

一种基于射频识别和无线传感网技术的分布式节点定位算法介绍
RF/无线
描述
0 引言
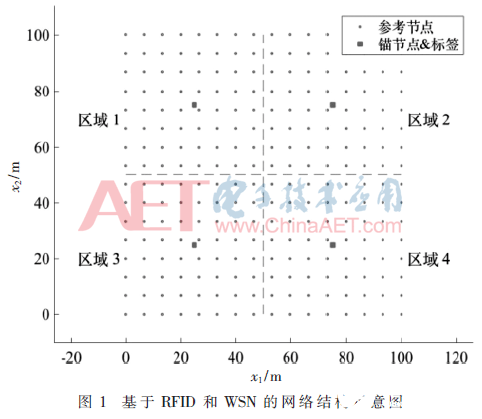
电子信息技术的发展极大促进了人类生活水平的提升和传统社会生活方式的变革。同时,人们对于美好生活的不断追求,也拉动了技术的发展进步。位置信息是当今人类活动所需的基本信息要素。在移动定位方面,以卫星导航为代表的定位技术是众多技术需求中的一个典型。近年来,无线通信技术、微机电技术正在发生迅猛变化,催生出了基于不同应用场景的新型定位技术,如基于红外、超声、蓝牙、WiFi、射频识别(RFID)、无线传感器网络(WSN)等定位方法。
RFID技术[1-2]的一个重要应用是目标的定位与跟踪。RFID诞生几十年,早已融入到了人们的日常生活中,尤其在工业领域的物流管理中得到了广泛的应用验证。RFID是一种非接触式的近距离自动识别技术,可方便快捷地标识物体。它通过射频信号实现数据的传输和目标的识别,具有体积小、抗干扰、速度快、成本低廉等优点,是室内定位、姿态识别、目标跟踪领域的研究热点[3-5]。WSN技术[6]同样可用于定位,其通过无线网络和传感器节点来实现移动目标定位与跟踪。它是由大量具有感知、处理和通信功能的传感器单元组成的大规模自组织网络,可灵活部署于待监测区域,实现对温度、电磁、压力、光强等多种数据信息的协作式感知,具有小体积、低功耗、低成本、自组织等优点。近些年涌现出多种基于无线传感网的定位方法[7-8],在军事、农业、工业、医疗等各领域具有广泛的应用背景。
值得注意的是,RFID技术和WSN技术在定位领域均存在一定的应用局限性[9-10]。RFID通信能力不足,感应距离也十分有限,即便主动标签的信号传输距离也仅有几十米。在利用接收信号强度(RSSI)来进行定位时,采用低廉的被动式标签会严重限制感应的距离,采用主动式标签则会增加使用成本。WSN则缺乏目标的快速标识与记录能力,且在大规模分布式网络中,丰富的环境感知和灵活的无线通信需耗费大量的网络资源。因此,针对上述问题,本文提出一种将具有标识能力的RFID技术与具有通信、传感能力的WSN技术相结合的网络定位方法,提升定位精度和定位效率。
1 问题描述
本文考虑一种结合RFID技术的分布式无线传感器网络,采用基于指纹信息(Fingerprinting)的非测距方法对网络中的移动节点进行定位。该网络是一种分布式网络,由Nz个区域组成,含有基于RFID技术的阅读器(reader)和标签(tag),以及基于WSN的锚节点(anchor)和运动节点(sensor)。移动传感器节点为待定位节点,可在网络中自由移动。其由携带阅读器(reader)的运动节点(sensor)组成,reader与sensor间可互为通信,将该节点记为xj(t)=(xj,1(t),xj,2(t)),j∈{1,…,Nx}。锚节点(anchor)为位置已知的传感节点,同时携带有标签(tag),将该节点记为ai=(ai,1,ai,2),i∈{1,…,Na}。在本文所述分布式网络中,每个区域仅含一个携带有标签的锚节点,且将该锚节点置于区域中心,因此,锚节点个数Na等同于网络区域个数Nz。
