

聊一聊步进电机的几件事 还有彩蛋
描述
本文希望可以帮助初学者,了解步进电机的工作原理以及如何驱动步进电机。然后给出一个设计实例,如何使用Arduino Mega结合 ADI 的 TMC5130-EVAL来驱动步进电机。
什么是步进电机?步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。对于步进电机,每输入一个脉冲信号,转子就转动一个角度或前进一步。其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。下面看一个简单的双极电机:
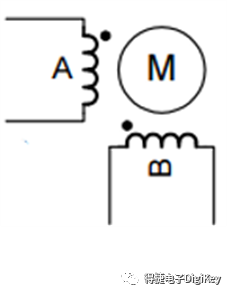
双极步进电机有四根电线和两个线圈。要使其旋转,需要通过线圈发送电流。每根电线都需要能够被高低驱动。以下是如何驱动电流使步进电机旋转。
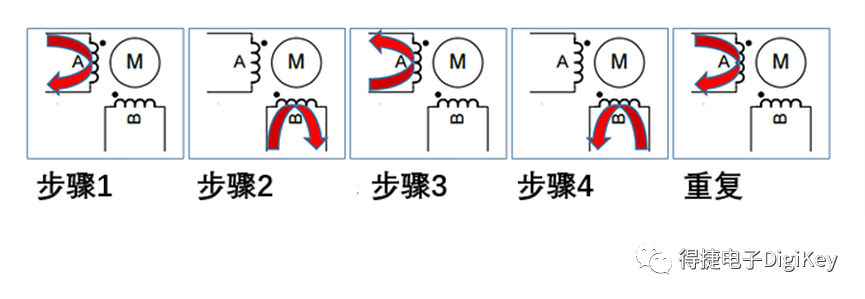 图 2. 双极步进电机
图 2. 双极步进电机
要理解为什么这样做,请考虑一个只有四个步骤的简单步进电机。在第一阶段,它将磁体与第一线圈对齐。下一步将磁体旋转90度。通过第一线圈反向发送电流会反转磁体极性。相反的线圈被连接,但相对于中心磁体产生相反的磁场。
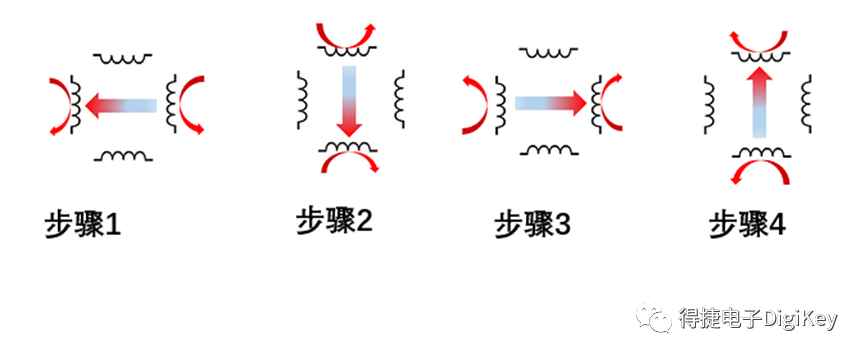 图 3. 步进电机转动四个步骤
图 3. 步进电机转动四个步骤
当然,大多数步进电机的步数超过4步。你的标准步进电机每转200步。以这种方式旋转电机称为全步进。一旦你完成了全步工作,半步是非常简单的。你可以同时通过两个线圈发送电流,这将使分辨率加倍。
