

一种基于FPGA的激光稳频一体化解决方案
电子说
描述
正文
基于Moku:Lab激光锁盒的PDH技术,一种基于FPGA的激光稳频一体化解决方案
在这篇应用文章中,讲述了一个我们上海昊量光电设备有限公司真实的世界故事,我们的一个客户如何用Moku:Lab替换了几个复杂的电子设备,并使用Pound-Drever-Hall (PDH)技术将Innolight Prometheus激光器的频率锁定在一个超稳腔内的Moku:Lab产品。
一. 介绍
Pound-Drever-Hall(PDH)技术是一种主动锁频技术,是目前激光稳频系统中性能最好的手段之一,由 R.V. Pound,Ronald Drever 和 John L在19831年首次提出的。利用Fabry-Perot(F-P)腔稳频的激光系统是最常见的一种稳频方法。当激光被射入一个F-P腔中时,它会被反射、透射或吸收,腔的长度越接近激光器的精确波长的一半,激光器的能量就会被传输的越远。不幸的是,激光的频率和腔长的连续变化取决于一系列的因素,如环境温度、注入电流和量子波动。PDH锁定利用从谐振腔反射出来的光来产生一个误差信号,来对谐振腔的长度或激光器的频率进行微调,从而完成腔长和激光频率的某种匹配,以达到最大限度地实现远距离传输。
根据框图简单说一下PDH技术,激光器输出频率为ω的激光,然后经过EOM晶体(electric-optical modulator)电光调制器,对激光光场进行射频电光相位调制,然后将调制后的激光信号经过偏振分束棱镜(PBS)与四分之一波片(λ/4)进入光学腔,然后与光学腔谐振,然后通过反射到达光电探测器,偏振分束棱镜(PBS)与四分之一波片(λ/4)的作用就是让腔反射光进入探测器。