

详解无人驾驶传感器:摄像头、激光雷达、雷达、温度传感器
电子说
描述
作者: Paul McLellan,Cadence楷登PCB及封装资源中心
本文将聚焦于无人驾驶车辆的关键部件之一——传感器。
在Cadence汽车峰会上,Uhnder的首席执行官Manju Hegde对传感器进行了精彩的概述,重点介绍了摄像头、雷达和激光雷达等核心传感器的部件。
传感器要求
Menju列出了关于传感器的十一个关键要求:
感应范围:应能充分适应车速。
视野(FoV):足够宽阔以展示全景视野。这里的一部分原因是由自动紧急制动规则——AEB 2018所驱动的,而由于2020和2022对视野的要求更高,要求车辆能够在交叉路口避免发生碰撞,因此现在需要更宽的FoV。
角度:角度检测和分辨率应满足检测相关特征的要求。这个问题在于雷达识别人类的能力相对较弱(雷达对玻璃纤维帆船的识别能力也相对较弱,所以人们在桅杆顶部设置了一个特殊的反射器)。
速度:测量并解析移动物体的速度。雷达可以做到这一点,但大多数激光雷达不能直接做到这一点,它们可以通过测量一段时间内帧与帧之间的差异来间接实现这点。
分类:雷达在这方面的能力比较欠缺。美国军方拥有每架敌方坦克和飞机的雷达标记,并采用了机器学习。雷达在探测范围内很难识别物体类型(树、行人、汽车等)。
颜色:颜色对交通信号灯来说尤为重要,部分色盲者只能在距离交通信号灯足够近的情况下通过亮灯的位置来进行判断。
信号处理用度:从获得原始传感器数据到得出“这是个小孩”或“这是一个消防栓”等结论,中间涉及大量的信号处理和图像分类工作。
运行:当所有照明灯(日间和夜间行车灯)打开时,或在恶劣天气中时,运行其全部功能面临着巨大的挑战。
恶劣天气:雨、雾、雪。即使是人类,在恶劣天气状况下也会遇到麻烦。
干扰:存在两种干扰类型,分别是环境干扰和其他传感器干扰。摄像头比人眼更容易因受到图像信号干扰而产生混乱。车上有多个雷达和激光雷达单元。雷达发出的信号通常随距离的平方而减弱,并且返回的反射波也会随距离的平方而减弱(从目标处开始计算),因此雷达的感应范围是距离的四次幂。因此,当一辆驶向我们的汽车在R2处充满雷达信号,而我们又正在R4对其进行探测时,就很容易因为干扰而产生混乱。再加上每辆车可能有4-6个雷达,产生的干扰就更大了。
成本:关于何时可运用无人驾驶汽车的预测,部分取决于成本。谷歌/Waymo可以制造几辆无人车在凤凰城行驶而不关心其成本,但降低传感器成本对批量生产至关重要。而降低成本最终还是需要依靠技术,才能将传感器运用到售价2万美元的汽车中。
传感器类别
三种传感器类别分别是视觉传感器(摄像头)、雷达和激光雷达。