2 定位算法
网络中的移动节点同时携带有传感器和阅读器,其在监控区域中自由运动时,既要采集来自所有感知范围内的锚节点上传感器发送的RSSI信息,又要收集锚节点上标签的感应信息。下文首先介绍传统的基于指纹的定位算法,然后提出结合有RFID的定位算法,通过综合利用射频阅读器和标签的标识信息,实现在分布式无线传感网中更为精确有效的节点位置估计。
2.1 基于指纹的定位原理
2.2 基于RFID和WSN的分布式定位算法
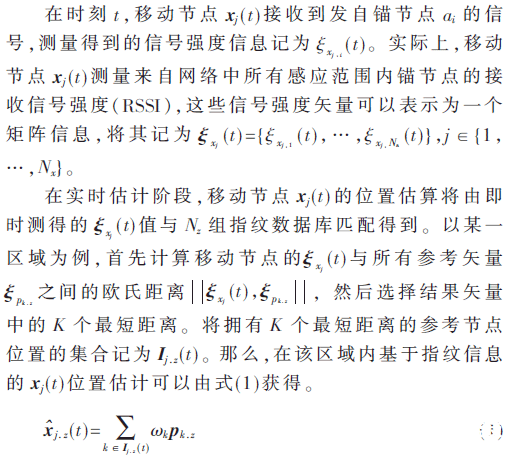
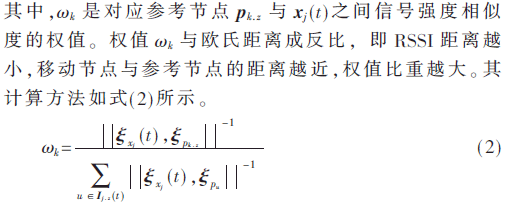
在传统的分布式网络定位中,每时刻移动节点将分别在Nz个区域内执行基于指纹的位置估计算法,根据每个区域的权重对各个区域的计算结果进行权值的再分配,从而得到估计结果。相比于这种较为耗能和耗时的方法,本文利用射频标签具有能够快速识别是否处于阅读器感应范围的能力,将RFID技术融入分布式网络的节点定位中。
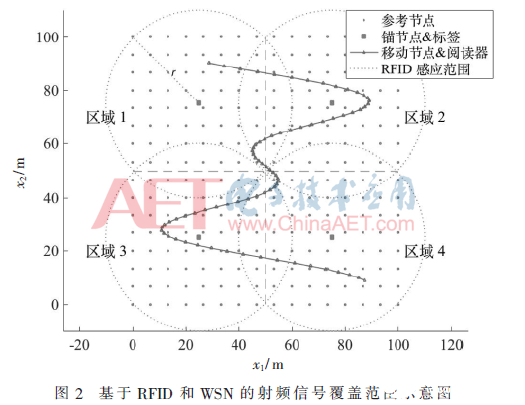
在网络建模阶段,与传统的基于指纹信息的节点定位方法相同,分别于Nz个区域测量在Np.z个参考节点位置上采集到的接收信号强度,得到Nz组指纹特征数据库。在移动节点实时位置估计阶段,先通过移动传感器节点携带的阅读器对网络范围内的射频标签进行感应,再与特征数据库实行匹配。由于阅读器与移动节点、标签与锚节点均分别集成于同一个节点上,将阅读器记为rj(t),j∈{1,…,Nx},将标签记为ti.z,i∈{1,…,Na},z∈{1,…,Nz}。假设阅读器与标签的最大感应距离为r,则标签ti.z能够被检测的范围是以标签ti.z为圆心、r为半径的圆形区域。r的取值使得该圆形区域完全覆盖标签所在的参考节点区域,如图2所示。因此,一旦移动节点进入某区域射频标签ti.z的感应范围内,则仅启用该区域数据库中的 测量值与实时测量数据
测量值与实时测量数据 进行位置匹配。
进行位置匹配。
综上,当移动节点xj在网络中自由运动时,在t时刻,基于RFID和WSN的分布式节点定位算法流程如下所述:
(1)当移动节点进入网络覆盖区域,节点上的阅读器向网络中发射射频信号,处于信号接收范围内的射频标签向阅读器作出应答,将所有感应到的标签的集合记为Uj(t)。
(2)当Uj(t)的数量为1时,表示仅有一个区域的标签被感应,则仅采用该标签所在区域的数据库进行位置的匹配与估计。
(3)当Uj(t)的数量大于1时,表示有多个区域的标签被阅读器感应,则采用所有被选择区域的数据库信息进行位置的匹配与估计。
(4)当且仅当Uj(t)的集合数量为空时,表示没有任何一个标签感应到此时的阅读器,即移动节点不在任何一个标签的有效感知范围内,此时采用传统的基于指纹的分布式传感器节点定位方法进行估算。