然后对反射光信号进行相位解调,得到反射光中的频率失谐信息,产生误差信号,然后通过低通滤波器和比例积分威廉希尔官方网站 处理后,反馈到激光器的压电陶瓷或者声光调制器等其他响应器件,进行频率补偿,最终实现将普通激光锁定在超稳光学腔上。关于PDH技术的理论细节可以在一些综述论文和学位论文中找到。为了实现PDH锁定,需要一些专用的和定制的电子仪器,包括信号发生器,混频器和低通滤波器。Moku:Lab的激光锁盒集成了大部分的PDH电子仪器,在提供高精度的激光稳频功能上是具有独一的,紧凑的,易于使用的仪器。
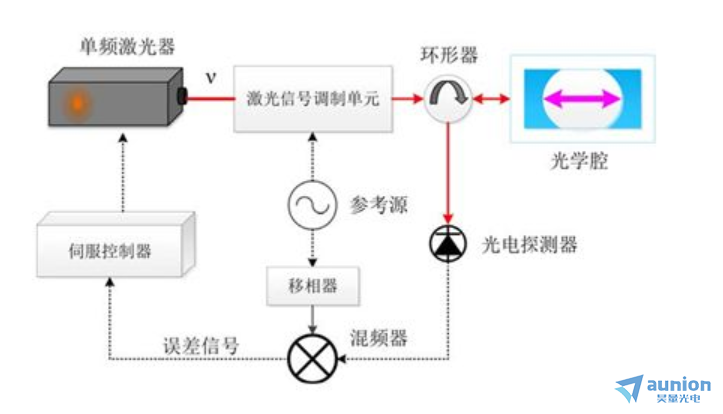
图1:PDH稳频系统原理图
二. 实验装置
Moku:Lab的激光锁盒集成了波形发生器、混频器、低通滤波器和用于PDH锁定的双级联PID控制器。通过调节激光腔的长度,可以监测反射光的振幅,并在屏幕上实时显示PDH信号。用户只需轻轻一敲就可以将激光锁定在任何过零点。
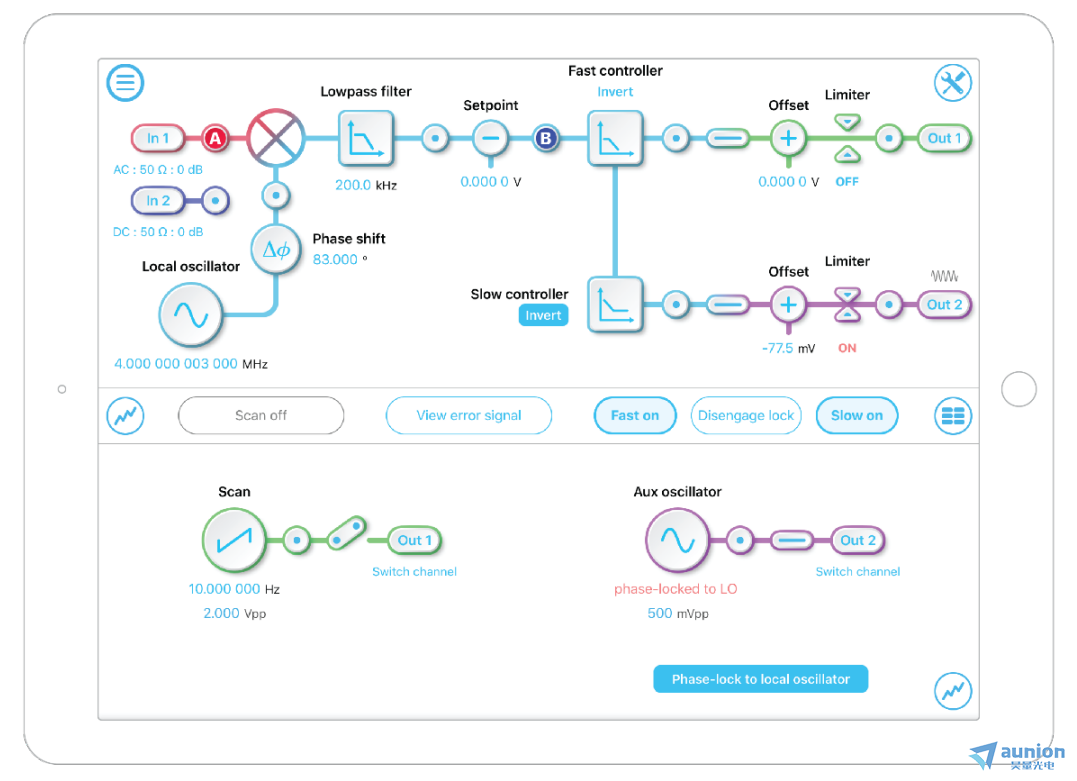
图2: 主用户界面Moku:Lab激光锁盒
在一个示例设置中,Prometheus激光器(Innolight, 20NE)的出射光由电光调制器(EOM, iXBlue, NIR-MPX-LN-0.1)调制,照射到由三镜环形腔(168 mm,即1.78 GHz的FSR),此腔体线宽为190 kHz。反射光被输入耦合器即时反射捕获。用两个光电二极管(PD, Thorlabs, PDA05CF2)来检测腔体的透射光和反射光。PD上检测到的信号被输入到Moku:Lab的输入1(混频器输入,交流耦合电阻50 Ω)和输入2(监视器,直流耦合电阻50 Ω)。利用Moku的激光锁盒波形发生器,在3.0 MHz的频率下产生了500 mVpp的本振(LO)信号。