

 机器人里的高效伺服系统
机器人里的高效伺服系统
描述
电子发烧友网报道(文/李宁远)在机器人行业里,伺服驱动是一个老生常谈的话题了。随着工业4.0的加速更迭,机器人的伺服驱动也随之升级。现在的机器人系统既要求驱动系统能控制更多的轴数,还要能实现更多智能化的功能。
在多轴工业机器人运行中的每个节点上,它必须在三个维度上使用不同大小的力才能完成设定的搬运等任务。机器人中的电机能够在精确的点提供可变速度和扭矩,控制器使用它们沿着不同的轴协调运动,从而实现精确的定位。在机器人完成搬运任务后,电机会减小扭矩,同时将机械臂返回到其初始位置。
这种高效伺服系统由高性能控制信号处理、精确感应反馈、电源以及智能电机驱动一起组成,提供复杂的接近瞬时响应的精确速度和扭矩控制。
高速实时伺服环路控制—控制信号处理与感应反馈
伺服环路实现高速数字化实时控制的基础离不开微电子制造工艺的升级。以最常见的三相电运行的机器人电机为例,PWM三相逆变器生成高频脉冲电压波形,以独立相将这些波形输出到电机的三相绕组中。在这三个功率信号中,电机负载的变化会影响感应、数字化并发送到数字处理器的电流反馈。再由数字处理器进行高速信号处理算法决定输出。
这里不仅要求数字处理器的高性能,对电源也有严格的设计要求。我们先看处理器部分,内核运算速度必须要跟上自动化升级的脚步,这个现在已经不再是问题。一些运控芯片将电机控制所必需的A/D转换器、位置/速度检测倍频计数器、PWM发生器等等与处理器内核集成于一体,使得伺服控制回路采样时间大大缩短,由单一芯片实现了自动加减速控制,齿轮同步控制,位置、速度、电流三环的数字化补偿控制。
控制算法如速度前馈、加速度前馈、低通滤波、凹陷滤波也在单芯片上实现。处理器的选取这里不再赘述,在此前的文章中已经对各类机器人应用做过分析,不管是低成本应用,还是对编程和算法有较高要求的应用目前市面上已经有很多选择,优势各异。
不只是电流反馈,其他的感应数据也会送到控制器中来跟踪系统电压和温度的变化。高分辨率的电流和电压检测反馈一直是电机控制里的难题。同时检测所有分流器/霍尔传感器/磁传感器的反馈无疑是最好的,不过这样对设计有很高的要求,而且计算能力要跟得上。
同时为了避免信号的丢失和干扰,在靠近传感器的边缘对信号进行数字化,随着采样率上升,信号漂移带来的数据错误也不少,设计需要通过感应和算法调整对这些变化进行补偿。这样伺服系统才能在各种条件下保持稳定。
可靠精准伺服驱动—电源与智能电机驱动
具有稳定高分辨率控制的超高速开关功能的电源为可靠精准的伺服控制供电,目前有很多厂商都有采用高频材料的集成式电源模块,设计起来容易了很多。
开关模式电源在基于控制器的闭环电源拓扑中运行,两种常用的电源开关是功率MOSFET和IGBT。栅极驱动器在采用开关模式电源的系统中很常见,开关模式电源通过对ON/OFF状态的控制在这些开关的栅极上进行调节电压和电流。
在开关模式电源和三相逆变器的设计上,各类高性能的智能栅极驱动器、内置FET的驱动器、集成控制功能的驱动器层出不穷。内置FET和电流采样功能的集成设计,可以大幅减少外部元器件的使用,PWM和使能、上下管、霍尔信号输入逻辑配置大大增加了设计的灵活性,既简化了开发流程,又提升了电源效率。
