 `- isi/drv/OV5640 // OV5640 模组的驱动源码 `- calib/OV5640.xml // OV5640 模组的调校参数 - kernel
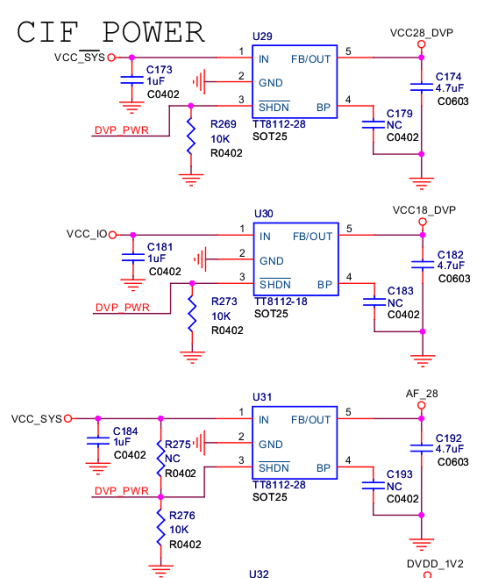
|- kernel/drivers/media/video/rk_camsys // CamSys 驱动源码 `- kernel/include/media/camsys_head.h 设置摄像头相关的引脚和时钟,即可完成配置过程。 从以下摄像头接口原理图可知,需要配置的引脚有:VCC28_DVP、VCC18_DVP、VCCIO_YUV、PWDN(FLASH0_CLE)、RESET 和 XCLK1。
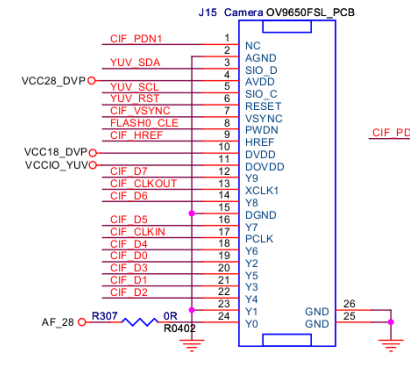
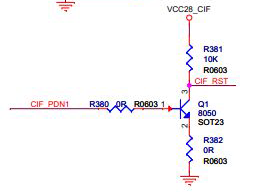

PWDN、RST 对应 GPIO3_B4、GPIO2_B7 引脚
修改 hardware/rockchip/camera/Config/cam_board_rk3288.xml 来注册摄像头:
主要修改的内容如下:
- Sensor 名称
<SensorName name="OV5640" >SensorName> 该名字必须与 Sensor 驱动的名字一致,目前提供的 Sensor 驱动格式如下: libisp_isi_drv_OV5640.so 用户可在编译 Android 完成后在目录 out/target/product/rk3288_box/system/lib/hw/ 下找到该摄像头驱动文件。
- Sensor 软件标识
<SensorDevID IDname="CAMSYS_DEVID_SENSOR_2">SensorDevID> 注册标识不一致即可,可填写以下值:
CAMSYS_DEVID_SENSOR_1A CAMSYS_DEVID_SENSOR_1B CAMSYS_DEVID_SENSOR_2 - 采集控制器名称
<SensorHostDevID busnum="CAMSYS_DEVID_MARVIN" >SensorHostDevID> 目前只支持:
CAMSYS_DEVID_MARVIN - Sensor 所连接的主控 I2C 通道号
<SensorI2cBusNum busnum="3">SensorI2cBusNum> 具体通道号请参考摄像头原理图连接主控的 I2C 通道号。
- Sensor 寄存器地址长度,单位:字节
<SensorI2cAddrByte byte="2">SensorI2cAddrByte> - Sensor 的 I2C 频率,单位:Hz,用于设置 I2C 的频率。
<SensorI2cRate rate="100000">SensorI2cRate> - Sensor 输入时钟频率, 单位:Hz,用于设置摄像头的时钟。
<SensorMclk mclk="24000000">SensorMclk> - Sensor AVDD 的 PMU LDO 名称。如果不是连接到 PMU,那么只需填写 NC。
<SensorAvdd name="NC" min="0" max="0">SensorAvdd> - Sensor DOVDD 的 PMU LDO 名称。
<SensorDovdd name="NC" min="18000000" max="18000000">SensorDovdd> 如果不是连接到 PMU,那么只需填写 NC。注意 min 以及 max 值必须填写,这决定了 Sensor 的 IO 电压。
- Sensor DVDD 的 PMU LDO 名称。
<SensorDvdd name="NC" min="0" max="0">SensorDvdd> 如果不是连接到 PMU,那么只需填写 NC。
- Sensor PowerDown 引脚。
<SensorGpioPwdn ioname="RK30_PIN3_PB4" active="1">SensorGpioPwdn> 直接填写名称即可,active 填写休眠的有效电平。