步进电机驱动器也可以使用微步进,微步进调节通过线圈的电流。典型的电机控制器可以在每一个完整的步骤中执行16个微步骤。一些芯片负责调制电流,但较旧的芯片需要为其驱动的步进电机“调谐”。微步进进一步将整个步进划分为256微步进,使典型的200步进电机变成51200步进电机!微步进还降低了电机的噪音,使其运行更平稳、更高效。
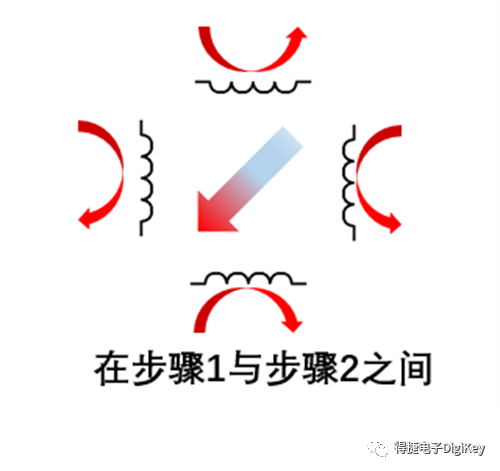 图 4. 完整步骤1和2之间的半步
如何控制线圈中的电流控制通过绕组的电流的最常见设置是使用所谓的H桥。它是一组四个晶体管,可以将每条导线拉高或拉低。你也可以用MOS管代替晶体管,但布线会有点不同。该图显示了如何通过H桥向任意方向发送电流。你只需要打开路径中的晶体管。
图 4. 完整步骤1和2之间的半步
如何控制线圈中的电流控制通过绕组的电流的最常见设置是使用所谓的H桥。它是一组四个晶体管,可以将每条导线拉高或拉低。你也可以用MOS管代替晶体管,但布线会有点不同。该图显示了如何通过H桥向任意方向发送电流。你只需要打开路径中的晶体管。
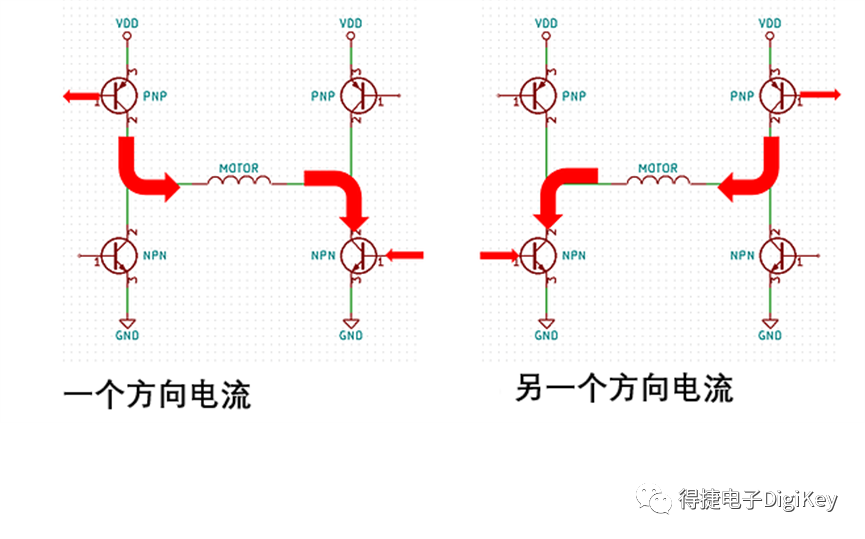 图5. 线圈中的电流方向
图5. 线圈中的电流方向
你必须确保同一侧的两个晶体管不能同时导通。这将通过提供从电源到接地的低电阻路径使威廉希尔官方网站 短路。你还应注意,晶体管可能需要一段时间才能从接通切换到断开。除非你知道自己在做什么,否则不建议快速切换通过线圈的电流。
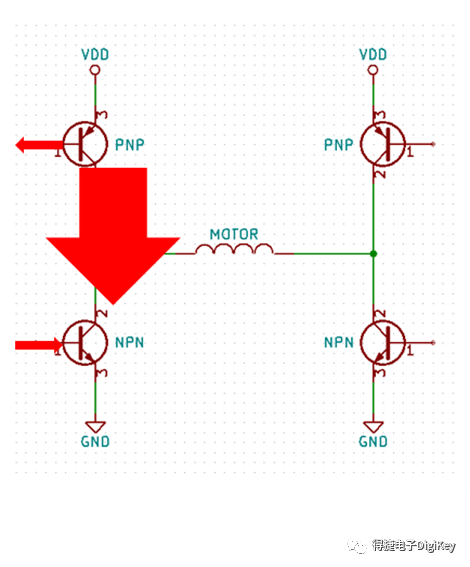 图 6 . 必须确保同一侧的两个晶体管不能同时导通这仍然不是全貌。旋转电机将产生电压。为了保护晶体管,最好放置二极管。
