

KUKAC4机器人首次开机启动
描述
1.首次开机启动,电池的电源线(X305)是没有接的,需要插上,X305.
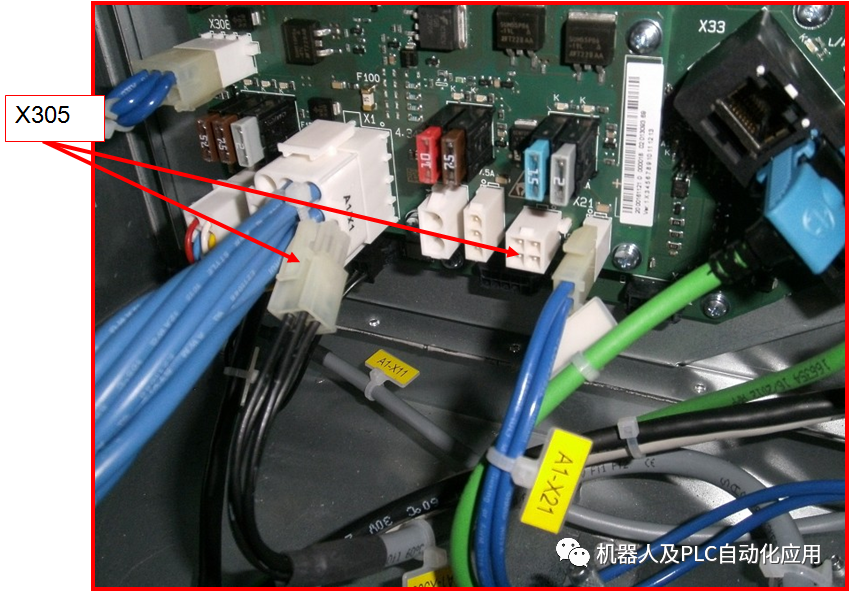
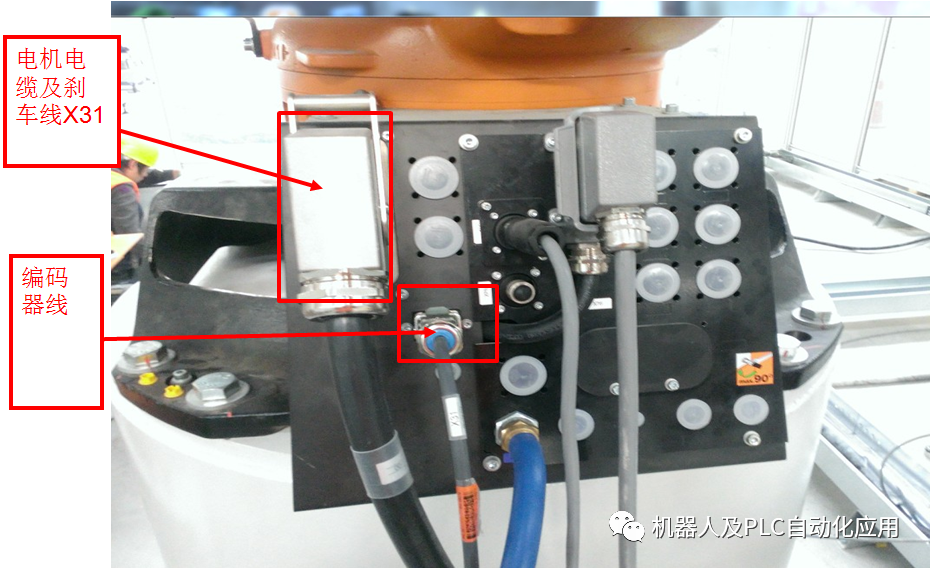
检查机器人本体接线.
接线检查完毕,打开开关,顺时针方向,首次开机时间比较长,耐心等待.
机器人第一次上电,示教器有时会出现如下界面,届时请耐心等待机器人最后的上电完成,进入到KSS系统里,图片如下:正在升级smartPAD与PC系统向匹配.

