

基于CP-132UL V2的标定测试软件实现完成对IMU的标定工作
测量仪表
描述
1 引言
针对IMU的野外测试环境限制,需改进其测试方法,则需用新的硬件采集威廉希尔官方网站 实现。根据实际需要,在CP-132ULV2数据采集板的基础上,采用VC6.0设计了针对野外测试环境所需的测试软件,从而实现在恶劣环境下完成对IMU的标定工作。
2 CP-132UL V2简介
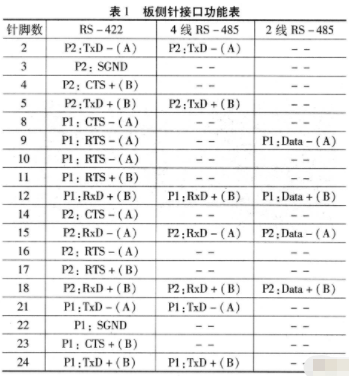
CP一132UL V2是Moxa公司生产的工业级多串口采集板,可信赖的信息传输最远可达4 000英尺,最大波特率为92 160 b/s,使其传输RS一422/485的信息传输像RS一232一样简单。基于CP一132UL V2的自动数据传输控制的特点可为数据通道的开启和关闭提供精确的时间控制,即使在高速数据传输下,也不会产生故障。将该器件置于威廉希尔官方网站 板中的终端电阻器,为电阻器提供合适的阻值。绝缘保护方案可使威廉希尔官方网站 板能够承受2 000 V的高压。下面给出CP-132UL V2的接口针分配图,其中图1是威廉希尔官方网站 板和计算机的接口,25针结构,可以直接插入工控机的主板插槽,表1为其各针接口功能;图2是与设备连接的接口,9针结构,连接需要测量的信号发生器,表2为其各针接口功能。

3 标定测试方法
IMU的核心部件是陀螺和加速度计,由于陀螺和加速度计自身的标度因数和安装误差因素的影响,使得IMU输出存在较大误差,所以需要标定IMU实现输出补偿。

