在本文中,我们使用ADI的IMU ADIS16470和地磁传感器来开发平台和算法,实现捷联惯性导航系统。但是,地磁传感器只能提供姿态信息。对于航位推算或距离测量,我们只能使用IMU中的 加速度传感器。
2020-04-18 10:58:47 2924
2924 
假设已经实现了电机控制,后续的电机标定大抵上分成两类,一类是效率标定,一类是外特性标定。前者目标是以提升在各工况下的系统效率。假设你了解交直轴变换,那么效率标定的目标,就是通过调整交直轴电流,在不同的转速条件下,以更高的效率来实现扭矩。这个过程就是不断调整你的交直轴电流(对于异步机还得调整转差率);
2023-08-04 10:26:182240 
贸泽电子 即日起备货Bosch的BMI270 智能惯性测量单元 (IMU)。
2019-08-28 15:36:561691 上一期中挑选了国外三家知名的IMU厂商的主流IMU产品进行盘点分析。可以看到,国外主流的IMU厂商都在精度和低耗上下足了功夫,同时都在发力向高端IMU市场进军推出解决方案。这一期我们将视线转回国内,来看看国内MEMS厂商旗下产品。
2021-09-04 08:00:004812 单元IMU和垂直测量单元VRU产品特点:惯性测量单元垂直陀螺陀螺仪零偏稳定性8°/hr加速度计零偏稳定性0.04mg垂直陀螺仪算法,姿态精度±0.25°集成高精度压力计相比于3DM-GX3-25航姿参考系统,3DM-GX3-15缺少了一个三轴磁力计。姿态角当中的横滚和倾斜精度±0.25,航向没有参考。
2020-12-07 09:05:45
提供准确的姿态测量和姿态控制。协同RTK、PPK等精确定位设备实现AGV等人工智能设备的精确定位。也可以同LIDAR、雷达等设备通过人工智能算法融合,实现多功能准确导航。工业级惯导3DM-GX5系列
2020-12-16 14:18:35
\omegakω,c ω c_\omegacω分别表示加速度计与陀螺仪的温漂系数。三、IMU标定在SLAM领域中,单纯的视觉传感器在现阶段无法通过计算机视觉完成精确的位姿计算,一般采用imu作为补充,进行多
2020-12-24 15:56:31
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
Labview-多项式标定算法
2015-08-19 12:23:39
labview进行物体测量如何使用标定块进行标定?
2019-08-04 12:18:01
的传感器。这些信息可以用于计算载体的位置、速度和方向,从而实现惯性导航、姿态控制、动态监测等功能。IMU通常由三个方向的加速度计和三个方向的陀螺仪组成,可以测量载体在三个方向上的加速度和角速度。
而在机器人
2023-12-13 15:48:08
双目视觉的原理:由于视差原理,左右两个ccd的位置固定,若能测量空间中同一个点P在左右两个ccd中图像的位置,则根据三角原理,可以求得P点在空间中的坐标位置。可用于摄像头实现空间点的距离测量。下图
2021-09-27 16:52:18
本帖翻译自IMU(加速度计和陀螺仪设备)在嵌入式应用中使用的指南。这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重算法、思想的讨论介绍本指南旨在向兴趣者介绍惯性MEMS(微机电系统)传感器,特别是加速度计和陀螺仪以及其他整合IMU(惯性测量
2021-08-09 06:46:21
处理器读取陀螺仪加速度计数据后首先需要对数据进行滤波处理,此文分析比较几种常用的滤波算法。IMU: IMU使用MPU9250(即MPU6500),设置加速度量程±8G,陀螺仪±2000dps,数字低
2019-06-11 08:00:00
***协议是什么?基于***协议的汽车ECU标定系统该如何去实现?
2021-05-12 06:33:24
、标定精度也不够理想。基于模型的电机标定方法,鲁棒性强,测试点少,提高测试效率,将MTPA和弱磁放在一张表格中标定,可同时实现基速以下以及高速弱磁区效率最优控制,采用GUI,易操作,弱化电机背景知识。通...
2021-08-27 06:01:41
如何使用imu_utils工具生成IMU的Allan方差标定曲线?
2021-11-22 07:23:12
求指教如何使用labview实现手眼标定谢谢
2019-04-22 18:24:28
基于***协议的汽车ECU标定系统DAQ模式的实现
2021-05-12 06:20:57
我们在我们的芯片组/PCB 中使用 ST IMU LSM6DSL。我们正在寻找现成的软件或算法来实施到我们的固件中,以确定来自 IMU 数据的速度/加速度和距离。有没有可以分享的示例代码?