然后LO信号从Moku:Lab的输出2输出,通过偏置器 (miniccircuits, ZFBT-6G+)驱动EOM。用LO数字信号波形解调来自光学腔的反射响应信号,这里我们用到了数字混频器和角频300.0 kHz的四阶数字低通滤波器。通过扫描空腔共振的激光频率,调整相位延迟,直到误差信号峰-峰电压(斜率)最大,从而调整混频器处LO信号的相移。
快速PID控制器的积分器单位增益频率(0 dB点)为5.8 kHz,初始积分器饱和角为100 Hz。然后将快速PID的输出1直接连接到激光器的压电陶瓷上来驱动激光频率。在扫描模式下,该输出也会产生斜坡信号来发现空腔谐振。低频PID控制器的比例增益为-32.2 dB,积分器交叉频率为200 mHz。Moku:Lab的输出2出来后通过Bias-Tee分成了两路,一路到了EOM,一路到了激光的温度控制BNC接口端。在该激光温度致动器上放置了一个20dB的衰减(Minicircuits, HAT-20+),以降低其灵敏度。
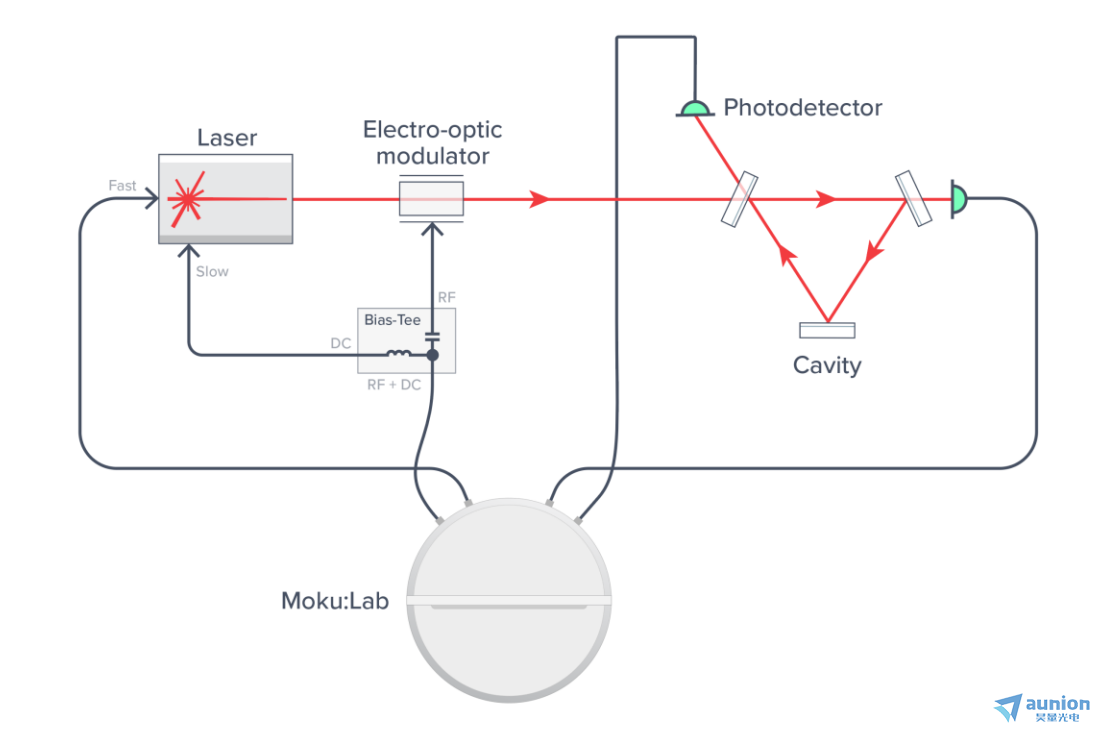
图3:利用Moku:Lab建立的PDH技术的实验装置
三. 利用Moku:Lab进行的PDH激光稳频
为了锁定PDH,PDH读出信号首先在激光锁定模式下由斜坡扫描产生。缓慢的温度偏移被调整,以使空腔共振接近扫描范围的中间。轻触一下界面中间的过零点选择为锁定点。这用到了快速PID控制器,并且把激光频率锁定在腔中。然后关闭积分器饱和,使激光频率达到腔体的直流频率。然后使用慢速控制器,这样排除了激光器的压电转换器(PZT)在低于0.1 Hz频率下的控制工作,并确保激光器在大环境范围变化(办公室/实验室)的条件下保持锁定。
