

加速ROS2为机器人带来自适应计算能力
电子说
1.3w人已加入
描述
从ROS到ROS2
机器人的自适应计算
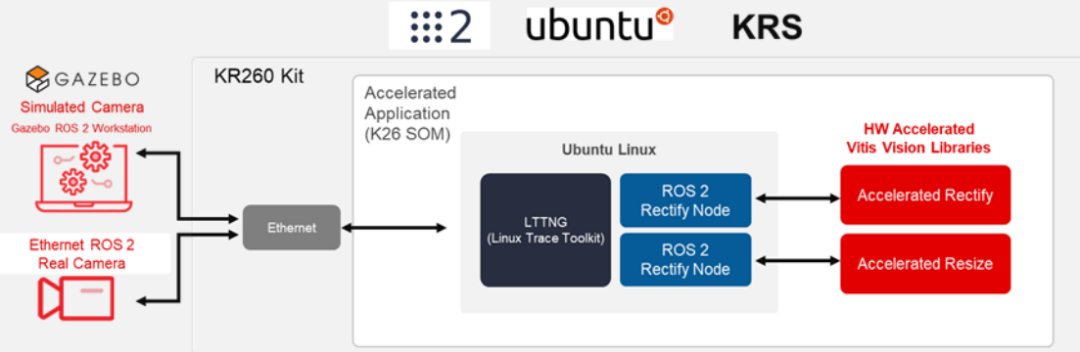
ROS2与机器人自适应计算


写在最后


更多热点文章阅读
马斯克:预计6个月后进行大脑芯片的人体试验,愿意给自己孩子植入 硅料降价拐点来临,光伏市场有望重启装机潮 造车新势力11月销量:哪吒第一,蔚理进前三,小鹏依旧垫底 行业机构频发警报 2023年全球半导体市场面临下滑风险 富士康失去iPhone 14 Pro独家代工资格!立讯和硕上位,果链格局大变?
原文标题:加速ROS2为机器人带来自适应计算能力
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 电子发烧友网
-
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?2024-03-01 0
-
基于结构自适应的多机器人协作机制研究2012-08-20 0
-
RT-Thread实时操作系统与ROS2是怎样进行通信的2022-04-01 0
-
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!2023-11-30 0
-
机器人领域之所以增长速度快,与机器人操作系统ROS跟ROS2密不可分2018-10-18 1958
-
【自适应计算在机器人领域的应用】连载六:自适应计算平台实现ROS之路2021-11-11 3471
-
【自适应计算在机器人领域的应用】连载五:为什么是通过ROS 2集成自适应计算?2021-11-11 3147
-
Micro-ROS:把ROS2放在MCU上2022-04-07 7730
-
AR机器人公司发布机器人操作系统(ROS)硬件加速框架ROBOTCORE2022-06-16 2088
-
加速ROS2为机器人带来自适应计算能力2022-12-12 1738
-
了解ROS2是什么2023-02-28 21194
-
机器人中的自适应计算2023-09-14 203
-
Versal:首款自适应计算加速平台(ACAP)2023-09-18 338
-
【ALINX 技术分享】AMD Versal AI Edge 自适应计算加速平台之 Versal 介绍(2)2024-03-07 1028
全部0条评论

快来发表一下你的评论吧 !