2023-01-06 06:14:50
无锡瑞吉星电子的RJX-IMU-164系列;
参数如下:
一 、概述
RJX-IMU-16460高精度惯性测量单元是一款小型高精度MEMS惯性测量单元,可与ADIS-16460实现原位插拔替换、内部
2024-01-18 13:46:16
机器视觉系统环境下所采集到的图像,配合专业的标定算法来实现这一过程,系统可以精确得出视野范围内的任意位置上的误差数值,并据此误差数据评估机器视觉系统的精度等级;2、误差图像的校正与补偿,标定系统根据
2022-02-25 09:55:55
接下来我们具体的看看温度变送器的标定方法吧。 由于自然环境下温度始终是一个缓变的物理量,所以一般情况下对温度传感器的检定是属于静态的,这也能满足绝大部分温度传感器的实际需要。动态的检定极少,能实现
2016-01-11 16:39:59
最近在一直研究四轴的一些东西,不过听到学长说四轴用IMU算法比较好,所以我想问一下IMU 和AHRS算法用stm32如何实现呢?他们的区别是什么?哪个更好一些呢???求各位i解答!!
2019-04-19 06:36:22
大家好,向请教一个关于labview标定的问题。如图所示,使用labview标定测试距离,实际距离应该为96mm但是标定后用vision assistant测量的距离是95.41mm测量误差都接近
2018-11-10 11:21:32
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现手眼标定?
2020-05-28 14:42:35
在IMU传感器上进行艾伦方差所需的通常测量时间/数据点是多少?
2022-12-07 07:57:19
数字图像处理原理是什么?简单Ferret算法原理是什么?改进的Ferret算法原理有哪些步骤?改进的Ferret算法和目前常用的测量算法有哪些不同?
2021-04-15 06:58:37
运动状态的路径设计对待标定的误差项进行有效激励。仿真卡尔曼滤波结果表明,该算法使得待标定的各误差项根据车行轨迹在较短的时间内逐步收敛,实现在一般跑车实验中不拆卸惯性器件而达到标定的目的。这种在线标定
2010-04-24 09:31:29
在压力传感器自动标定系统中,自动采样算法是系统的重要组成部分,通过建立自动采样算法是数学模型,提高了采样的精度。通过软件编程应用于压力传感器自动标定系统中。
2009-06-25 09:06:06 22
22 简要论述了为延长惯性测量组合的稳定期以及提高惯性测量组合的使用精度,在位置转台上对惯性测量组合影响精度大的不稳定参数进行自标定的技术,即利用角速度计去标定低精
2009-07-16 09:44:5817 使用MATLAB实现了一种简便的摄象机参数的标定方法。先由四个标定点的坐标计算出透视投影矩阵,从而计算出标定模板上其它节点的图象坐标,之后进行内部参数和外部参数的计算
2009-09-03 12:07:5825 无线传感器网络是一个多学科交叉的新兴前沿技术研究领域。它在环境检测、遥感、目标定位等领域具有广泛的应用。本文对目前几种主要的目标定位算法进行了分析,并对基于
2009-12-16 14:31:4818 本文设计了一种基于双口ram的通用标定系统。提出标定装置与电控单元分离的标定系统硬件体系结构,将标定装置作为标定软件和电子控制单元的中间层,解决了标定系统与电控
2009-12-18 15:57:4018 从工程实用和维护的角度出发,提出一种针对于车载组合导航系统的在线标定算法。该算法使用卡尔曼滤波作为估计工具,通过趋于一般运动状态的路径设计对待标定的误差项
2010-02-11 12:11:5411 为了实现复杂的运动与导航控制,需获取控制对象的空间姿态信息,设计了基于四自由度(4DoF)IMU惯性测量传感器和C8051F330单片机的姿态测量系统。介绍了ADIS16300惯性测量传感器的
2010-07-21 15:25:1123 泛华测控推出ECU测量与标定软件----CALAB
近期,由北京中科泛华测控技术有限公司(简称:泛华测控)设计并开发的ECU测量与标定软件—CALAB(全称:Calibration Laborat
2009-11-24 13:30:54571 针对自标定加速度计组合动基座试验数据中存在的数据异常问题,推导并运用自适应Kalman滤波算法剔除异常数据,通过对不同Kalman滤波算法自标定精度解算结果的均值和标准差进行比较
