

ORB_FPGA单层图像金字塔的ORB特征提取方案分析
电子说
描述
ORB特征是一种图像识别、追踪和匹配中常用的特征,大名鼎鼎的ORB-SLAM就是使用的这一特征。它提取FAST特征点,并通过特征点附近的窗口矩计算特征点的方向,含方向的FAST特征也被称为oFAST特征。对提取到的oFAST特征,进一步计算BRIEF描述子。ORB特征包含了两部分,一是特征点位置,二是它的BRIEF 256位描述子。
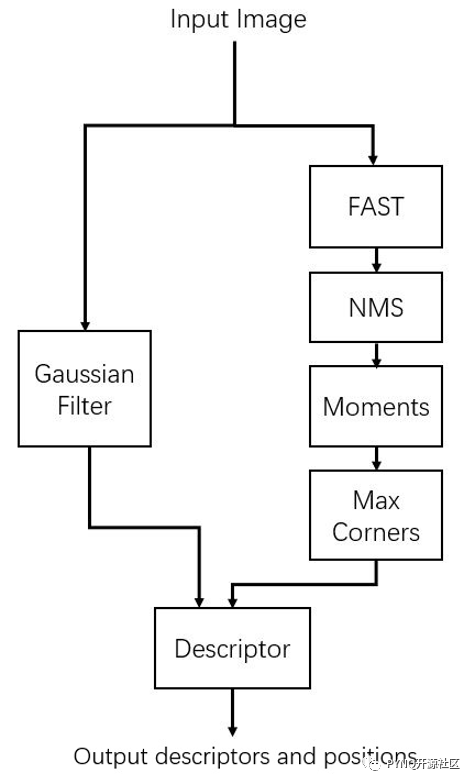
ORB特征计算的流程
本项目实现了ORB_FPGA单层图像金字塔的ORB特征提取,利用FPGA的并行计算能力,使这一过程比起纯CPU执行加速了5.6倍。
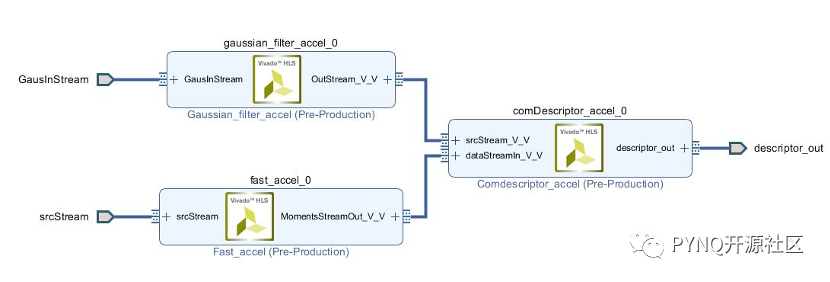
加速器结构,输入输出都是AXI-Stream接口
上图为图像加速部分的工程示意图。这里同样使用了HLS编写的加速IP采用AXI-Stream数据接口,数据接口与DMA首尾相连,只要控制DMA就可以驱动它。
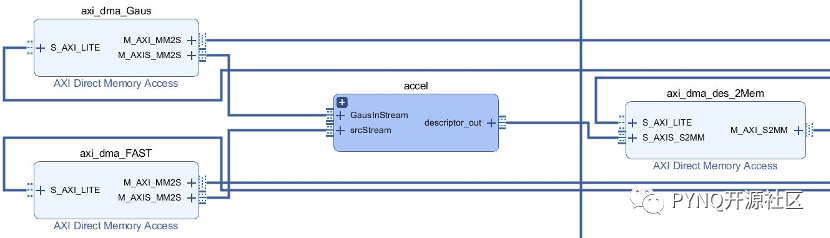
总体工程
本项目的例子输入是SD卡中保存好的图片,当然也可以自己从摄像头读取图片。
快速开始
运行下面这条命令即可快速安装:
sudo pip3 install git+https://github.com/Siudya/ORB_FPGA.git
项目演示
安装好以后打开ORB_FPGA/ORB_FPGA..ipynb
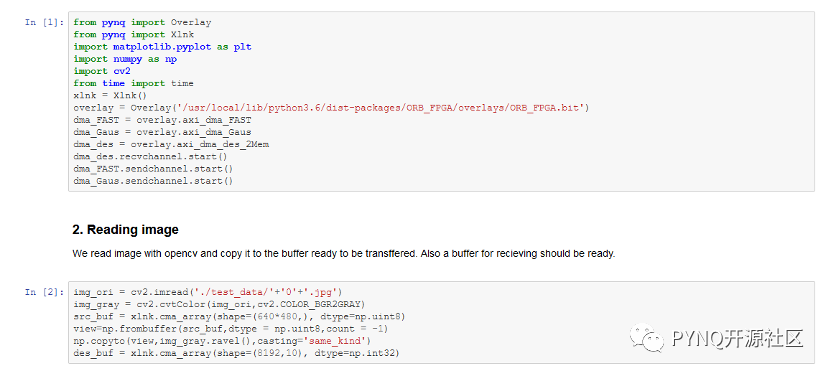
首先是初始化软硬件,并且读取图片。注意读取进来的图片要拷贝到xlnk分配的内存才可以使用DMA传输。
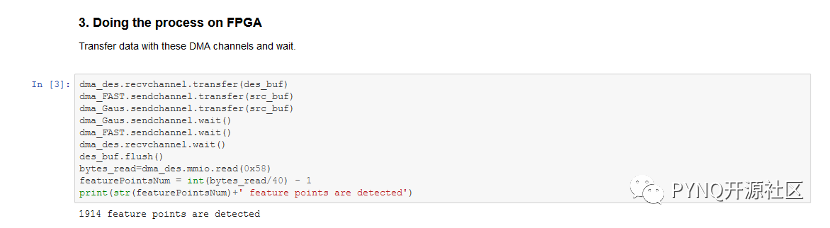
将图片从两个输入DMA写到加速器中再从输出DMA读回。统计收到的字节数可以得知1914个特征点被检测到了。
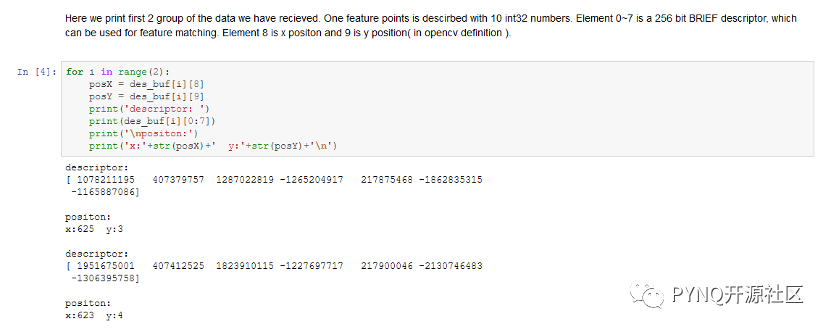
这里可以打印前两个特征点的内容。可以看到前8个32位数是描述子,后两个是坐标。
把特征点画在原来的图像上,可以看到检测出的特征点大部分是角点和边缘点。这实际上和FAST特征是一致的,但是FAST特征不包含描述子。
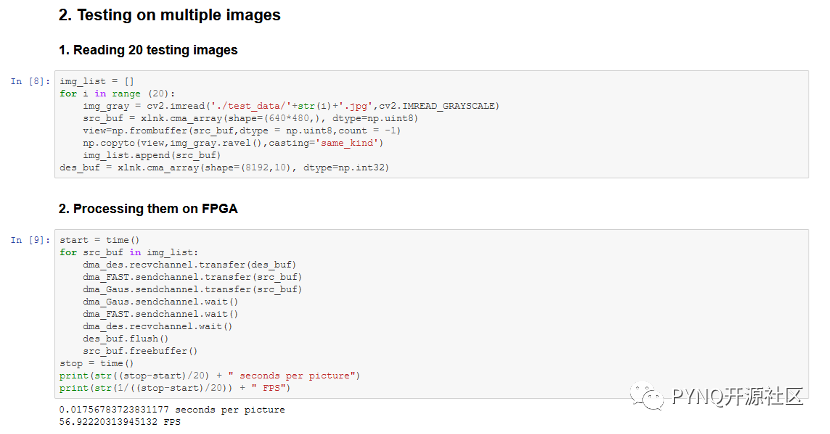
接下来读取更多图片来看看吞吐量如何。这里读取了20张图片,统统送入加速器加速,可以看到帧数可以达到56帧。
项目中也提供了纯软件测试的可执行程序,可以直接运行。