采用分立标定方法标定惯组的误差参数,所谓分立标定方法就是直接利用加速度计和陀螺的输出作为观测量,与已知基准信息相比较从而确定误差参数。标定测试主要包括:①加速度计误差参数的标定;②陀螺标度因数以及安装误差系数的标定;③陀螺常值漂移的标定;④标定结果评估。
4 标定软件设计
基于CP-132UL V2的标定测试软件主要包括RS-422串行通讯,静漂测试和标定测试等功能模块。
4.1 RS-422串行通讯
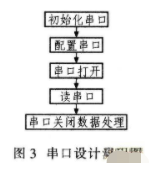
地面测试设备通过RS-422串行总线与惯组通讯,主要完成惯组数据接收和惯组误差补偿参数写入,其波特率为921.6 Kb/s。而数据包括帧计数、3路陀螺数据及温度3路加表数据及温度,以及温度控制板温度。惯组的数据每隔10 ms发送一组数据。利用API函数实现对RS一422串口通信的访问,在实现控制通信中,主要调用3个函数实现串口控制:首先配置串口,串口打开,然后通过对串口操作,接收数据后,关闭串口。程序设计流程如图3所示。设计时,串口设计是针对CP-132UL V2采集板,由于采集板内部可自动分配地址,所以不需要对硬件做任何操作,只需在软件上编写串口功能即可实现串口通讯。
4.2 静漂测试
静漂测试主要是对惯组进行一次通电稳定性测试。测试数据采样周期T、测试数据组数N可预先设定,最后计算静漂测试数据平均值和随机误差,评估惯组稳定性。
设计时,需要注意的是采样周期和测试组数可任意设定,所以要将采样周期和测试组数设为全局变量,计算平均值和随机误差时,只需将前面采集的数值进行简单算法。
4.3 标定测试
4.3.1 加速度计标定
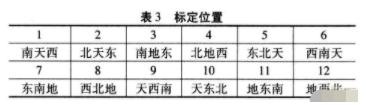
加速度计误差参数的标定采用在重力场静态条件下多位置标定方法。惯组加温稳定以后,按照表3所示的12个位置顺序进行标定。
在测试过程中,如果某个位置数据不够理想,可重新测定,也可在完成所有位置测试后,重新测定某个或几个位置。所以在程序设计中,需要增加允许纠错补错功能,为每个位置设定其标志符,并且确定每个位置数据存入的数组位置,这样重新测定某个位置后,新数据覆盖旧数据,从而实现纠错补错功能。由于前面每个位置的数据都固定位置,所以处理数据时只需到已确定的位置读取数据即可。
4.3.2 陀螺标度因数与安装误差系数的标定
采用速率标定方法来标定陀螺标度因数和安装误差系数。按X、Y、Z轴标定,允许纠错或补错。在单轴转台,利用转台的正反转相互抵消地球角速度的影响。为了减小转台不水平的影响,采用提高转速的方法,以高于30°/s的转速来实现,由于地球自转角速率相对于转台转速来说很小.因此将转台近似视为绕惯性空间转动。为了避免动态效应.转台的旋转启动和停止均不包括在测试时间之内。为提高试验精度,采用整圈标定法,其转动时间为120 s,转数为10圈。
4.3.3 陀螺零位的标定
取天北西,天南东,地南西,地北东4个位置,每个位置静态测试时间约20 min。设置4个标志位分别对应4个位置,然后将4个位置的数据分别存入内存数组中。将存入内存数组中的4个位置的数据分别带入(1)式得到陀螺零位。陀螺零位为4个位置陀螺输出的算术平均值(Dx0)。
4.3.4 程序设计流程
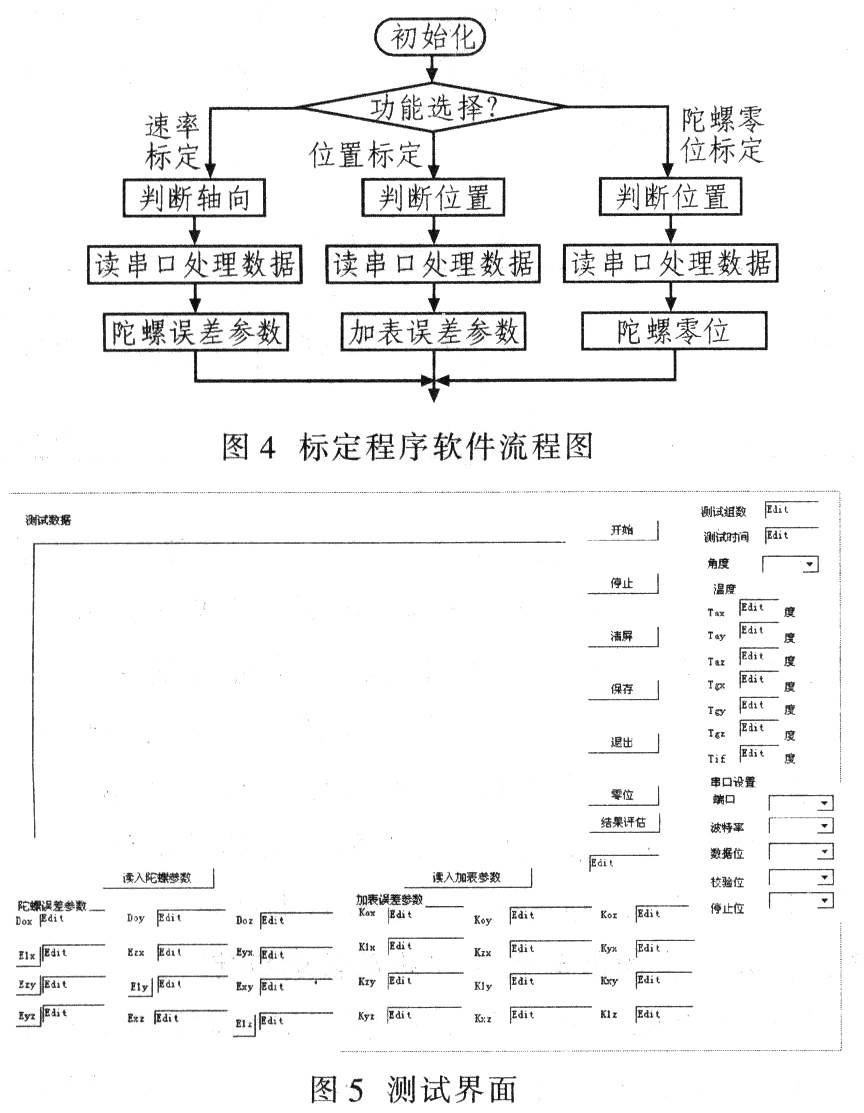
标定测试共分为3步:①位置标定,完成对加速度计的标定;②速率标定,标定陀螺的安装误差和标度因数;(9陀螺常值标定。图4为总程序设计流程。按照图4的流程,设计图5所示的测试软件。设计中首先判断功能.选择所需的功能,只需设置3个标志符,每个标志符对应相应的功能。具体测试功能中,建立3个类,各个类编写各自的测试功能。位置标定时,由于位置比较多,对每一个位置都应设置各自的标志符,采集到的数据存储在内存中固定位置。这样处理数据时只需读取相应位置,避免误操作,缩短操作时间。在速率标定时,设置3个全局变量分别表示3个轴,同时在补测时,可直接将旧数据覆盖新数据。陀螺零位测试时,由于测试时间较长,在测试初始化中需占用的数组存储空间较大,数据处理部分和位置标定差不多。图5是测试界面。
5 结果评估
将IMU组合置于平板上,利用所测得的陀螺和加表的各项误差系数,根据陀螺和加表的误差方程,求得此时陀螺和加表在标得的误差系数下的输入,即陀螺各轴敏感的地球自转角速度和加表各轴敏感的重力加速度,然后与理想的地球自转角速度及重力加速度相比较,评估标定结果。如果相差在陀螺和加表的精度允许范围内,说明标定结果比较满意。
6 结语
CP一132UL V2一端接IMU组合,另一端直接插入工控机,采用VC6.0编写满足测试方案的测试软件。经工程测试证明,测试软件与CP一132UL V2兼容性好,在高波特率下工作稳定,顺利完成IMU的地面测试。
责任编辑:gt
-
如何使用labview实现手眼标定2019-04-22 0
-
IMU误差来源/表达式/标定2020-12-24 0
-
基于模型的电机标定方法2021-08-27 0
-
如何使用imu_utils工具生成IMU的Allan方差标定曲线?2021-11-22 0
-
汽车ECU标定系统CCP 软件的实现2009-05-16 925
-
基于双口RAM的标定系统的实现2009-12-18 653
-
基于柔性测试技术的位置传感器标定与检测系统平台的设计2009-12-12 914
-
结构光视觉的优点和标定方法分析2020-08-31 5105
-
基于模型的标定软件xCAL介绍2022-06-17 3308
-
张氏标定法的原理和实现2022-11-14 3348
-
IMU测量原理与标定算法的实现2023-06-02 5248
-
什么是电机标定?电机标定的工作原理2023-08-04 5358
-
什么是相机标定 常用相机标定的方法2023-08-04 3072
-
IMU/GNSS与车体外参标定2023-11-20 1594
全部0条评论

快来发表一下你的评论吧 !