视觉传感器:汽车所需的CMOS图像传感器(CIS)与消费性电子产品不同(消费性电子产品所需的CMOS图像传感器主要关注于制作好的Instagram图像)。汽车需要拥有高动态范围和更好的低光灵敏度的图像传感器,其应有更高的像素、更低的分辨率、更快的响应时间,并能同时满足在更高和更低温度下工作的性能需求(智能手机要适应口袋的温度,而汽车则需适应像沙漠和雪山那样的极端气候)。显而易见,摄像头有一个很大的缺陷:即与人类在夜间行车时一样,其视野受到车辆前照灯的限制。同时,摄像头需要一直保持清洁,这是另外一个问题。
激光雷达:现在市面上有大量不同类型的激光雷达(甚至比利用激光雷达的方式还多)。对于汽车而言,目前样车使用的是机械扫描激光雷达,但从长远来看,使用MEMS微振镜或光学相控阵的固态激光雷达是重点发展目标。激光雷达的运用存在一个小问题,即使用波长为850-940nm的近红外光雷达成本最低,但这种雷达会对眼睛造成伤害,且需要在有太阳光的环境中使用。波长为1550nm的雷达性能更高,这种雷达的许用能量比近红外光雷达高5个数量级(500,000倍而不是5倍),所需的太阳光比近红外光雷达低10倍,但是成本十分昂贵。其加分项在于角度分辨率很高,但在遇到反光性很差的物体和雾/雨/雪天气时也会出现问题;同时,清洁也是一个需要注意的问题。
雷达:目前所有的雷达都使用模拟FMCW(调频连续波)发送线性调频脉冲,这种脉冲与接收到的反射波混合,之后降低速度至基频带,再使用低通滤波器。有一个问题是,车上需要有多个雷达单元,但每次只能有一个雷达单元发射信号,因此有必要进行时分多路复用(基本上,每次只有一个信号绕每个雷达旋转)。
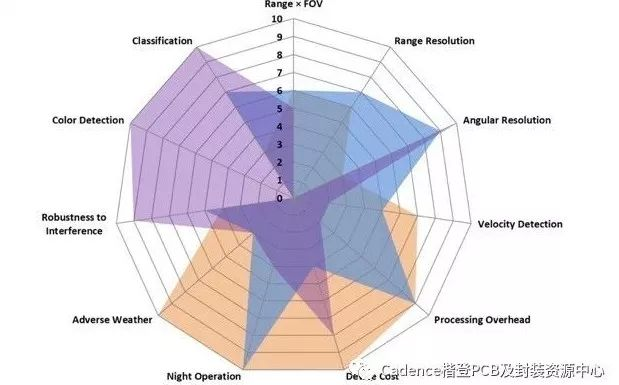
优势和不足
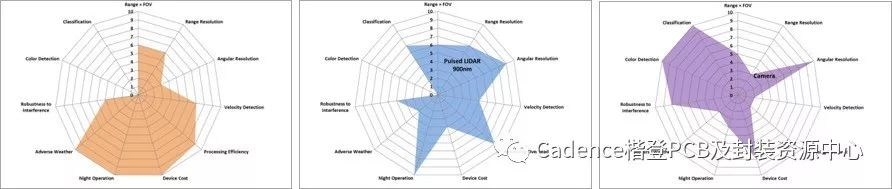
以上是各个传感器类型的蜘蛛图。左侧是雷达图,中间是激光雷达图,右侧是视觉传感器图。
这些传感器都很重要,因为如果我们同时使用这些传感器,那么一种传感器的优势就可以弥补另一种传感器的不足。雷达无法判断交通灯是红色还是绿色,但是视觉传感器可以;视觉传感器在大雾天看不清楚,但雷达可以;诸如此类……但是这些传感器离人们的需求仍有很大差距。
新一代雷达
“如果我们对雷达传感器进行改造会怎么样?今天的雷达都是为探测大型目标而设计的。现在,很多公司都在研究对雷达传感器进行改造这个问题。”Manju表示。
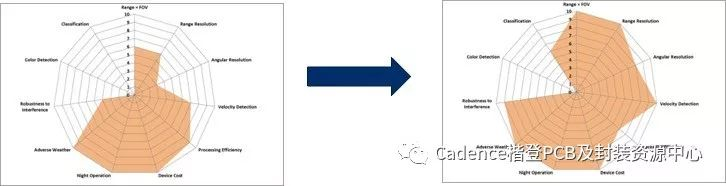
如果我们的雷达具有更大的感应范围,更高的分辨率(垂直和水平方向),非常灵敏的速度检测,更好的明暗目标比率和更强的抗干扰性,那么将对现在的雷达带来极大改变,如上面的蜘蛛图所示。
更重要的是,这将缩小与人类需求之间的差距。事实上,这些改造将大大缩小这一差距,从而使激光雷达具有边际价值。对于快速驾驶,车头仍然需要安装激光雷达,以检测道路上的障碍物(如一块木头);对于这类障碍物,雷达无法进行反射,而摄像头也无法及时检测。但是总体而言,所需的激光雷达数量会减少。
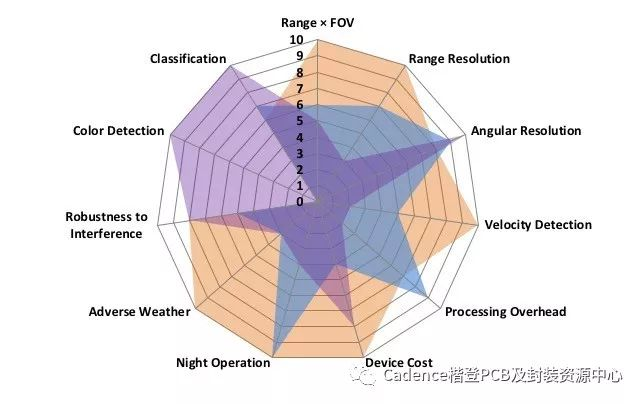
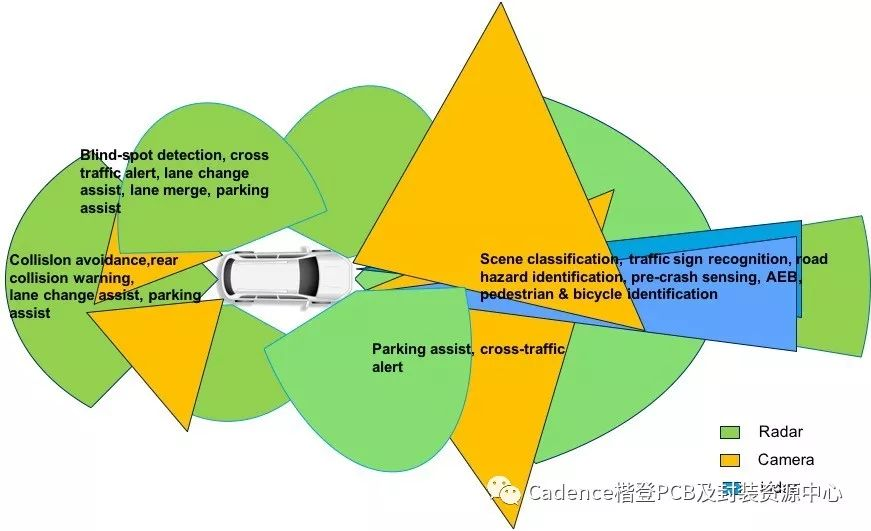
新一代雷达将是一个绝佳的解决方案:通过取消多个激光雷达,我们将从成本上获益。Menju的未来发展蓝图如下图所示(绿色部分代表Unhder正在开发的雷达):
温度传感器
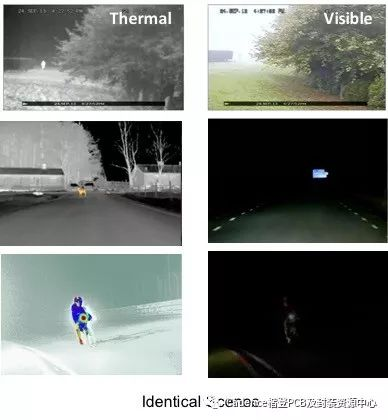
Owl Autonomous Imaging公司的Chuck Gershman提出了第四种传感器类型:温度传感器。其一大优势在于可以探测到活物,而且可以在白天和夜晚照常工作,还能应对各种天气状况。
仅仅使用激光雷达并不能满足我们的需求,激光雷达虽然能看到物体,但无法对此做出判断。此外,激光雷达的感应范围在恶劣天气下严重降低。特别是905nm的激光雷达,在雾和雨中会完全失去感应能力。猫头鹰公司已研发出一款焦平面阵列(FPA)双色探测器,并将其交付给空军使用。
正如Chuck在结束演讲时所说的:“我们的传感器能直接看到活人。”
《华尔街日报》关于传感器的报道