2011-04-12 17:08:510 针对传统的IMU信号采集系统尺寸大、成本高和集成度低等不足,介绍了以DSP为核心的集成式IMU信号采集系统的解决方案,详细阐述了系统硬件实现方案和软件实时误差校正算法。该系统具
2011-05-18 16:55:4236 以简化以往的摄像机标定技术为研究目的,分析了标定算法对于前期图像处理的要求,给出了基于MATLAB 的简易 摄像机 标定方法。该方法借助于常用软件完成了以往摄像机的标定算法中的
2011-06-13 15:52:4039 采用直线对应法和基于最小二乘的标定方法对摄像机和光刀进行标定,设计并实现了三维扫描仪系统的标定,经试验表明,此方法简单易行,计算结果精度高,对数据测量的精确性和可
2011-10-10 10:38:4818 提出了基于平面单应性矩阵的摄像机标定算法,通过摄像机标定对检测区域进行网格划分,从而进行车辆速度的检测。经实验测试,该方法易于实现,且具有较高的检测精度,平均测速准确率
2011-11-10 14:35:3651 MEMS惯性测量单元自动校准算法研究与实现
2015-11-25 10:22:4919 对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56:253578 
三维脚型测量中的标定及轮廓图像处理技术_刘琼
2017-03-14 08:00:000 FIS1100IMU集成了专有的AttitudeEngine运动处理器和九轴传感器融合算法,将处理功率降低至原来的十分之一,是具有完整制定定位精度的消费电子IMU。Xsens提供传感器融合和系统级的整体解决方案。20亿件目标市场,跨越多个细分应用市场。广泛应用于支持运动、采用电池供电的应用中。
2017-09-12 17:20:1018 在三维视觉测量系统中,对仪器参数的标定是首先需要解决的难题,而对投影仪的内外参数标定是三维结构光测量系统中不可或缺的一部分。就目前而言,投影仪的参数标定还存在着标定精度偏低、方法单一、可操作性差等
2017-11-06 15:30:2120 量热仪在测量煤炭发热量时,热容量的标定工作是不容忽视的,其可以帮助我们检验量热仪的测量是否精确,便于提高实验结果的准确性。
2017-11-29 15:41:592795 针对张正友标定方法中相机内参数的求解可能陷入局部最优解的问题,考虑镜头的三阶径向畸变和二阶离心畸变,提出一种基于改进遗传算法的单目相机内参数优化标定方案。该方法可显著提高相机标定中内参数的精度,并能避免陷入局部最优。最后,实验验证了所提方案的有效性和可行性。
2018-01-05 16:11:491 图像测量技术在工业现场的应用日益广泛,已成为产品几何尺寸测量的重要方法,但光学镜头的径向畸变对测量结构有着很大的影响,本文着重介绍利用LABVIEW开发平台下的vision组件对测量图像进行标定
2018-02-23 10:00:4176 针对地面匀速运动目标定位问题,在校正源存在条件下提出基于双星时频差序列观测量的定位算法。首先在卫星星历存在误差条件下,推导基于双星时频差序列观测量的差分校正定位公式及其理论性能,数学分析表明尽管
2018-03-07 16:04:520 传统的双雷达地面目标定位算法因测量数据本身固有的误差和量测噪声,使得基于非线性估计定位算法的定位精度不高。本文研究了一种新的双雷达地面目标定位算法,该算法将已知雷达探测数据以几何方式加以表示,通过
2018-03-13 14:09:443 我们所说的惯性测量单元(IMU)包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度
2018-04-27 16:33:471885 今天为大家介绍一项国家发明授权专利——压力分布传感器标定测量装置。该专利由安徽埃力智能科技有限公司申请,并于2017年1月25日获得授权公告。
2018-09-29 09:37:003581 的确定性标定方法会导致大量局部最优值的出现。在此基础上,本文提出了基于交叉熵算法的跟驰模型标定的框架,基于蒙地卡罗与重要样本策略逐步逼近参数的最优概率密度函数。实例分别采用合成数据与实测数据标定智能驾驶模型
2019-01-11 16:23:408 惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。
2019-10-04 17:12:0010522 进行标定 ,能够很好的克服传统标定方法在现场应用的局限性 ,同时能将标定结果保存为独立文件 ,方便调用。通过对实际物体的测量 ,验证了方法的可行性 ,能够很好的提高测量精度。