伺服驱动IC也将集成度发挥到最大,完全集成的伺服驱动IC可以大大缩短伺服系统出色动态性能的开发时间。预驱、传感、保护威廉希尔官方网站 和电源桥集成到一个封装中可以最大限度地降低整体功耗和系统成本。这里列的是Trinamic(ADI)的完全集成式的伺服驱动IC框图,所有控制功能都在硬件中实现,集成ADC、位置传感器接口、位置内插器,功能齐全适用于各种伺服应用。
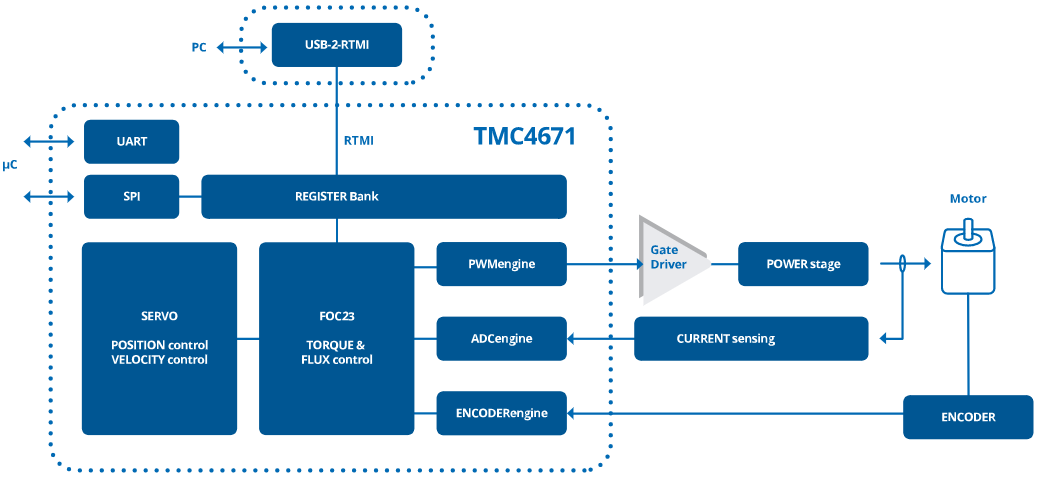
完全集成式伺服驱动IC,Trinamic(ADI)
小结
高效伺服系统里高性能控制信号处理、精确感应反馈、电源以及智能电机驱动缺一不可,高性能器件的相互配合才能给机器人实时提供在运动中瞬间响应的精确速度与扭矩控制。在更高的性能之余,各个模块的高集成度也提供了更低的成本和更高的工作效率。
打开APP阅读更多精彩内容
在多轴工业机器人运行中的每个节点上,它必须在三个维度上使用不同大小的力才能完成设定的搬运等任务。机器人中的电机能够在精确的点提供可变速度和扭矩,控制器使用它们沿着不同的轴协调运动,从而实现精确的定位。在机器人完成搬运任务后,电机会减小扭矩,同时将机械臂返回到其初始位置。
这种高效伺服系统由高性能控制信号处理、精确感应反馈、电源以及智能电机驱动一起组成,提供复杂的接近瞬时响应的精确速度和扭矩控制。
高速实时伺服环路控制—控制信号处理与感应反馈
伺服环路实现高速数字化实时控制的基础离不开微电子制造工艺的升级。以最常见的三相电运行的机器人电机为例,PWM三相逆变器生成高频脉冲电压波形,以独立相将这些波形输出到电机的三相绕组中。在这三个功率信号中,电机负载的变化会影响感应、数字化并发送到数字处理器的电流反馈。再由数字处理器进行高速信号处理算法决定输出。
这里不仅要求数字处理器的高性能,对电源也有严格的设计要求。我们先看处理器部分,内核运算速度必须要跟上自动化升级的脚步,这个现在已经不再是问题。一些运控芯片将电机控制所必需的A/D转换器、位置/速度检测倍频计数器、PWM发生器等等与处理器内核集成于一体,使得伺服控制回路采样时间大大缩短,由单一芯片实现了自动加减速控制,齿轮同步控制,位置、速度、电流三环的数字化补偿控制。
控制算法如速度前馈、加速度前馈、低通滤波、凹陷滤波也在单芯片上实现。处理器的选取这里不再赘述,在此前的文章中已经对各类机器人应用做过分析,不管是低成本应用,还是对编程和算法有较高要求的应用目前市面上已经有很多选择,优势各异。
不只是电流反馈,其他的感应数据也会送到控制器中来跟踪系统电压和温度的变化。高分辨率的电流和电压检测反馈一直是电机控制里的难题。同时检测所有分流器/霍尔传感器/磁传感器的反馈无疑是最好的,不过这样对设计有很高的要求,而且计算能力要跟得上。
同时为了避免信号的丢失和干扰,在靠近传感器的边缘对信号进行数字化,随着采样率上升,信号漂移带来的数据错误也不少,设计需要通过感应和算法调整对这些变化进行补偿。这样伺服系统才能在各种条件下保持稳定。