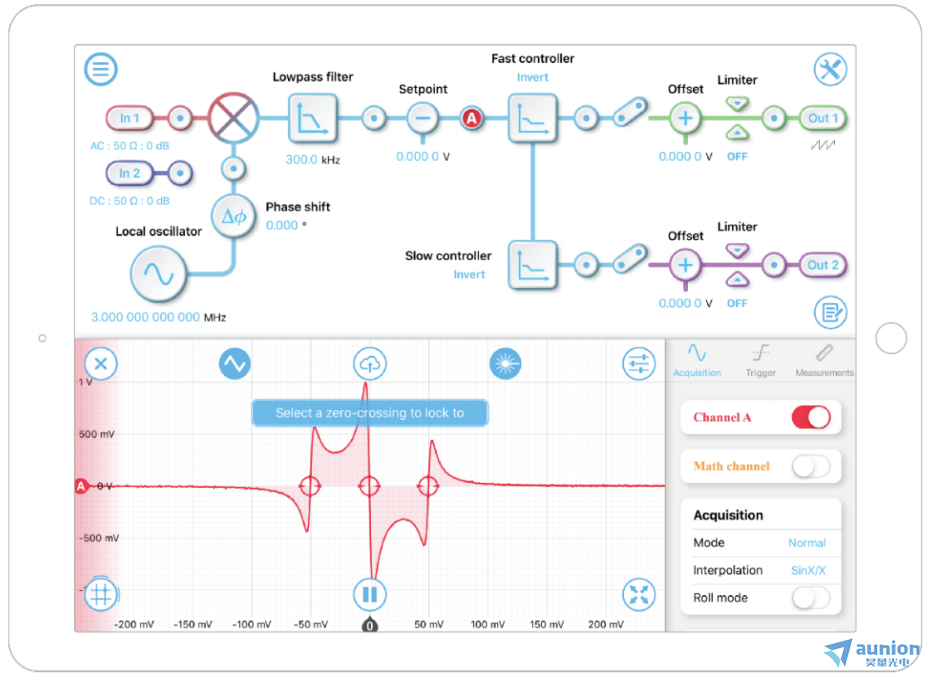
图4:PDH误差信号绘制和点击锁定过零点示意图
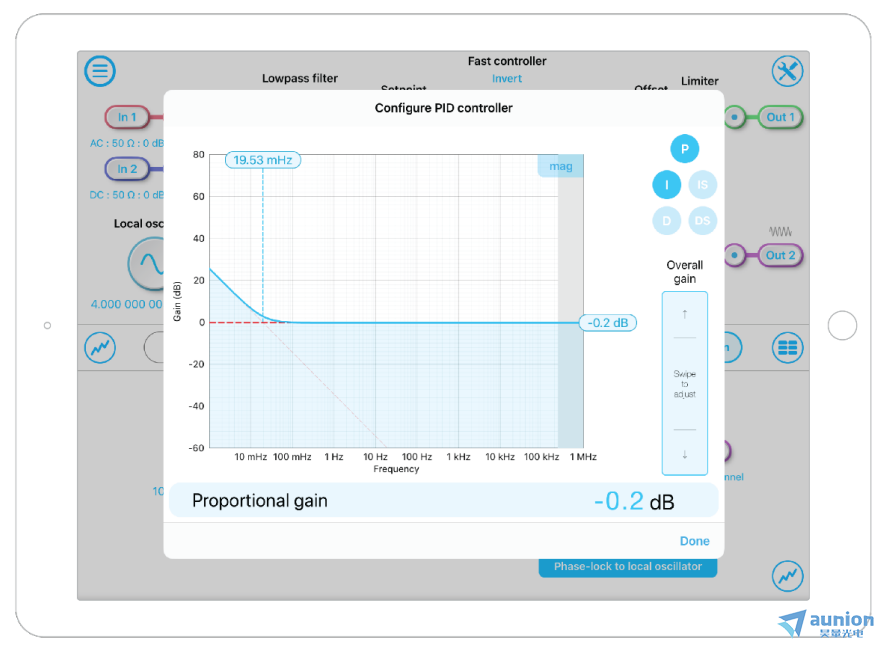
图5:PID控制器配置示意图
四. 结果和讨论
通过监控传输的光电探测器功率,并通过ccd相机(也可以使用红外敏感观察卡)查看传输过程中的激光模式形状,来验证激光对腔和TEM00模式的锁定。这些监测信号的时域信息很容易在Moku:Lab的激光锁盒功能内置的示波器中实时查看。利用内置的示波器测量特性来捕捉误差信号均方根RMS,对整个环路的增益进行了基本优化。增加增益使误差信号的均方根最小;太多的增益会引起振荡,太少的增益意味着激光频率扰动仍然没有得到充分的抑制。进一步的环路性能改进可以通过频域优化来实现,这可以通过在Moku:Lab输出1和激光压电之间注入扫频正弦扰动来实现,激光压电使用了求和前置放大器,并可以测量回路中注入扰动的抑制。这样的测量可以进行使用第二个Moku:Lab的功能:频率响应分析仪。在这些高度优化的配置中,环路的单位增益频率应该优化到30-60 kHz(高于这通常相对于激光的压电响应速度快很多)。
在一次测试中,使用单腔双激光测试验证了控制回路的性能。第二个激光器被锁定在腔内一个自由光谱范围(FSR)上,第一个激光器的锁与第二个具有相同的Moku:Lab激光锁盒设置。在两个独立频率的锁定下,比较了两种激光器在相同的普通腔的噪声,独立的电子噪声和Moku数字化噪声。这两种锁定激光器之间的剩余频率变化与腔间隔噪声、腔涂层的热噪声和来自实验室环境的常见振动无关,这种噪声仅由控制回路和传感器产生,测量方法是将来自两个激光路径的光结合到一个高速光电探测器中,与一个稳定的GHz函数发生器混频,并使用第三个Moku:Lab仪器,一个相位表,来跟踪频率偏差。