3 仿真结果
考虑一个100 m×100 m范围的无线传感网监视区域,该区域由Nz=4个规则分布的区域组成,其中,参考节点位置均匀地分布在各个区域。为方便演示,在每一时刻仅考虑一个待定位的移动节点,该简化不影响算法的一般性。假定移动节点在网络中四个区域内自由移动,产生运动时间为75 s的运动轨迹。移动节点同时携带有RFID阅读器,锚节点携带有RFID标签。将锚节点分别放置于4个规则划分区域的中心。将标签的感应范围数值r设定为35 m,可实现各区域射频标签信号的全覆盖。
接收信号强度RSSI的仿真值均依据Okumura-Hata模型[12],分别由锚节点和移动节点与参考节点之间的相对距离计算获得,如式(3)所示:
图3给出本文提出的定位算法的位置估算效果图。图中,三角+直线的标识代表移动节点的实际轨迹,虚线+星号的标识代表运行轨迹的估计值。均匀分布的参考节点位置由圆圈表示,锚节点和标签则由方形标识表示,以锚节点为圆心的虚线圆形表示每个区域的最大标签感知范围。本例中,设每个区域中均匀分布的参考节点数目为Np.z=225,所加入噪声的标准方差σr=0.2 dB,K近邻域算法的数目取为5。在上述条件下,移动节点位置估计误差为0.946 2 m。
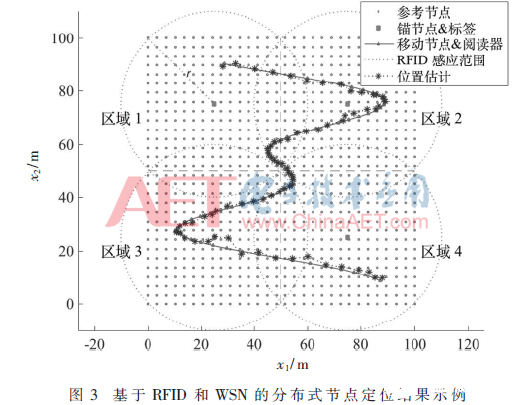
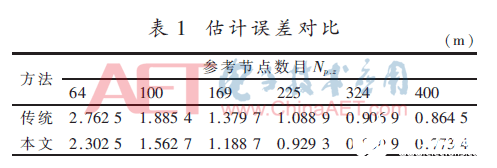
为进一步阐述算法的有效性,将本文所提算法与传统的基于指纹信息的分布式算法比较。依然考虑一个100 m×100 m监视区域,监控网络由Nz=4个规则分布的区域组成。待测移动节点运动轨迹如图3中三角+实线标识所示,接收信号噪声标准方差σr=0.2 dB,在同等节点分布条件下,仿真结果取100次试验的平均值。如表1所示,随着各分区域参考节点位置数目Np.z的变化,本文所提出方法的定位精度总是明显优于传统的分布式定位结果。该方法不仅提高了数据库利用的准确和有效性,还明显改善了处于区域边缘位置的移动节点的定位精度。
4 结论
本文提出了一种基于射频识别和无线传感网技术的分布式节点定位算法。在分布式传感网中,基于指纹数据信息匹配方法,引入射频识别阅读器和射频标签,利用射频识别技术的快速目标识别与响应能力,预先甄别可实时用于移动节点数据匹配的区域;同时,基于区域的预先识别与判定,在一定程度上避免了噪声干扰情况下处于区域边缘的参考位置的错误遴选,明显提升了移动节点定位的精度。尤其在大规模分布式无线传感网应用中,可有效节约网络资源,提升节点工作效率。
参考文献
[1] NI L M,LIU Y,LAU Y C,et al.LANDMARC:indoor location sensing using active RFID[C].IEEE International Conference on Pervasive Computing and Communications.IEEE,2003:701-710.
