

焊接机器人工作站的组成结构有哪些?
电子说
描述
焊接机器人工作站的组成结构有哪些?企业在完成焊接作业的过程中,传统焊接无法满足日益增长的焊接需求,企业开始使用焊接机器人来代替传统焊接,焊接机器人厂家还会配备相关辅助设备,焊接机器人工作站就包括焊接机器及其辅助设备,无锡金红鹰作为焊接机器人的生产厂家,带您了解焊接机器人工作站的结构组成。
很多客户在了解焊接机器人的时候,不了解焊接机器人工作站是什么,其实焊接机器人工作站包括焊接机器人本体、焊接变位机、轨道行走系统、焊缝自动寻位系统、清枪器等。
焊接机器人工作站的组成结构:
1、焊接机器人
焊接机器人是从事焊接的工业机器人。焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。

1)机器人本体,一般是伺服电机驱动的 6 轴关节式操作机,它由驱动器、传动机构、机械手臂、关节以及内部传感器等组成。它的任务是精确地保证机械手末端(悍枪)所要求的位置、姿态和运动轨迹。无锡金红鹰系列焊接机器人包括臂长一米五、一米八和两米三种型号。
2)机器人控制柜,它是机器人系统的神经中枢,包括计算机硬件、软件和一些专用威廉希尔官方网站 ,负责处理机器人工作过程中的全部信息和控制其全部动作。
2、焊接变位机
焊接变位机是焊接辅助设备,是用来拖动待焊工件,使其待焊焊缝运动至理想位置进行施焊作业的产品。
生产大型设备的厂家都会在旋转和拖拽工件的工作存在困难,焊接变位机可以辅助焊接机器人拖拽和旋转工件,使得焊缝更好的呈现在焊枪的范围内,提高焊接机器人的焊接精度。
焊接变位机种类
1)伸臂式焊接变位机
伸壁式焊接变位机结构特点与性能 回转工作台安装在伸臂一端,伸臂一般相对于某倾斜轴成角度回转,而此倾斜轴的位置多是固定的,但有的也可小于100°的范围内上下倾斜。该机变位范围大,作业适应性好,但整体稳定性差。其适用范围为1t以下中小工件的翻转变位。在手工焊中应用较多。多为电动机驱动,承载能力在0.5t以下,适用于小型罕见的翻转变位。也有液压驱动的,承载能力多,适用于结构尺寸不大,但自重较大的焊件。
2)座式焊接变位机
座式焊接变位机工作台有一个整体翻转的自由度。可以将工作翻转到理想的焊接位置进行焊接。另外工作台还有一个旋转的自由度。该种变位机已经系列化生产,主要用于一些管,盘的焊接。工作台边同回转机构支承在两边的倾斜轴上,工作台以焊速回转,倾斜边通过扇形齿轮或液压油缸,多在140°的范围内恒速倾斜。该机稳定性好,一般不用固定在地地基上,搬移方便。其适用范围为1至50t工件的翻转变位,是应用最广泛的结构形式,常与伸缩臂式焊接操作机配合使用。
3)双座式焊接变位机
双座式焊接变位机是集翻转和回转功能于一身的变位机械。翻转和回转分别由两根轴驱动,夹持工件的工作台除能绕自身轴线回转外,还能绕另一根轴做倾斜或翻转,它可以将焊件上各种位置的焊缝调整到水平的或“船型”的易焊位置施焊,适用于框架型,箱型,盘型和其他非长型工件的焊接。
金红鹰焊接变位机:
金红鹰单轴焊接变位机

单轴焊接变位机,头架驱动,尾架从动。主要用于工件的焊接;头架与尾架上的工作台可以翻转,使被焊工件处于位置。一个单轴焊接变位机由两个尾座,框架,底板。伺服电机,减速机等部件组成,标准规格为1800*800承载300公斤、承载500公斤,2500*800承载300公斤、承载500公斤四款,重复精度可达到加减0.1mm。还可根据实际使用情况对尺寸进行调整,出图加工。定制变位机需确定焊接工件长度、承载、适配什么的机器人,是否需要联动。
金红鹰双轴焊接变位机

