

一种超级实用的步进电机调速算法
工业控制
描述
今天想分享一种超级实用的步进电机调速算法,这种算法在步进电机调速方案中可以说是一种非常优异的方案。
梯形调速算法
为啥需要设计一个调速算法呢?步进电机不是给多少脉冲就动多少步吗?但是带上负载了就可能失步,所谓失步,简单理解就是实际电机轴转过的度数,没有输入脉冲对应度数多。为什么会这样呢?电机的扭矩有可能无法驱动负载。一般会做一个启动加速控制过程,停止的时候做一个减速控制,中间做一个匀速控制。这就是比较常见的梯形调速控制算法。
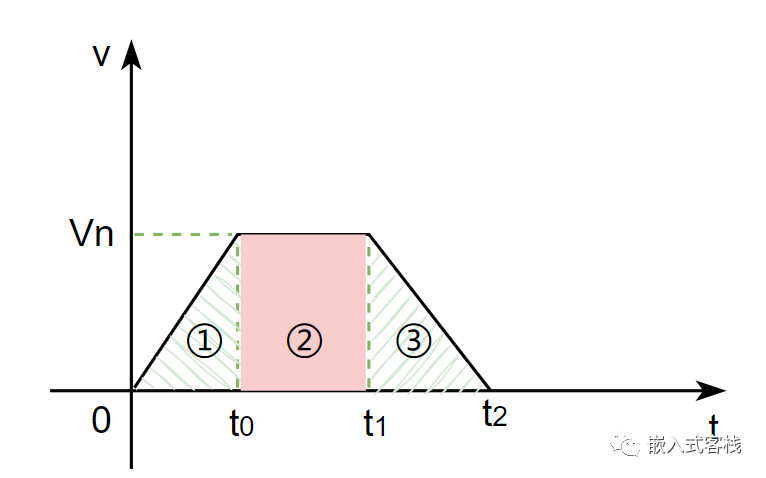
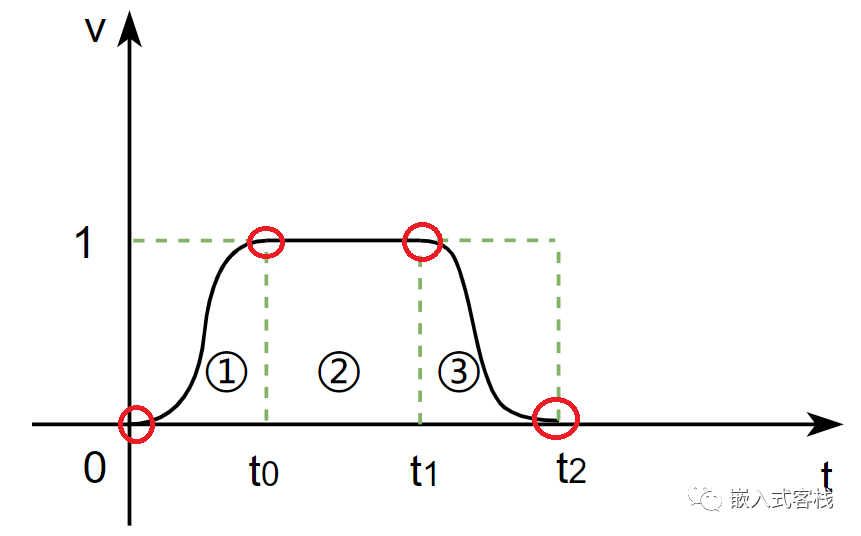
这样一个梯形调速算法,相当于步进电机的运动过程包含三个阶段:
①加速过程
②匀速过程
③减速过程
①加速过程所用到的加速度为:
一般加速过程与减速过程所用的加速度绝对值是相同的,减速过程相当于加速度为-a.