2020-03-17 08:00:0027 详细解说IMU惯性测量单元 IMU可获得载体的姿态、速度和位移等信息,被广泛用于汽车、机器人领域,也被用于需要用姿态进行精密位移推算的场合,如潜艇、飞机等惯性导航设备中。 基于MEMS技术的IMU
2020-06-11 11:00:131752 详细解说IMU惯性测量单元 IMU可获得载体的姿态、速度和位移等信息,被广泛用于汽车、机器人领域,也被用于需要用姿态进行精密位移推算的场合,如潜艇、飞机等惯性导航设备中。 基于MEMS技术的IMU
2020-06-01 11:22:016930 IMU和AHRS之间的区别 AHRS航姿参考系统 航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态
2020-04-20 11:02:132029 IMU惯性测量单元是什么? 惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度
2020-04-20 10:32:576231 IMU惯性测量单元是什么? IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。 IMU的基组成 利用
2020-04-18 00:35:09740 IMU惯性测量单元的基本原理 IMU是测量物体三轴姿态角(或角速率)以及加速度的装置。 其中一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号
2020-04-26 15:26:353559 IMU惯性测量单元介绍 惯性测量单元的工作原理是:使用一个或多个加速度感应器,探测当前的加速度速率;使用一个或多个偏航陀螺仪,检测在方向、翻滚角度和倾斜姿态上的变化。有一些惯性测量单元还同时包括
2020-06-08 14:29:334054 IMU与AHRS系统的具体区别 无人机的姿态解算一般有两种算法,一种是IMU,另一种是被各种无人机广泛使用的AHRS,他们之间有什么区别和联系呢? AHRS俗称航姿参考系统, AHRS由加速度计
2020-06-01 10:57:042407 IMU惯性测量单元详解 惯性测量单元的工作原理。惯性测量单元的工作原理是:使用一个或多个加速度感应器,探测当前的加速度速率;使用一个或多个偏航陀螺仪,检测在方向、翻滚角度和倾斜姿态上的变化。有一些
2020-06-01 10:37:199178 IMU的陀螺和加速度计的测量是没有任何误差的那么通过陀螺则可以精确的测量物体的姿态。通过加速度计可以二次积分得出位移,实现完整的6DOF,也就是说你带着一台这种理论型的IMU在宇宙任何位置运动。我们都可以知道他当前的姿态和相对
2020-06-15 10:39:453121 针对IMU的野外测试环境限制,需改进其测试方法,则需用新的硬件采集威廉希尔官方网站
实现。根据实际需要,在CP-132ULV2数据采集板的基础上,采用VC6.0设计了针对野外测试环境所需的测试软件,从而实现在恶劣环境下完成对IMU的标定工作。
2020-08-13 15:19:351025 
IMU指的是惯性测量单元。IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。
2020-11-20 15:24:1954523 张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2020-12-31 10:06:195420 
iSensor MEMS惯性测量单元(IMU)手册
2021-05-24 09:37:1121 针对传统标定方法参数考虑较少、标定精度不高的缺点,将群智能算法思想应用其中,并在现有的粒子群算法和灰狼算法基础上进行优化,取长补短,提出一种混合算法。首先,基于张正友方法获得标定的参数范围
2021-05-31 11:09:515 随着自动驾驶技术越来多地被人们所提及,相关的技术也在不断的发展,各类高精度定位、传感等技术得到了长足的发展,而其中有一个冉冉升起的新星,那就是IMU技术。这个技术的出现弥补了GPS定位的不足,两者
2021-07-09 09:18:203891 多旋翼飞行器设计与控制的传感器标定和测量
2021-09-14 09:26:310 九轴惯性测量单元IMU_MPU6050中文数据手册。