可以看到在O2优化的条件下,PS端运行相同算法仅仅只有10.2帧,使用硬件加速器加速达到了5.6倍之多。
编辑:hfy
-
手指静脉图像的特征提取和识别前期研究2012-05-11 0
-
PCB工程师金字塔分级标准2012-08-06 0
-
自制for循环打印金字塔2016-09-18 0
-
图像金字塔和resize综合示例_《OpenCV3编程入门》书本配套源代码2016-06-06 568
-
图像金字塔和resize综合示例_OpenCV3编程入门-源码例程全集2016-09-18 595
-
绘制金字塔程序实现2017-11-27 823
-
基于ORB和LATCH相结合的特征检测与描述算法2017-12-01 1155
-
可控特性的金字塔变换2017-12-14 897
-
改进ORB的特征点匹配算法2017-12-15 1542
-
基于梯度方向直方图与高斯金字塔的车牌模糊汉字识别方法2017-12-25 1338
-
一种金字塔注意力网络,用于处理图像语义分割问题2018-06-05 11861
-
中国集成威廉希尔官方网站 封装行业市场现状——金字塔的尖顶与基座2019-07-11 3333
-
如何实现多聚焦图像融合的拉普拉斯金字塔方法2021-02-03 776
-
基于规范化函数的深度金字塔模型算法2021-03-30 710
-
基于高斯金字塔图像的改进Harris特征点检测算法2021-05-06 798
全部0条评论

快来发表一下你的评论吧 !