所以总的行程图中速度曲线下阴影部分三个过程的面积:
由于加速过程与减速过程所用到的加速度绝对值相等,所以,所以
梯形速度调速算法很简单,比较容易实现,但是这个算法却有缺陷。
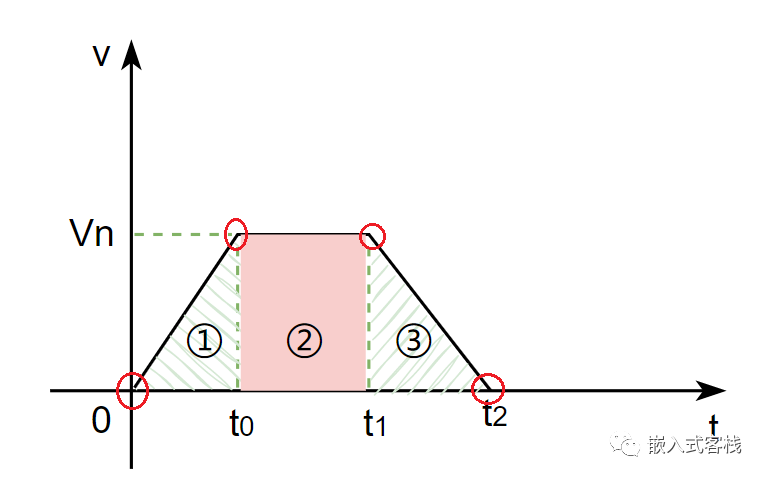
图中红色圆圈的位置,加速度从a突变为0,或从0突变为-a,这些突变点会带来什么后果呢?来看看其加速度曲线:
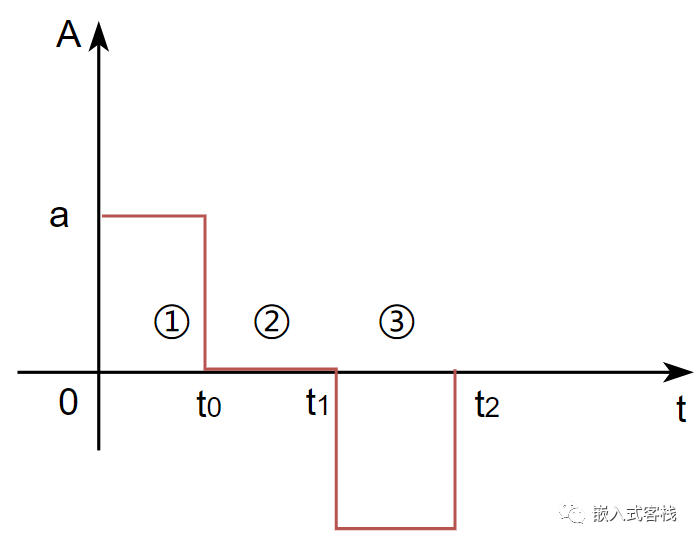
电机带着负载运动,比如常见的丝杆将电机的旋转运动,转化直线运动,又或者齿轮或滚珠结构,带动负载进行旋转运动。具有一定的质量的负载,在加速度突变情况下,很有可能会造成机械振动。
比较专业一点的术语称为急动(Jerk),其实就是考察加速度的变化率的,也可以称为加加速度,我们知道速度的变化率就是加速度,而加速度的变化率就是加加速度。
如果用数学语言来装下逼,就是速度函数对时间的一阶导数就是加速度,而对加速度曲线的一阶导数就是加加速度。因此上图中加速度在时刻突变,意味着加加速度为无穷大。
对于给定的负载,加加速度越大,产生的不需要的振动能量就越大,振动能量的频谱也就越宽。这意味着加速度变化越快,振动就越强大,激发的振动模式数量也就越多。由于振动能量被系统机械吸收,如果振动频率与机械和控制系统中的共振相匹配,则可能会导致稳定时间增加或精度降低。
这样一说,好像就有思路了,我们如果能做到加速度的变化率是连续的,是否这种变化就会变得平滑呢?运动是不是就更柔性?所谓变化率连续,是不是就是相对于加速度函数的导数曲线是连续的就可以了?