- Sensor Reset 引脚
<SensorGpioRst ioname="RK30_PIN2_PB7" active="0">SensorGpioRst> 直接填写名称即可,active 填写复位的有效电平。
- Sensor Power 引脚。
<SensorGpioPwen ioname="RK30_PIN0_PB3" active="1">SensorGpioPwen> 直接填写名称即可, active 填写电源有效电平。
- 选择 Sensor 作为前置还是后置。
<SensorFacing facing="front">SensorFacing> 可填写 “front” 或 “back”
- Sensor 的接口方式
<SensorInterface mode="CCIR601">SensorInterface> 可填写如下值:
CCIR601 CCIR656 MIPI SMIA - Sensor 的镜像方式
<SensorMirrorFlip mirror="0">SensorMirrorFlip> 目前暂不支持。
- Sensor 的角度信息
<SensorOrientation orientation="0">SensorOrientation> - 物理接口设置
<SensorPhy phyMode="CamSys_Phy_Cif" sensor_d0_to_cif_d ="0" cif_num="0" sensorFmt="CamSys_Fmt_Raw_10b">SensorPhy> phyMode: Sensor 接口硬件连接方式,DVP Sensor 接口则为:CamSys_Phy_Cif sensor_d0_to_cif_d:Sensor DVP 输出数据位 D0 对应连接的主控 DVP 接口的数据位号码 cif_num:Sensor DVP 连接到主控 DVP 接口编号 sensorFmt:Sensor 输出的数据格式,目前版本仅支持填写 CamSys_Fmt_Raw_10b make menuconfig 然后将以下配置项打开:
Device Drivers ---> <*>Multimedia support ---> <*>camsys driver RockChip camera system driver ---> <*> camsys driver for marvin isp < > camsys driver for cif 最后执行:
make firefly-rk3288-reload.img 即可完成内核的编译
-
嵌入式开发与学习推荐——Firefly-RK3288开源硬件开发板2014-11-12 0
-
Firefly-RK3288开发板具有哪些功能呢2022-03-10 0
-
RK3399-firefly开发板原理图2017-09-16 2932
-
Firefly开发板多路视频编解码操作步骤2019-10-30 3181
-
Firefly-RK3288--教程2019-11-11 4553
-
Firefly-RK3399开发板2019-11-23 4771
-
Firefly-RK3399开发板介绍2019-11-23 3453
-
Firefly-RK3288开发板介绍2019-11-25 2979
-
Firefly-RK3288PWM输出介绍2019-11-25 2255
-
Firefly-RK3288MIPI CSI接口介绍2019-11-25 10245
-
Firefly-RK3288 LED介绍2019-11-25 2537
-
Firefly-RK3288--IR主板介绍2019-11-26 2849
-
Firefly-RK3288--I2C主板的使用介绍2019-11-26 2705
-
Firefly-RK328开发板ADC接口介绍2019-11-27 2434
-
Firefly-RK3288主板启动教程2019-11-27 6559
全部0条评论

快来发表一下你的评论吧 !
