
资料下载


×
基于DSP的高压训线机器人数字化控制器
消耗积分:0 |
格式:rar |
大小:0.24 MB |
2021-05-07
分享资料个
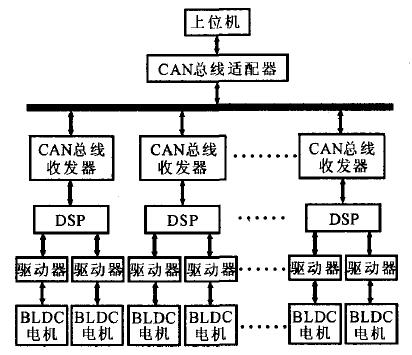
在分析和研究高压巡线机器人原控制器的基础上,设计了一种基于DSP的全数字化控制器。该控制器采用主从式多处理器工作模式,用6个DSP对机器人12个关节的无刷直流电机进行伺服控制,采用高速CAN总线实现上位机和下位机的通讯。与原控制器相比,该控制器具有较高的集成度和优良的性价比,便于降低成本减少机电系统体积。试验表明,该控制器性能稳定可靠,可满足机器人多轴控制的需要。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