S-曲线调速算法
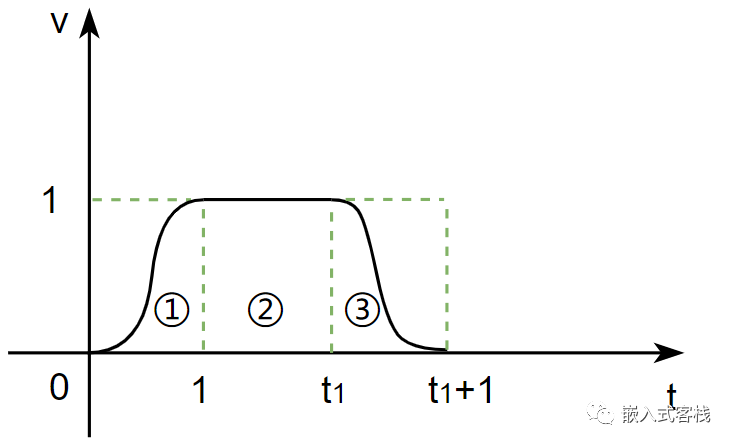
假定来归一化速度曲线为从0加速到1,假设能做出如下调速曲线:
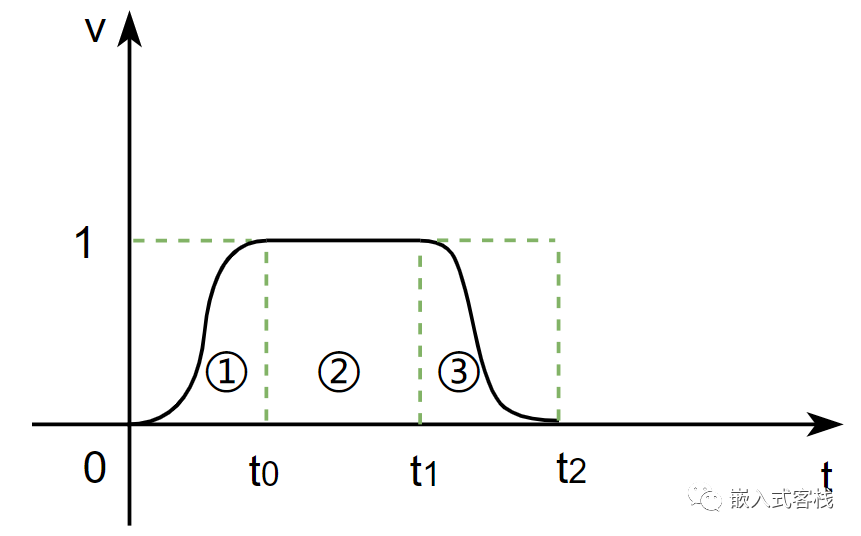
这样来看看这些拐点:
看速度曲线先是比较缓慢的增加,然后再比较快速的增加,然后在慢慢第逼近到期望的设定速度,因此这是一个变加速过程。再来做一个进一步的假设,把加速度过程的时间也做一个归一化:
对于函数,可以看出:
前面说,那么,意味着在0、1时刻,加速度为0。
假设速度曲线函数为:
则其一阶导数为:
这样就可以得出下面的方程组了:
解出a和b:
因此,调速曲线就得到了:
其加速度曲线为:
整个过程的加速度曲线长这样:
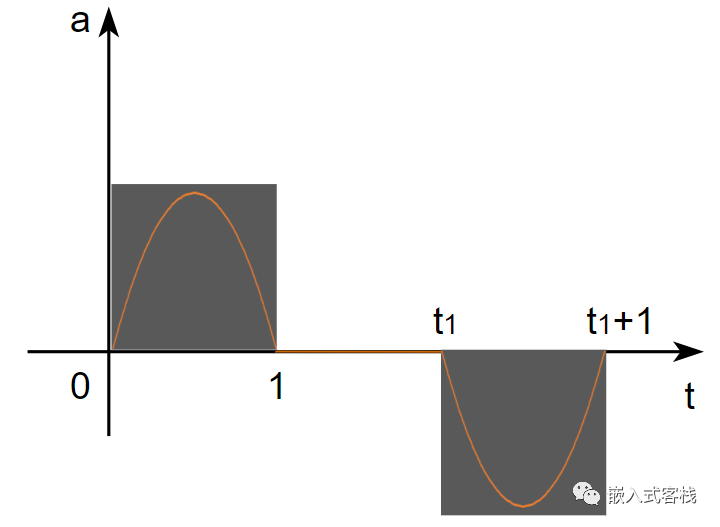
这样一来,加速度就是连续变化的,没有突变点。解决了之前提到的急动的问题。由于加速、减速过程完全对称,因此我们关心的运动距离控制,则很容易用下图中绿色区域的面积计算得到:
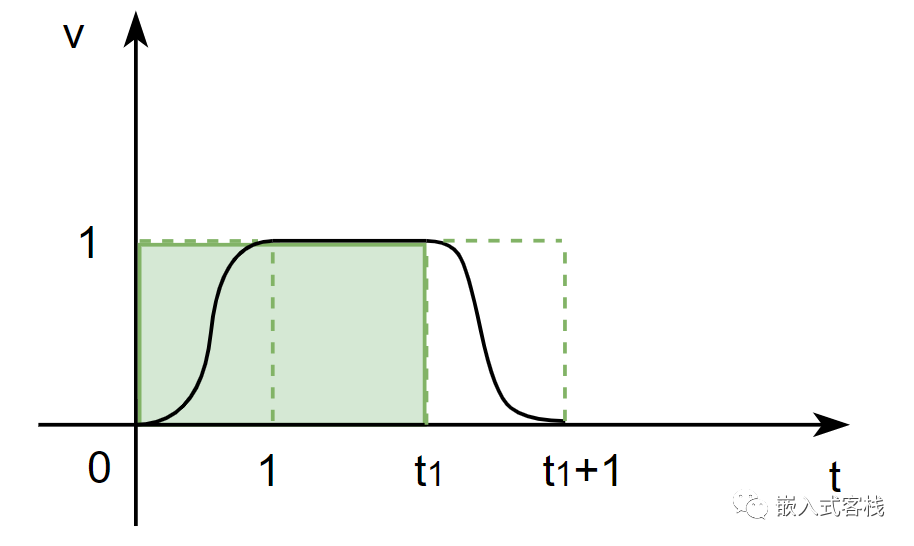
有了这样的数学模型,编码实现就是水到渠成的事情了。
总结一下