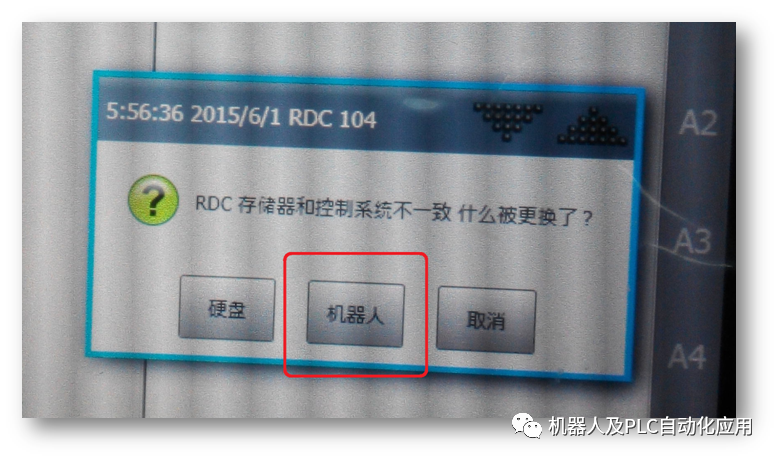
首次开机页面,显示以下查询:RDC 存储器和控制系统不一致 什么被更换了,用按键 机器人确认, 显示以下信息:网络配置已还原.用按键 OK确认。用按键 全部 OK确认在信息窗口可以被确认的所有信息
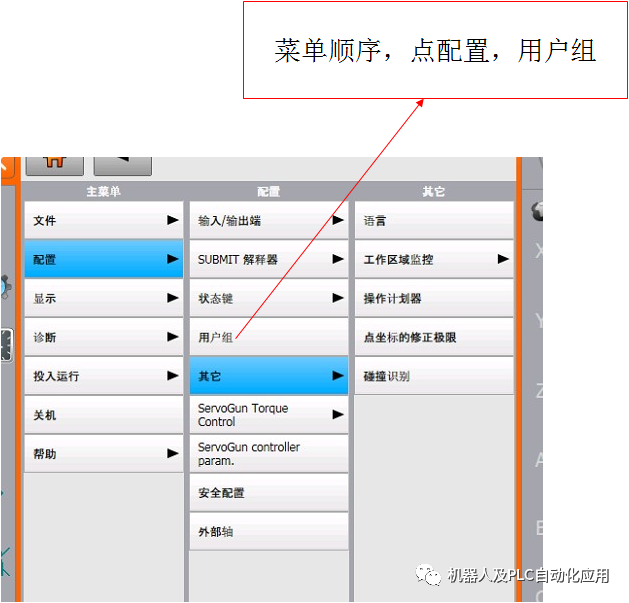
使用专家盘,登陆专家用户
进入菜单“主菜单>配置>安全配置”,如果有弹出如下的界面,单击“是”,如图
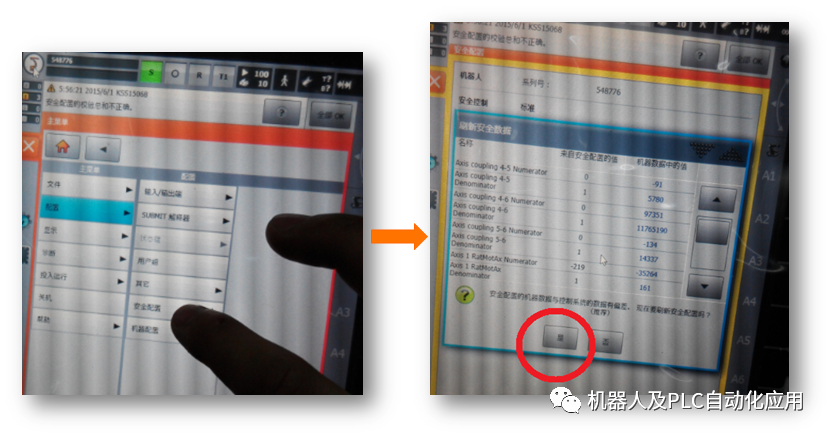
选择刷新安全数据!