在单轴焊接变位机的基础上加上一轴,使得焊接变位机兼具回转和翻转的功能,能够满足更多工件的焊接需要。
金红鹰三轴焊接变位机

三轴焊接变位机是双工位设计,能够满足一边焊接一边上料的操作,能大幅提高机器人焊接效率,时间24小时连续作业。
3、轨道行走系统
根据各种型号不同,焊接机器人的焊接范围也有一定的限制,轨道行走系统可以延长焊接机器人的行走轨迹,适用工件较长、焊点准确、大型钢结构等工件的焊接,通过搭配轨道行走系统大大提高了焊接机器人的焊接范围。
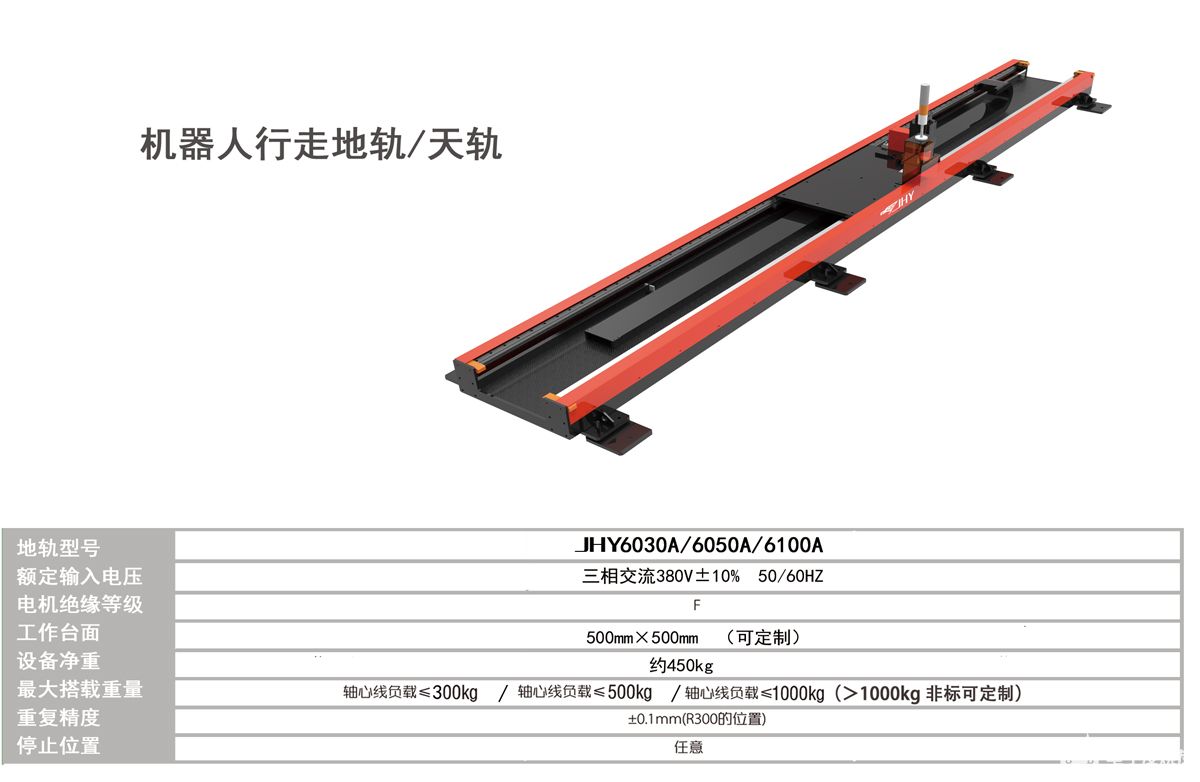
轨道行走系统的组成
1、轨道基座
2、重载滚轮导轨齿条
3、进口伺服系统及行星减速机
4、装有润滑系统,能持续实现自动润滑功能。
5、防尘系统(全封闭形式)
6、行程极限开关
7、缓冲装置
8、进口高柔性静音拖链
4、清枪器
清枪器顾名思义是一种清洁装置,主要是用作机器人焊枪的清理,帮助清除焊枪在自动焊接工作过程中产生的粘堵在焊枪气体保护套内的飞浅物,用于确保气体长期畅通无阻,阻隔空气进入焊接区,保护焊接溶池提高焊缝质量。能有效清理导电咀上焊烟产生的积尘,疏通清理连接管上保护气体出气孔,给保护套喷洒耐高温防堵济,降低焊渣对枪套、枪咀的死粘连,增加耐用度。
自动焊接机器人的焊枪是一个比较精细的部件,在自动焊接机器人对焊缝智能识别后,可以自行调用系统中的焊接参数对工件进行焊接,通过电弧加热使得焊材熔化,焊枪来进行填充焊缝,在这过程中,焊枪是自动焊接机器人和工件进行直接对接的结构,焊枪中经常会出现杂质或者焊丝,这就需要清枪器来进行清理。
5、焊缝自动寻位系统
为了提高焊接精度,搭配焊缝自动寻位系统,可以对焊缝进行准确焊接,提高产品焊缝的合格率,实现稳定焊接。
构成及原理
由激光器、光学传感器和中央处理器构成,采用光学传播与成像原理,得到激光扫描区域各个点的位置信息,通过复杂的程序算法完成对常见焊缝的在线实时检测。
解决问题
可以一键解决如检测范围、检测能力以及焊接过程中的常见问题;
可以实现实时纠正焊缝偏差,智能实时跟踪,引导焊枪自动焊接;
可以有效解决焊缝偏差带来的问题,确保焊缝成型质量。
适用范围
通过PLC预留的IO口可以与焊机、文本屏、PLC或工控机等进行IO通讯,实现更好的连接和自动化控制。
适用于直缝焊机、环缝焊机、焊接小车、龙门架、十字架焊接机等各类焊接专机以及焊接机器人。
以上就是焊接机器人工作站组成结构的全部内容,如果您对以上产品感兴趣可以联系无锡金红鹰:4008-258-628,我们是第一批从事焊接机器人生产的企业,拥有超过20年的行业经验,出售包括焊接机器人、变位机、清枪器等产品。
审核编辑 黄宇
-
焊接机器人的结构组成是什么?2020-03-20 0
-
焊接机器人的结构与原理2020-11-16 0
-
焊接机器人及其应用2016-08-03 1283
-
焊接机器人工作站的构成及应用2017-11-02 2833
-
焊接机器人工作站组成结构图_焊接机器人工作站优势2019-10-14 13581
-
焊接机器人工作站的主要设备都有哪些2020-06-19 5294
-
机器人焊接工作站包括哪些组成部分?2022-12-30 3295
-
焊接机器人的结构有哪些?2023-01-10 9583
-
焊接机器人的组成有哪些部件2023-02-03 4093
-
焊接机器人焊接作业过程中为什么会出现咬边?如何解决?2023-03-06 3803
-
焊接机器人工作站的组成部分有哪些2023-05-13 1426
-
焊接机器人工作站特点有哪些2023-05-16 760
-
焊接机器人工作站工作流程2023-07-20 1108
-
焊接机器人的结构组成2023-07-31 1543
-
焊接机器人工作站由哪些部分构成?各有什么作用?2024-01-30 728
全部0条评论

快来发表一下你的评论吧 !