电机速度控制,一般尽量做到柔性调速,本文分享的步进电机的S-曲线调速数学算法模型,是一个非常棒的算法模型。速度一开始缓慢增加到快速增加,再回到缓慢增加直到速度达到设定期望速度。从设计上,兼顾了快速启停,又能尽最大程度降低加速度突变这一对矛盾。希望对有兴趣的朋友有所帮助。
-
STM32:F407步进电机S形加减速算法的实现相关资料分享2021-06-28 0
-
启动停止频繁步进电机加减速算法目的是什么2021-07-07 0
-
步进电机梯形加减速算法的原理是什么2021-07-07 0
-
步进电机梯形匀加速算法是什么2021-07-08 0
-
***的步进电机调速算法~ 精选资料推荐2021-09-01 0
-
分享一种超级实用的步进电机调速算法2021-09-03 0
-
怎么实现步进电机S型曲线加减速算法?2021-10-12 0
-
步进电机为啥需要设计一个调速算法?2021-10-29 0
-
步进电机加减速算法相关资料分享2022-01-11 0
-
一种高性能的步进电机运动控制系统设计2009-08-13 464
-
一种新型柔性加减速算法2016-04-29 587
-
一种基于单片机的步进电机调速离散控制方法2016-07-12 538
-
步进电机调速,S曲线调速算法你会吗?2022-01-25 717
-
步进电机驱动算法之梯形加减速算法2023-03-17 664
-
步进电机的调速算法2023-03-23 269
全部0条评论

快来发表一下你的评论吧 !