[2] ZHU X,MUKHOPADHYAY S K,KURATA H.A review of RFID technology and its managerial applications in different industries[M].Elsevier Science Publishers B.V.2012.
[3] 蒋皓石,张成,林嘉宇。无线射频识别技术及其应用和发展趋势[J]。电子技术应用,2005,31(5):1-4.
[4] SUBEDI S,PAULS E,ZHANG Y D.Accurate localization and tracking of a passive RFID reader based on RSSI measurements[J].IEEE Journal of Radio Frequency Identification,2017,1(2):144-154.
[5] SAAB S S,MSHEIK H.Novel RFID-based pose estimation using single stationary antenna[J].IEEE Transactions on Industrial Electronics,2016,63(3):1842-1852.
[6] AKYILDIZ I F,SU W,SANKARASUBRAMANIAM Y,et al.A survey on sensor networks[J].IEEE Communications Magazine,2002,40(8):102-114.
[7] PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the nodes: cooperative localization in wireless sensor networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[8] WANG C L,WU D S.Decentralized target positioning and tracking based on a weighted extended Kalman filter for wireless sensor networks[J].Wireless Networks,2013,19(8):1915-1931.
[9] 聂涛,陆阳,张鹏,等.RFID与WSN在物联网下协同机制的分析[J]。计算机应用研究,2011,28(6):2006-2010.
[10] 王绍丹,王宜怀,刘锴。基于射频识别和无线传感网融合技术的仓储定位方法研究[J]。计算机应用研究,2018,35(1):195-198.
[11] ROBLES J J,DEICKE M,LEHNERT R.3D fingerprint-based localization for wireless sensor networks[C].Positioning Navigation and Communication.IEEE,2010:77-85.
[12] HATAY M.Empirical formula for propagation loss in land mobile radio services[J].IEEE Transactions on Vehicular Technology,1980,29(3):317-325.
-
一种改进的无线传感器网络非测距定位算法2015-08-18 1285
-
将MCL算法应用于无线传感网络节点定位技术2018-11-16 0
-
无线传感器网络的节点定位怎么解决?2019-08-30 0
-
无线传感器网络节点自定位算法2009-04-20 549
-
一种无线传感器网络无测距分布式定位算法2009-04-23 783
-
一种无线传感器网络节点定位算法的改进2009-09-09 485
-
无线传感器网络分布式节点定位算法研究2010-01-18 495
-
一种面向无线传感器网络的分布式定位算法2012-05-22 541
-
基于无线传感器网络的车载节点定位2012-11-01 2072
-
基于改进APIT算法的无线传感器网络节点定位_戴天虹2017-03-19 945
-
基于射频识别和无线传感网的仓储定位2018-01-16 895
-
一种基于运动轨迹捕捉的WSN节点定位算法2021-05-12 693
-
新型的无线传感器网络异常节点定位算法2021-05-13 645
-
无线传感器网络节点定位算法研究与实现2021-05-24 817
-
基于果蝇算法的物联网节点定位改进方法2021-05-26 668
全部0条评论

快来发表一下你的评论吧 !