2022-03-07 16:31:472 在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:347612 文中提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
2022-08-22 10:07:232535 据麦姆斯咨询介绍,惯性测量单元(Inertial Measurement Unit,IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。通常,IMU内部集成3轴陀螺仪和3轴加速度计,以及运动/姿态算法。如果IMU内部集成的传感器采用MEMS技术实现,那么可被称为MEMS IMU。
2022-09-28 10:32:22786 IMU通常包含一个3轴加速度计和一个3轴的陀螺仪,是测量物体三轴姿态角(或角度率)以及加速度的装置。
2022-11-11 14:46:532789 张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2022-11-14 10:14:402381 电子发烧友网站提供《使用arduino/genuino 101的板载惯性测量单元(IMU)教程.zip》资料免费下载
2022-12-19 09:35:230 直接使用惯性测量单元 (IMU)
2022-12-28 09:51:22750 
相机畸变是影响相机标定精度的关键因素。由于畸变补偿不准确,传统的标定方法不能满足要求较高标定精度的测量系统的要求。本文提出了一种基于迭代畸变补偿算法的新型相机标定方法。相机的初始参数由全场相机像素
2023-01-05 10:18:32780 到,IMU-TK 这个开源工具是基于此论文为理论依据开发的。IMU-TK 这个工具用来标定确定性误差(系统误差),是一个基于C++的开源IMU数据处理库,用于处理惯性测量单元(IMU)数据,包括加速度计、陀螺仪和磁力计等传感器。该库提供了一组API,可以用于读取IMU数据、进行校准、等操作。
2023-05-24 17:28:59827 
越来越多的机器人系统配备了多个惯性测量单元(IMU)。由于竞争性目标,当用于控制时期望靠近重心,或者在与外部感知传感器集成时为了获得无阻碍的视野,单个IMU经常被安装在相当远的距离上。
2023-07-08 09:41:451103 
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2023-08-03 09:38:04830 
投影过程首先是算出归一化平面上点,然后再对归一化平面上点加rantan、equidistant畸变,最后再作用于内参焦距、主点,得到成像像素点坐标。
2023-08-08 11:41:04293 
众所周知,CCP是CANCalibrationProtocolCAN标定协议的缩写,XCP是UniversalMeasurementandCalibrationProtocol通用测量与标定协议
2023-09-23 08:23:18872 
的外参问题经常是IMU/GNSS与车体坐标的外参、Lidar和Camera的外参、Lidar和Lidar的外参、Lidar和IMU/GNSS的外参。 离线外参标定 1.1 IMU/GNSS与车体外参标定 这个
2023-11-20 15:34:23420 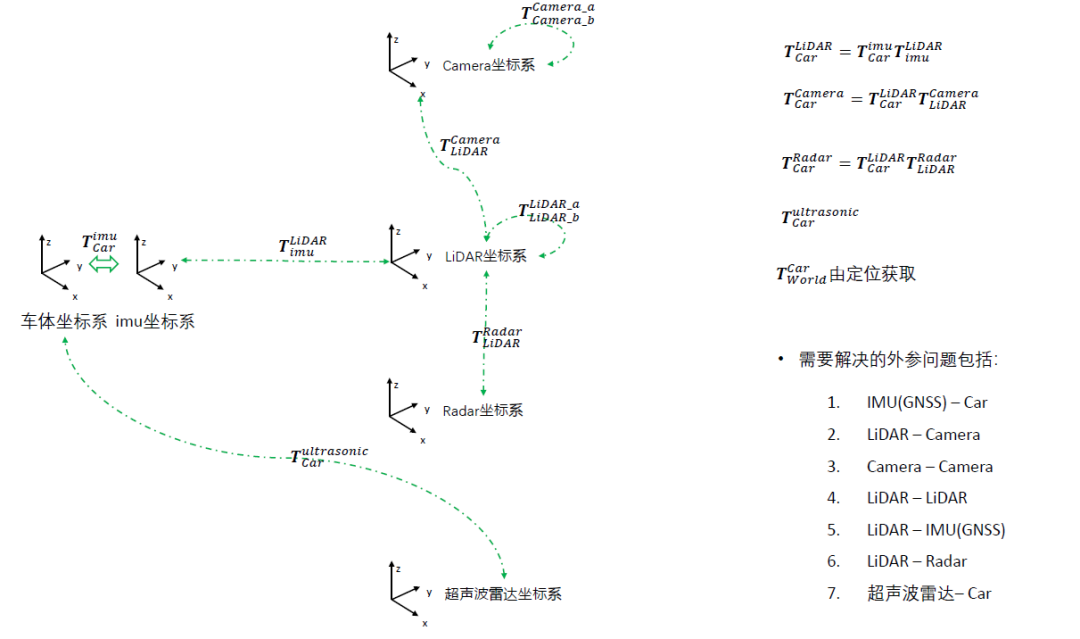
村田MEMS惯性测量单元(IMU)SCHA634产品分析
2023-11-27 16:27:32387 
M-G370PDS0是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并提供高稳定性和高精度的测量能力精密补偿技术。各种校准参数被存储在IMU的存储器中,并且是
2024-01-11 09:55:450 一般描述 M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用高精度补偿技术。各种校准参数被存储在IMU
2024-01-11 17:00:110 一般描述M-G552PJ1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用的高精度补偿技术。通过控制器局域网(CAN)接口
2024-01-12 10:56:270
 电子发烧友App
电子发烧友App



































 工商网监
工商网监
评论