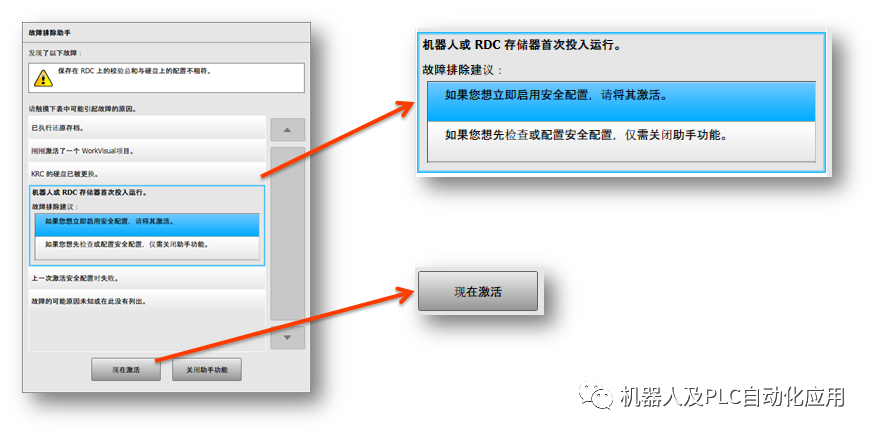
激活"投入运行模式"

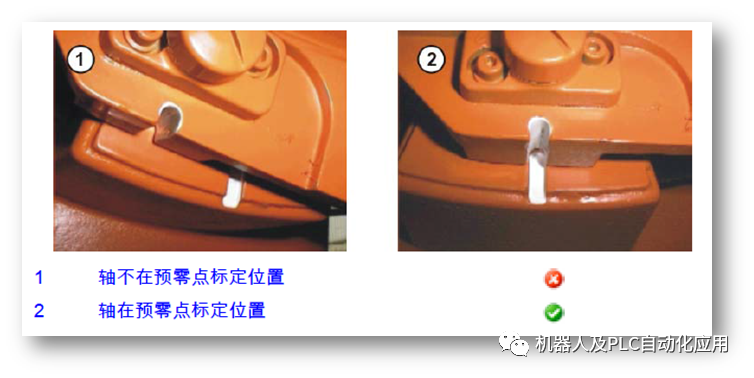
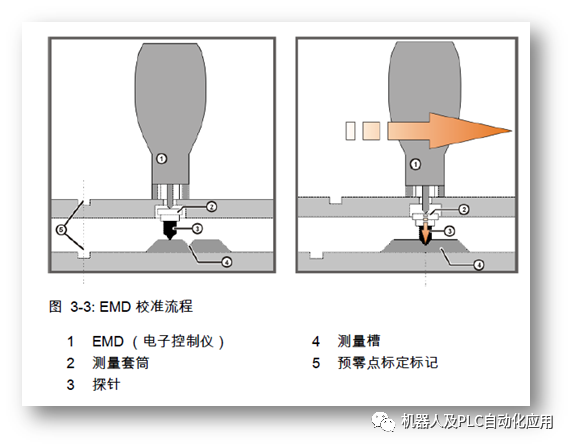
使用EMD逐个轴进行零点校正.