可靠精准伺服驱动—电源与智能电机驱动
具有稳定高分辨率控制的超高速开关功能的电源为可靠精准的伺服控制供电,目前有很多厂商都有采用高频材料的集成式电源模块,设计起来容易了很多。
开关模式电源在基于控制器的闭环电源拓扑中运行,两种常用的电源开关是功率MOSFET和IGBT。栅极驱动器在采用开关模式电源的系统中很常见,开关模式电源通过对ON/OFF状态的控制在这些开关的栅极上进行调节电压和电流。
在开关模式电源和三相逆变器的设计上,各类高性能的智能栅极驱动器、内置FET的驱动器、集成控制功能的驱动器层出不穷。内置FET和电流采样功能的集成设计,可以大幅减少外部元器件的使用,PWM和使能、上下管、霍尔信号输入逻辑配置大大增加了设计的灵活性,既简化了开发流程,又提升了电源效率。
伺服驱动IC也将集成度发挥到最大,完全集成的伺服驱动IC可以大大缩短伺服系统出色动态性能的开发时间。预驱、传感、保护威廉希尔官方网站 和电源桥集成到一个封装中可以最大限度地降低整体功耗和系统成本。这里列的是Trinamic(ADI)的完全集成式的伺服驱动IC框图,所有控制功能都在硬件中实现,集成ADC、位置传感器接口、位置内插器,功能齐全适用于各种伺服应用。
完全集成式伺服驱动IC,Trinamic(ADI)
小结
高效伺服系统里高性能控制信号处理、精确感应反馈、电源以及智能电机驱动缺一不可,高性能器件的相互配合才能给机器人实时提供在运动中瞬间响应的精确速度与扭矩控制。在更高的性能之余,各个模块的高集成度也提供了更低的成本和更高的工作效率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人热潮中的伺服系统2018-10-12 0
-
基于图像的机器人视觉伺服系统该怎么设计?2019-09-27 0
-
机器人是如何实现运作的呢2021-09-17 0
-
机器人视觉伺服系统的标定2009-05-30 593
-
基于MatlabRTW的机器人伺服系统设计方案2009-10-06 750
-
基于DSP的机器人视觉伺服系统设计2011-10-08 2141
-
机器人伺服系统详解(组成/原理框图/执行元件/发展趋势)2018-07-10 27820
-
工业机器人专用伺服系统市场概况2019-04-29 7438
-
机器人视觉伺服控制系统的应用类型及发展趋势分析2021-04-08 12019
-
PLC的工业机器人关节直流伺服系统2021-09-17 1944
-
伺服系统在工业机器人的应用2022-09-09 2147
-
Arduino和微型伺服系统制作的机器人2022-10-19 543
-
一文了解机器人伺服系统2023-11-01 1086
-
国产可编程硅振在机器人伺服系统中的应用,替换SiTime2024-09-26 254
-
伺服系统在机器人中的作用 伺服系统与传统电机对比2024-12-10 307
全部0条评论

快来发表一下你的评论吧 !
