
资料下载


小型仿人机器人系统的设计资料详细说明
mulberry56
分享资料个
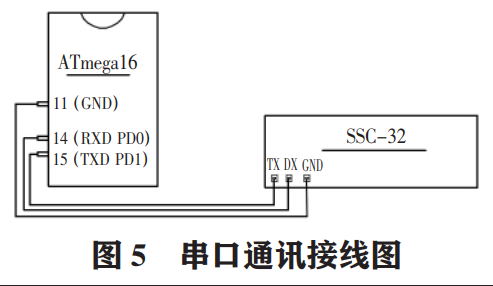
提出了一款新颖的小型开环控制双足行走机器人系统,该系统由机械系统、驱动系统和控制系统 3 部分组成。关节自由度为 21 个,比目前流行的小型机器人的 17 自由度增加了 4 个自由度,实现了机器人的协调稳定运动,SSC-32 舵机控制器的应用使机器人的运动程序编写更加便利,从而可以使设计人员把主要的精力用于动作的设计。
双足步行是高级生物所特有的运动形式。国外自 1960 年代以来就开始了双足步行机器人的研究,1972 年日本早稻田大学加滕一郎等首先研制出了 WL-5,直至近几年来受到广泛关注的日本本田公司的 ASIMO,双足步行机器人的研究已取得了长足的进步[1-2]。双足小型行走机器人的研究现已成为了研究的热点,目前的小型行走机器人主要应用于娱乐,对它研究的价值却不仅体现它的娱乐功能,随着对双足机器人的研究,所得到的研究成果也在自动化、军事、汽车等产业得到了广泛的应用。因此,对双足机器人的研究具有较强的理论和实用价值。
1 设计实现目标本设计暂时只对机器人的双足行走功能和各关节的协调运动进行研究,对其它的视觉、触觉等人类器官的高级功能暂时不予仿生研究。本次设计主要完成的设计目标是:(1)模拟人的行走过程,包括直线行走或转弯行走,实现髋关节的 3 自由度运动和肘关节的 2 自由度运动;(2)行走过程平稳,动作连续;(3)小型化,实际的高度在 450mm 左右,重量在 2kg 左右;(4)采用半闭环控制及通用的零件,是机器人的制作成本最低化[3]。 2 机器人的自由度分配人类的身体有许多的肌肉和骨骼组成,要实现对人类器官运动的精确仿生却是很难实现的[4]。通过研究我们知道,通过下肢双腿 12 个自由度的模拟就能很好地实现人的双腿的行走功能,而上肢在行走的过程当中也扮演了重要的角色,它可以在行走的过程当中通过一定的运动平衡机器人的惯性力矩。下肢中,踝关节设计 2 个自由度,膝关节设计 1 个自由度,跨关节设计 3 个自由度。上肢设计 9 个自由度,头部 1 个自由度,肩部 2 个自由度,肘部 2 个自由度,手在行走过程中的自由度可以忽略,不影响行走运动的状态,故没有对手部的关节进行仿生。自由度的设计方案如图 1。根据自由度的设计完成的机械部分如图 2。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