主菜单>投入运行>售后服务>HMI最小化
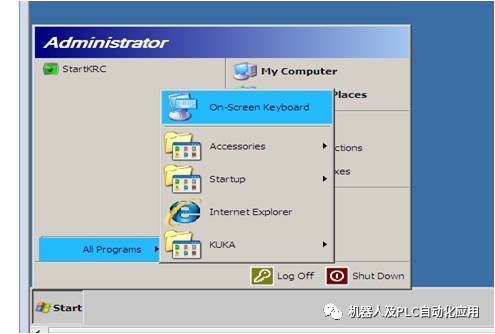
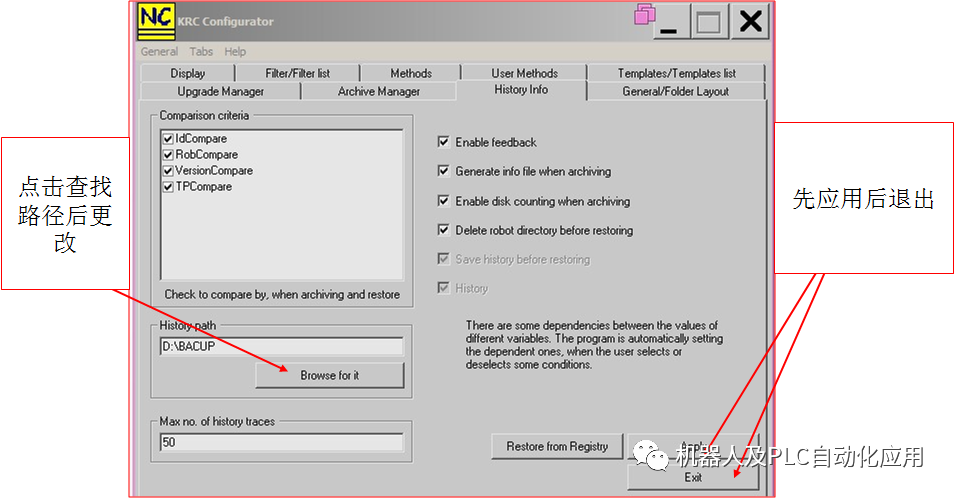
然后找到路径C:KRCUTILKRCCONFIGURATOR
打开KrcConfigurator.exe程序
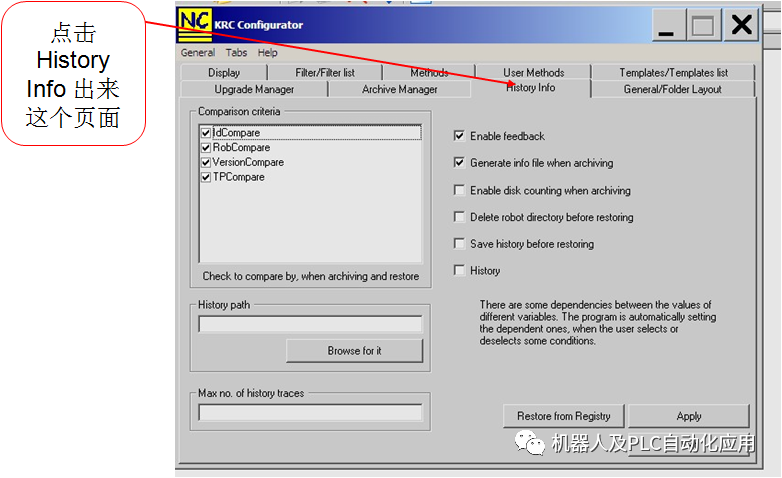
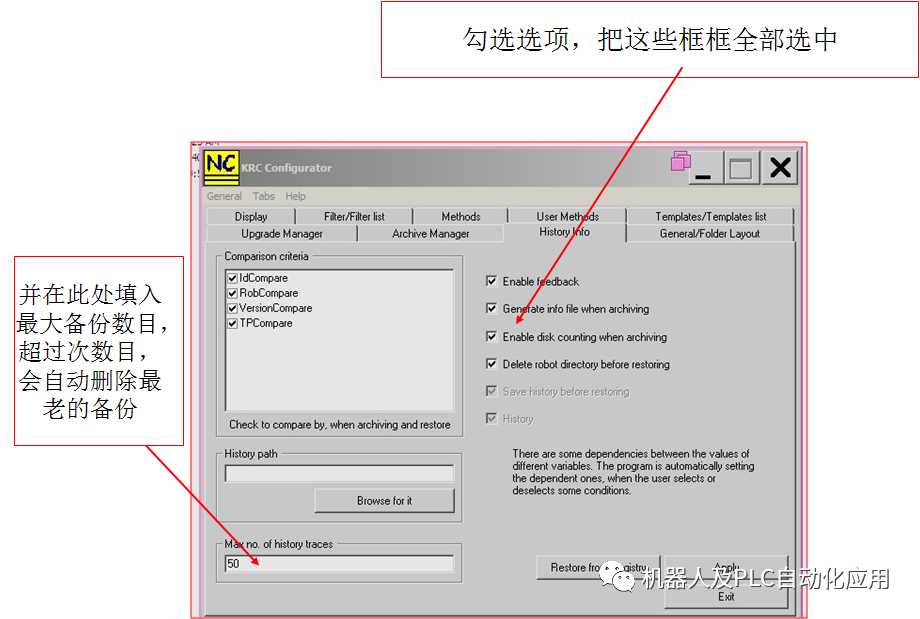
更改保存路径,改为U盘保存,点击Apply应用下,点击Exit退出程序。
选中date and time 后点击左上角file,选择open及打开.
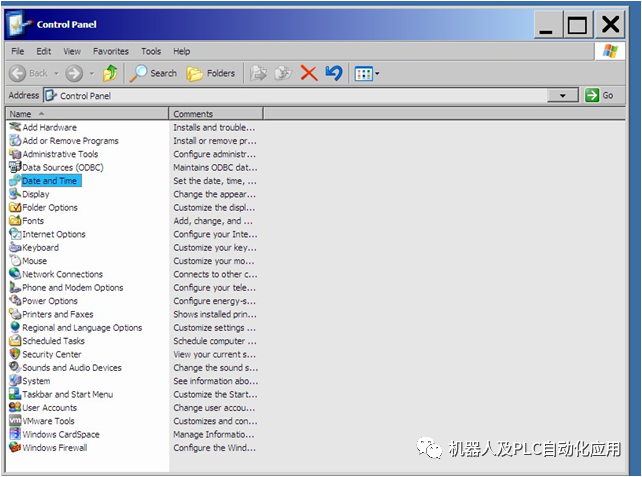
更改机器人时间
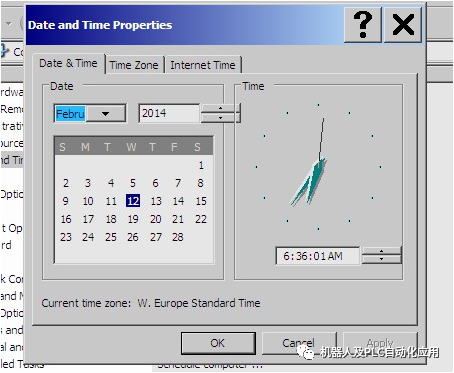
点时间按钮就显示刚刚设置的时间了.

如果是8.2大众系统有时需要选择复制机器人参数,在硬盘中寻找与实体机器人型号相同的型号文件.
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人餐厅2014-07-26 0
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
nao机器人与其他机器人的区别2015-02-13 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
机器人基础书籍2019-05-22 0
-
ABB机器人维修保养指南2020-08-19 0
-
库卡KUKA机器人四种启动方式介绍2020-09-04 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
什么是服务机器人2021-09-17 0
-
机器人是什么?2022-03-31 0
-
KUKAC4机器人焊钳拉拽程序分析sg_fehler ()w2021-01-18 3181
-
关于KUKAC4机器人测量工具坐标的作用浅析2021-04-25 5554
-
KUKAC4机器人零点校正详细步骤2022-12-12 8504
-
介绍一下KUKAC2机器人关于INTERBUS PCI卡进行主从配置的文件2023-02-20 2394
-
KUKA KRC4机器人首次开机启动2023-03-30 1438
全部0条评论

快来发表一下你的评论吧 !
