

Free RTOS的计数型信号量
描述
上篇讲解了二值信号量,二值信号量只能判断有无,而不能确定事件发生的次数,因此我们为了确定事件的次数引入了计数型信号量!
使用计数型信号量时,需要在FreeRTOSConfig.h中加入一行配置代码
//为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 1
仔细阅读源码的同学就会发现有很多类似的代码(如下图),这些代码让FreeRTO可以实现不同需要的裁剪,以减少系统开销

创建计数型信号量
xSemaphoreCreateCounting( UBaseType_t uxMaxCount, UBaseType_t uxInitialCount )
参数:
uxMaxCount:计数信号量最大计数值,但信号量值等于此值的时候,释放信号量就会失败
uxInitialCount :计数信号量初始值
返回值:
NULL:计数信号量创建失败
其他值:计数信号量创建成功,返回计数信号量句柄
释放信号量
非中断释放
xSemaphoreGive( SemaphoreHandle_t xSemaphore )
参数:
xSemaphore : 要释放的信号量句柄
返回值:
pdPASS: 释放信号量成功
errQUEU_FULL:释放信号量失败
中断释放
BaseType_t xSemaphoreGiveFromISR( SemaphoreHandle_t xSemaphore,
BaseType_t* pxHigherPriorityTaskWoken)
参数:
xSemaphore:要释放的信号量句柄
pxHigherPriorityTaskWoken:标记退出此函数后是否需要进行任务切换,pxHigherPriorityTaskWoken是可选参数,可以设置为NULL。当该值为pdTRUE的时候在退出中断服务函数之前一定要进行一次任务切换。
返回值:
释放成功返回pdPASS,失败返回errQUEUE_FULL
获取信号量
非中断获取
BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,
TickType_t xBlockTime)
参数:
xSemaphore:要释放的信号量句柄
xBlockTime:阻塞时间
返回值:
获取成功返回pdTRUE,失败返回pdFALSE
中断获取
BaseType_t xSemaphoreTakeFromISR( SemaphoreHandle_t xSemaphore,
BaseType_t* pxHigherPriorityTaskWoken)
参数:
xSemaphore:要释放的信号量句柄
pxHigherPriorityTaskWoken:标记退出此函数后是否需要进行任务切换
返回值:
获取成功返回pdTRUE,失败返回pdFALSE
注意:不管是二值信号量、计数型信号量还是互斥信号量,它们都使用上面的释放信号量和获取信号量API函数
源码例程
#include "stm32f10x.h"
#include
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE); //开启时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOC,GPIO_Pin_0); //将LED端口拉高,熄灭LED
}
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //选择你要设置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;//下拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定义GPIO结构体变量
USART_InitTypeDef USART_InitStruct; //定义串口结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的时钟
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9为复用推挽输出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引脚
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10为浮空输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //发送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //无奇偶校验
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //无硬件数据流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函数
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函数
{
USART_SendData(USART1,(uint8_t)ch); //发送一字节数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待发送完成
return ch;
}
#define START_TASK_PRIO 1 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void Start_Task(void *pvParameters);//任务函数
#define Send_TASK_PRIO 2 //任务优先级
#define Send_STK_SIZE 50 //任务堆栈大小
TaskHandle_t SendTask_Handler; //任务句柄
void Send_Task(void *p_arg); //任务函数
#define Receive_TASK_PRIO 2 //任务优先级
#define Receive_STK_SIZE 50 //任务堆栈大小
TaskHandle_t ReceiveTask_Handler; //任务句柄
void Receive_Task(void *p_arg); //任务函数
SemaphoreHandle_t CountSem_Handle =NULL; //计数型信号量句柄
int main( void )
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组 4
LED_Init(); //初始化 LED
KEY_Init();
USART_init(9600);
//创建开始任务
xTaskCreate(
(TaskFunction_t )Start_Task, //任务函数
(const char* )"Start_Task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler //任务句柄
);
vTaskStartScheduler(); //开启调度
}
//开始任务函数
void Start_Task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
CountSem_Handle = xSemaphoreCreateCounting(5,0);
//创建 发送 任务
xTaskCreate(
(TaskFunction_t )Send_Task,
(const char* )"Send_Task",
(uint16_t )Send_STK_SIZE,
(void* )NULL,
(UBaseType_t )Send_TASK_PRIO,
(TaskHandle_t* )&SendTask_Handler
);
//创建 接收 任务
xTaskCreate(
(TaskFunction_t )Receive_Task,
(const char* )"Receive_Task",
(uint16_t )Receive_STK_SIZE,
(void* )NULL,
(UBaseType_t )Receive_TASK_PRIO,
(TaskHandle_t* )&ReceiveTask_Handler
);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//发送 任务函数
void Send_Task(void *pvParameters)
{
BaseType_t xReturn = NULL;
while(1)
{
if (CountSem_Handle != NULL)
{
xReturn = xSemaphoreGive(CountSem_Handle);
if (xReturn == pdTRUE){
printf("信号量释放成功n");
}
else{
printf("信号量释放失败n");
}
}
vTaskDelay(1000);
}
}
//接收 任务函数
void Receive_Task(void *pvParameters)
{
BaseType_t xReturn = NULL;
uint16_t count = 0;
while(1)
{
// 等待获取信号量
xReturn = xSemaphoreTake(CountSem_Handle, portMAX_DELAY);
if (xReturn == pdTRUE)
{
count = uxSemaphoreGetCount(CountSem_Handle);
printf("%dn",count);
}
else
{
printf("获取信号量失败n");
}
vTaskDelay(2000);
}
}
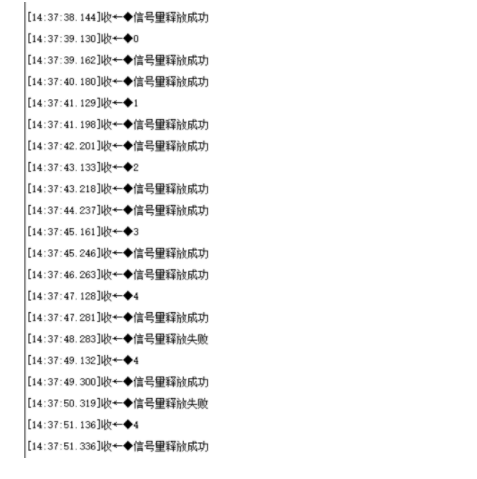
实验现象
--END--
-
二值信号量和计数信号量的区别是什么?2022-11-11 0
-
FreeRTOS信号量使用教程2022-12-19 3199
-
【MiCOKit试用体验】庆科MiCO系统篇(2)MiCO RTOS信号量2015-10-24 0
-
信号量是什么?信号量怎么运作2022-01-05 0
-
怎样通过串口来显示FreeRTOS计数型信号量的数值呢2022-02-28 0
-
二值信号量和计数信号量的区别是什么?系统怎么区分是二值还是计数呢2022-10-09 0
-
关于RTOS中的信号量问题2023-10-31 0
-
你了解Linux 各类信号量?2019-05-04 2515
-
Linux信号量(2):POSIX 信号量2020-10-29 706
-
韦东山freeRTOS系列教程之信号量(6)2021-12-13 5060
-
ThreadX(六)------信号量semaphore2021-12-28 642
-
FreeRTOS信号量计数示例分享2022-09-15 917
-
FreeRTOS的二值信号量2023-02-10 1501
-
Free RTOS的互斥信号量2023-02-10 1171
-
使用Linux信号量实现互斥点灯2023-04-13 803
全部0条评论

快来发表一下你的评论吧 !