图 6 . 必须确保同一侧的两个晶体管不能同时导通这仍然不是全貌。旋转电机将产生电压。为了保护晶体管,最好放置二极管。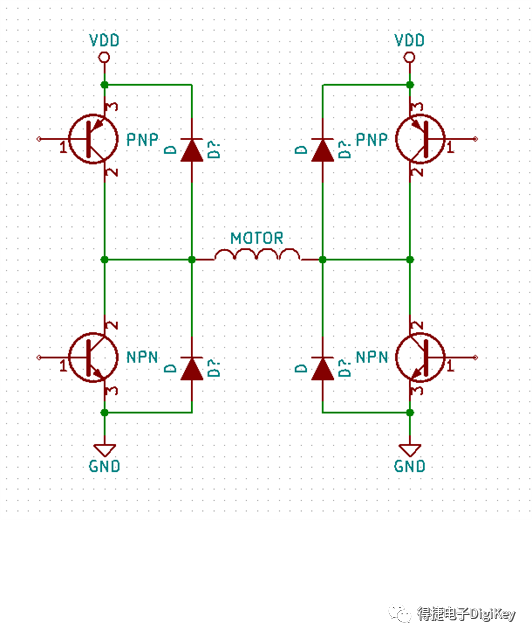 图7. 用于保护晶体管的二极管
图7. 用于保护晶体管的二极管
这将防止电机产生高压,这可能会破坏晶体管甚至驱动器。如果驱动步进电机的电压高于MCU输出的电压,则需要添加另一个晶体管来控制PNP晶体管。
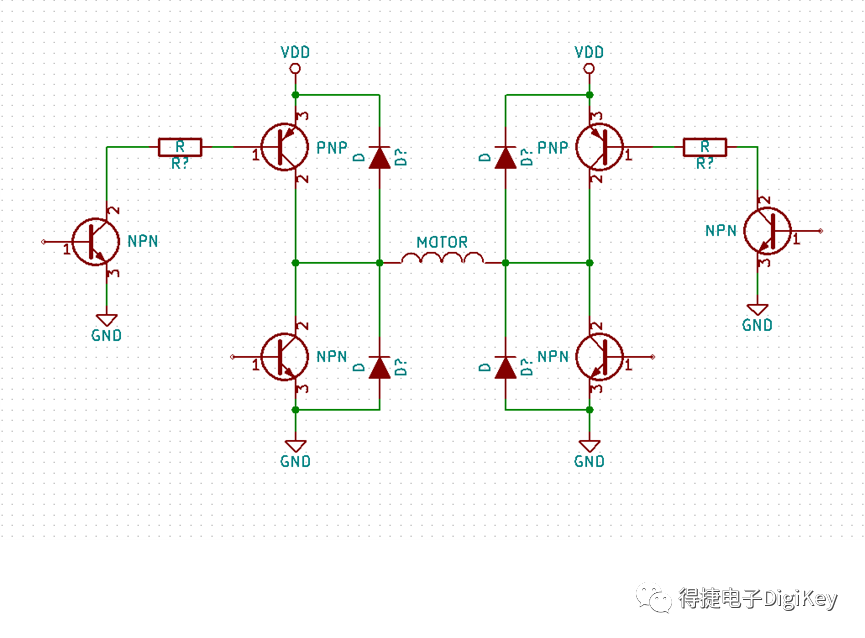 图8. 使用另一个晶体管来控制PNP晶体管
图8. 使用另一个晶体管来控制PNP晶体管
当你打开额外的NPN晶体管时,它将允许电流从PNP晶体管的基极(引脚1)流出,从而打开它。现在所需要的只是所有NPN晶体管基极上的限流电阻。
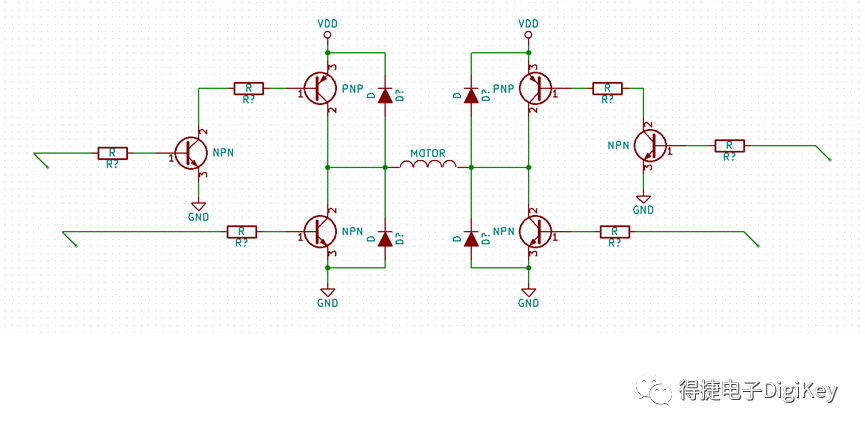 图 9. NPN晶体管基极加上的限流电阻
图 9. NPN晶体管基极加上的限流电阻
就是这样!该H桥将控制通过其中一个绕组的电流。由于有两个绕组,我们需要将这个威廉希尔官方网站 加倍。
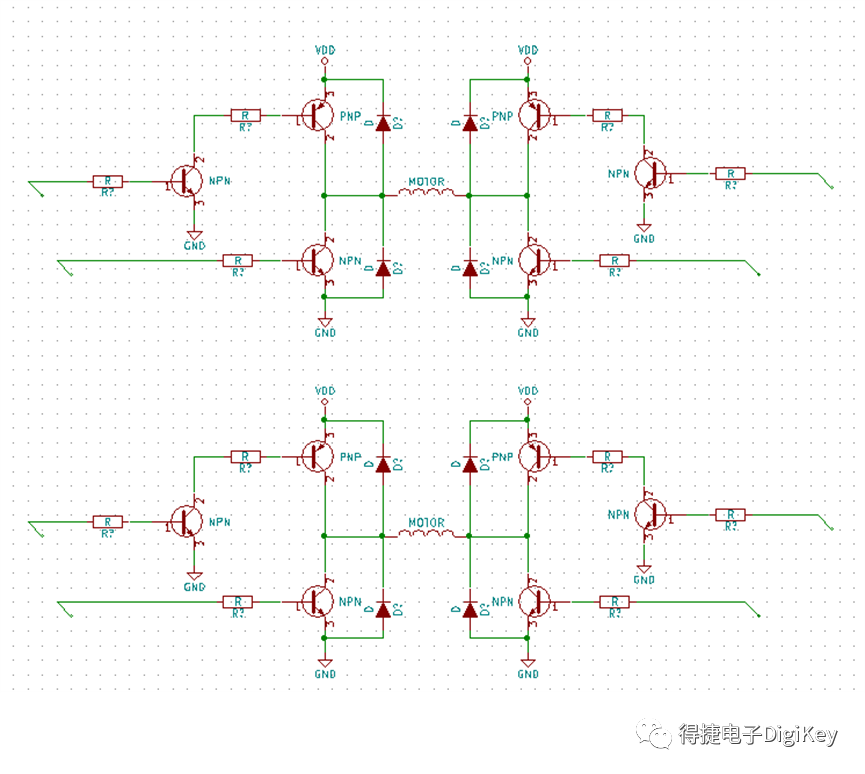 图10. 双H桥驱动步进电机
图10. 双H桥驱动步进电机
现在,你可以很好地计算所需的组件。使用双H桥并不是驱动步进电机的唯一方法。你也可以购买步进电机驱动器,它将内置双H桥(尽管驱动器通常使用MOS管和其他技巧)。如果你想减少BOM数量(有时获得更多功能),我建议你看看步进电机驱动器。你需要查看数据表以了解芯片提供的功能。一些芯片只提供晶体管和二极管,而其他芯片则完全控制通过线圈的电流。
微步进
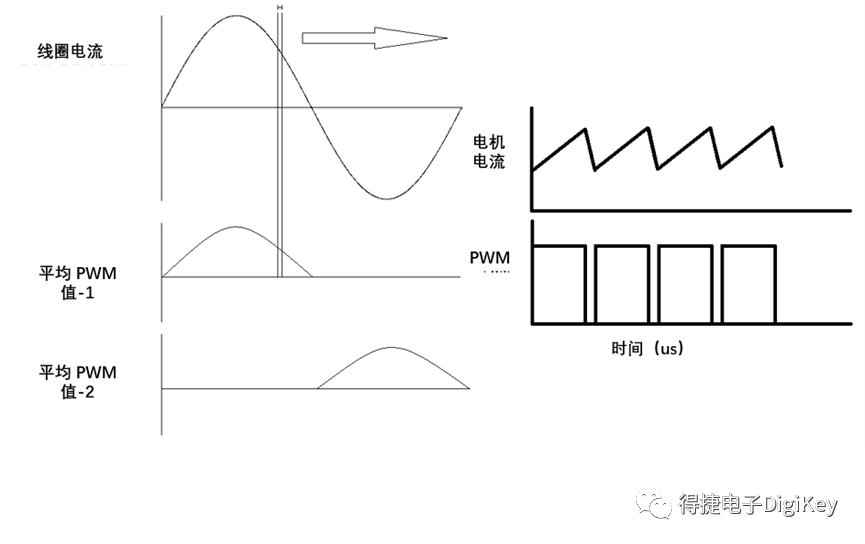 图11. 脉宽调制信号