Moku:Lab相位表通过产生相对频率噪声的ASD来读出剩余频率噪声。我们得到了在每个环路10 Hz的情况下,控制回路的残余噪声是0.1 Hz/ Hz。腔激光锁模的真实绝对性能最终受到基频热涂层噪声的限制。
审核编辑:符乾江
-
石油石化室内外一体化定位解决方案中海达 2023-06-21
-
分享一种不错的通用SDRAM控制器FPGA模块化解决方案2021-04-08 0
-
求一种A-D-0.5KVA-A200集中电源一体化解决方案2021-12-30 0
-
求一种TC-D-0.5KVA-36一体化解决方案2022-01-03 0
-
基于XML Web Services的管控一体化解决方案的研2009-05-25 829
-
光伏发电智能一体化解决方案在中宁电站成功应用2014-01-10 2407
-
EW一体化平台解决方案2016-12-25 834
-
易往智能制造一体化解决方案平台及系统交流-V1.02016-12-25 918
-
四维图新打造智能座舱一体化解决方案 提供高性能多场景支持2022-06-08 1923
-
基于Moku:Lab激光锁盒的PDH技术,一种基于FPGA的激光稳频一体化解决方案2022-04-20 1310
-
Moku:Pro/Lab/Go的激光稳频一体化解决方案2023-01-06 967
-
智能配电一体化解决方案2023-09-04 1008
-
供应 ETA9184:TWS的一体化解决方案2024-09-12 479
-
千方新能源停充一体化解决方案2024-11-09 370
-
英特尔发布全新企业AI一体化解决方案2024-12-02 501
全部0条评论

快来发表一下你的评论吧 !