《华尔街日报》曾发表过一篇关于汽车传感器的文章:
“在低能见度条件下,包括在日落之后,摄像头在捕捉环境图像方面效果不佳。然而,激光雷达和雷达不受黑暗的影响,因为它们通过波长大于和小于可见光的各种电磁波收集有关环境的信息。”
其实,人眼也是如此工作的。我们通常通过在车辆前部放置高强度可见波长光源产生器,并查看其反馈回来的内容来解决这个问题。而这些光源产生器被称为前照灯。激光雷达和雷达并非由于所使用的波长而不受到黑暗的影响,而是因为它们已经做了类似的事情,发出电磁辐射脉冲,然后查看其反馈回来的内容。
引用一句话:
“滚珠轴承用于将传感器固定在汽车顶部,而在不平坦的路面上行驶会影响激光雷达的校准,并导致滚珠轴承过度磨损。车辆遇到这些情况的次数越多,激光雷达传感器需要更换的频率就越高。”
目前,放置于车顶上的大型旋转式激光雷达并未被真正提议作为进行商业批量生产的解决方案。它们的成本比汽车的其他部件都要高,这些只是实验平台。如上所述,若想进入经济上可行的商业生产,我们需要一个没有滚珠轴承和其他配件的固态激光雷达解决方案。

审核编辑 黄宇
-
速腾聚创激光雷达现在实现量产2017-08-21 0
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 0
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 0
-
无人驾驶硬件之传感器平台2017-09-30 0
-
激光雷达在无人驾驶技术中的应用解析2017-10-18 0
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 0
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 0
-
消费级激光雷达的起航2017-12-07 0
-
主流厂牌的毫米波雷达芯片有哪些?2019-09-16 0
-
几种传感器系统的主要特点、优劣势和技术的发展现状2020-05-18 0
-
介绍无人驾驶硬件平台设计2021-09-09 0
-
无人驾驶硬件系统主要包括哪些2021-09-09 0
-
无人驾驶技术中的激光雷达和摄像头都干些什么?2016-12-07 11633
-
无人车的眼睛:GPS重力传感器、摄像头与雷达传感器2018-07-16 4397
-
激光雷达传感器在无人驾驶中存在什么作用2020-03-24 7150
全部0条评论

快来发表一下你的评论吧 !