图11. 脉宽调制信号
微步进包括向晶体管发送脉宽调制信号。这是一种控制电机线圈电流的简单方法。预先选择的PWM值被放置在正弦查找表中。典型地,选择20-40kHz的PWM频率。任何低于20千赫的声音,人类耳朵都能听到。频率保持低于40kHz以提高效率并减少晶体管中的功耗。当PWM信号为高时,电流流过晶体管。当PWM信号低时,电流流过二极管。这是一个非常粗糙的微步进实现,但它给出了它如何工作的一般概念。使用MOS管的电机驱动器可以控制电机电流降低或衰减的速度。驱动器的电流波形更像这样:
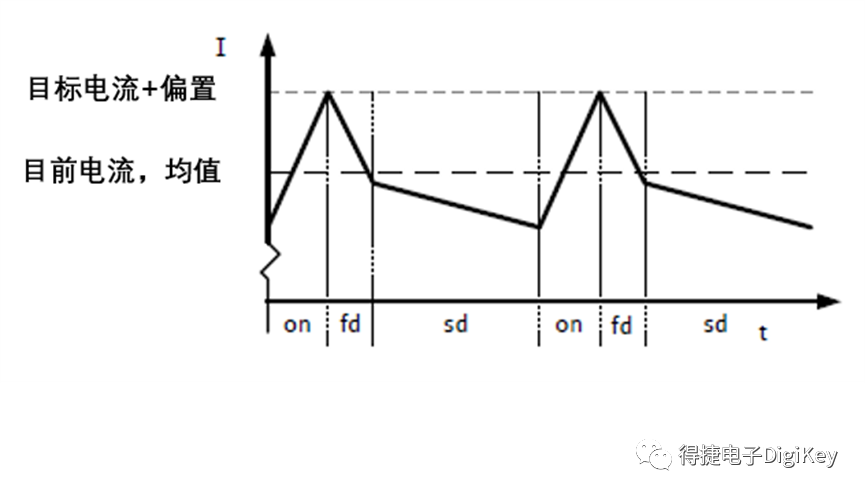 图 12. 流经MOS管电机驱动器的电流
图 12. 流经MOS管电机驱动器的电流
必须为其驱动的电机手动优化快速衰减周期和慢速衰减周期。一些新芯片会根据其感应到的电流自动调整衰减周期,但旧芯片可能需要优化(或调整)。
步进电机驱动实例
实例:使用控制板Arduino Mega控制步进电机驱动板TMC5130-EVAL来驱动步进电机。

图 13. 使用 Arduino Mega 控制步进电机驱动板 TMC5130-EVAL
控制器:Arduino Mega 2560是一款基于ATmega2560的微控制器板。它有54个数字输入/输出引脚(其中15个可以用作PWM输出)、16个模拟输入、4个UART(硬件串行端口)、一个16 MHz晶体振荡器、一个USB连接、一个电源插座、一个ICSP头和一个复位按钮。它包含支持微控制器所需的一切;只需用USB电缆将其连接到计算机,或用交流到直流适配器或电池为其供电即可开始使用。
