

四足机器人的步态规划测试代码
描述
步态规划
因为我们的四足机器人足端,是在不停地与地面接触,悬空(摆动),所以这里说的步态规划,其实指的的一个连续(离散)时间上的接触序列。
我们以一条腿为例,本质上,可以看作是一个周期性的,用于生成各腿接触状态的阶跃函数。其输入值为时间,输出值为0或1,函数可以表示成如下:
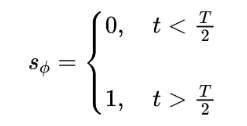
其中t=t%T为时间的周期函数,其图像如下所示。
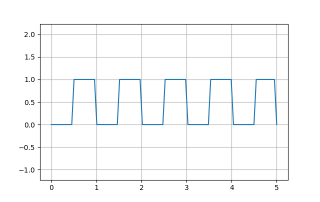
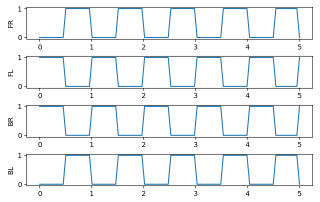
可以看出,步态规划器给出的是一段由0-1组成的接触序列。接下来加上相位关系。以tort步态为例,其相位为[0, 0.5, 0.5, 0],步态规划随时间的图像如下所示:
测试代码:
import numpy as np
import matplotlib.pyplot as plt
T = 1
t = np.linspace(0, 5, 100)
states = []
FR = []
FL = []
BR = []
BL = []
phi_offset = [FR, FL, BR, BL]
offset = [0, 0.5, 0.5, 0]
def step(t):
if t < 0.5*T:
state = 0
else:
state = 1
return state
def draw():
for time in t:
for i in range(len(offset)):
phi_offset[i].append(step((time+offset[i]) % T))
plt.subplot(411)
plt.ylabel('FR')
plt.plot(t, phi_offset[0])
plt.subplot(412)
plt.ylabel('FL')
plt.plot(t, phi_offset[1])
plt.subplot(413)
plt.ylabel('BR')
plt.plot(t, phi_offset[2])
plt.subplot(414)
plt.ylabel('BL')
plt.plot(t, phi_offset[3])
fig = plt.figure()
draw()
fig.tight_layout()
plt.show()
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
stm32红外六足机器人2014-03-27 0
-
【Embedded Pi申请】六足机器人的创新研发2015-11-25 0
-
什么是龙人四足机器人?2016-03-24 0
-
labview如何实现六足机器人的三足步态的编程程序2016-08-04 0
-
四足仿生机器人2016-08-19 0
-
【NUCLEO-F412ZG申请】六足仿生机器人2016-11-14 0
-
四足机器人2018-09-29 0
-
四足机器人的机构设计2021-09-15 0
-
如何完整的组装四足机器人?2021-09-24 0
-
基于静态平衡的四足机器人斜面步态规划张文宇2017-03-16 932
-
平面液压双足机器人步态规划及阻抗控制研究说明2020-01-17 1194
-
怎么样实现双足机器人参数化步态规划详细方法说明2020-03-23 1073
-
如何实现双足机器人爬楼梯的步态规划与参数优化2020-04-07 1585
-
腿+轮式动力!瑞士四足机器人展示最佳混合步态、运动更灵活2021-02-20 2471
-
四足机器人步态规划与接触状态2023-11-16 800
全部0条评论

快来发表一下你的评论吧 !