步进电机驱动板:TMC5130是一个完全集成的步进电机驱动器和控制器系统,允许从任何微控制器远程控制步进电机。它在硬件上实现了所有实时关键任务。一旦配置,电机可以通过给出目标位置、命令归航序列或给出目标速度来驱动。使用TMC5130的好处包括:易于使用,使用256微步的电机精度,低电机噪声(无噪声隐藏斩波器),无传感器失速检测(stallGuard2),无阶跃损耗,dcStep和coolStep、UART或SPI控制接口的高效率,高电压范围,小形状因数,以及低部件数量。
1. 确保Arduino Mega与TMC5130-EVAL有电压匹配
如果Arduino是5V控制板,则必须将TMC5130-EVAL上的一个电阻从位置R3重新定位到R8。这将TMC5130的逻辑电平设置为+5V。
2. 连线
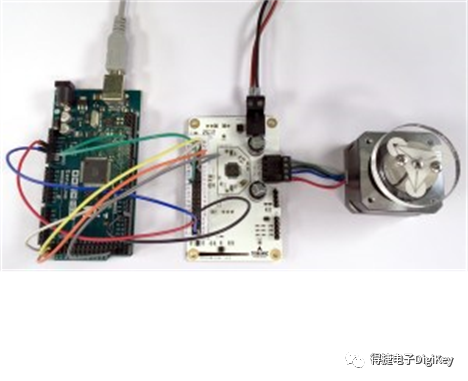 图 14. TMC5130与ArduinoMega 2560连接 (图片来源于Trinamic)
图 14. TMC5130与ArduinoMega 2560连接 (图片来源于Trinamic)
上图的电缆颜色
+5V - >红色
GND - >蓝色
SDO - >黄色
SDI - >橙色
SCK - >白色
CSN - >灰色
DRV_ENN - >黑色
CLK16 - >绿色
 图 15. 引脚对应的信号(图片来源于Trinamic)引脚对应的信号。在Arduino代码的注释部分记录了配置。
图 15. 引脚对应的信号(图片来源于Trinamic)引脚对应的信号。在Arduino代码的注释部分记录了配置。
ARDUINO代码
下面的Arduino代码不需要任何额外的库。SPI库是Arduino IDE附带的。该程序初始化TMC5130并执行简单的移动到位置周期。它将根据步进电机的接线将200全步进电机向一个方向旋转10转,向另一个方向旋转10转。请使用TMC5130数据表或TMCLIDE作为不同寄存器的参考。
向上滑动查看完整代码
#include
#include"TMC5130_registers.h"
/* The trinamic TMC5130 motorcontroller and driver operates through an
* SPI interface. Each datagram is sent to thedevice as an address byte
* followed by 4 data bytes. This is 40 bits (8bit address and 32 bit word).
* Each register is specified by a one byte(MSB) address: 0 for read, 1 for
* write. The MSB is transmitted first on therising edge of SCK.
*
* Arduino Pins Eval Board Pins
* 51 MOSI 32 SPI1_SDI
* 50 MISO 33 SPI1_SDO
* 52 SCK 31 SPI1_SCK
* 25 CS 30 SPI1_CSN
* 17 DIO 8 DIO0 (DRV_ENN)
* 11 DIO 23 CLK16
* GND 2 GND
* +5V 5 +5V
*/
int chipCS = 25;
const byte CLOCKOUT = 11;
// const byte CLOCKOUT = 9; --> Uncomment for UNO, Duemilanove,etc...
int enable = 17;
void setup() {
// put your setup code here, to run once:
pinMode(chipCS,OUTPUT);
pinMode(CLOCKOUT,OUTPUT);
pinMode(enable, OUTPUT);
digitalWrite(chipCS,HIGH);
digitalWrite(enable,LOW);
//set up Timer1
TCCR1A = bit (COM1A0); //toggle OC1A onCompare Match
TCCR1B = bit (WGM12) | bit (CS10); //CTC, noprescaling
OCR1A = 0; //output every cycle
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV8);
SPI.setDataMode(SPI_MODE3);
SPI.begin();
Serial.begin(9600);
sendData(0x80,0x00000000); //GCONF
sendData(0xEC,0x000101D5); //CHOPCONF: TOFF=5,HSTRT=5, HEND=3, TBL=2, CHM=0 (spreadcycle)
sendData(0x90,0x00070603); //IHOLD_IRUN:IHOLD=3, IRUN=10 (max.current), IHOLDDELAY=6
sendData(0x91,0x0000000A); //TPOWERDOWN=10
sendData(0xF0,0x00000000); // PWMCONF
//sendData(0xF0,0x000401C8); //PWM_CONF:AUTO=1, 2/1024 Fclk, Switch amp limit=200, grad=1
sendData(0xA4,0x000003E8); //A1=1000
sendData(0xA5,0x000186A0); //V1=100000
sendData(0xA6,0x0000C350); //AMAX=50000
sendData(0xA7,0x000186A0); //VMAX=100000
sendData(0xAA,0x00000578); //D1=1400
sendData(0xAB,0x0000000A); //VSTOP=10
sendData(0xA0,0x00000000); //RAMPMODE=0
sendData(0xA1,0x00000000); //XACTUAL=0
sendData(0xAD,0x00000000); //XTARGET=0
}
void loop()
{
// put your main code here, to run repeatedly:
sendData(0xAD,0x0007D000); //XTARGET=512000 |10 revolutions with micro step = 256
delay(20000);
sendData(0x21,0x00000000);
sendData(0xAD,0x00000000); //XTARGET=0
delay(20000);
sendData(0x21,0x00000000);
}
void sendData(unsigned long address,unsigned long datagram)
{
//TMC5130 takes 40 bit data: 8 address and 32data
delay(100);
uint8_t stat;
unsigned long i_datagram;
digitalWrite(chipCS,LOW);
delayMicroseconds(10);
stat = SPI.transfer(address);
i_datagram |= SPI.transfer((datagram >>24) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram >>16) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram >>8) & 0xff);
i_datagram <<= 8;
i_datagram |= SPI.transfer((datagram) &0xff);
digitalWrite(chipCS,HIGH);
Serial.print("Received: ");
PrintHex40(stat, i_datagram);
Serial.print(" ");
Serial.print(" from register: ");
Serial.println(address,HEX);
}
void PrintHex40(uint8_t stat, uint32_tdata) // prints 40-bit data in hex with leading zeroes
{
char tmp[16];
uint16_t LSB = data & 0xffff;
uint16_t MSB = data >> 16;
sprintf(tmp, "0x%.2X%.4X%.4X", stat,MSB, LSB);
Serial.print(tmp);
}
代码来源于:Trinamic 博客(关于代码的问题,可以去Trinamic博客上了解更多)
总结
希望这篇文章,可以帮助您了解步进电机的工作原理以及如何驱动步进电机。同时驱动步进电机的技术已经很成熟,善于利用现有的硬件和代码,才能事半功倍。
更多有关电机技术文章,请点击以下链接,也欢迎大家在文末留言讨论。
-
如何驱动步进电机
-
电机控制中的软启动(Soft Start)
-
一分钟读懂:与众不同的步进电机
-
步进电机每转步数和步进角
-
计算电机驱动器的功耗
小编的话
随着科学技术的发展,特别是永磁材料、半导体技术、计算机技术的发展,步进电机在众多领域得到了广泛应用,包括工业机器中的汽车仪表和机床自动化生产设备、机器人、安防摄像机、医用扫描仪、液压泵、呼吸机和血液分析仪,以及消费摄像机、商用机器及电脑周边等应用。您是否正在利用步进电机进行电机系统的设计?您在步进电机驱动过程中有哪些设计经验、心得或疑问?欢迎留言,分享和讨论!
秘技知识学不停 专属福利享不停
就等您加入!
点此登记
赚积分、换好礼
立即到「会员权益」查看您的礼遇! 如有任何问题,欢迎联系得捷电子DigiKey的客服团队中国(人民币)客服
 400-920-1199
400-920-1199 服务支持 > 联系客服 > 微信客服
服务支持 > 联系客服 > 微信客服 service.sh@digikey.com
service.sh@digikey.com QQ在线实时咨询:4009201199
QQ在线实时咨询:4009201199
中国(美金)/ 香港客服
400-882-4440
852-3104-0500 china.support@digikey.com
点击下方“阅读原文”查看更多
让我知道你在看哟
原文标题:聊一聊步进电机的几件事 还有彩蛋
文章出处:【微信公众号:得捷电子DigiKey】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 得捷电子
全部0条评论

快来发表一下你的评论吧 !
