

基于无人机高光谱遥感的城市水域水质监测与应用
电子说
描述
引言
河湖水环境监测是人类一直以来高度重视的问题。目前,传统水体污染监测仍是在“点”尺度上进行的,这种方法难以在宏观尺度上准确获取信息。相对于传统监测手段,卫星遥感技术有宏观、高效、经济等特点,对于获取长期、大范围河湖水环境的时空变化具有显著优势,在许多领域得到了广泛的应用。国内外学者利用卫星平台,对监测水域水质研究也取得了一定的成果。但此技术多应用于大面积水域的水质监测,且由于卫星遥感影像周期长,易受大气云层影响,对天气环境要求较高,不能及时监测水质参数浓度,了解水体污染情况。
与卫星遥感相比,无人机遥感技术具有灵活性高、响应迅速、可连续动态监测、时空分辨率高和空间变化特征明显等特点,在灾害救援、流域污染演变、生态环境监测等方面已有较多应用。
我国南方城市水域众多,经常出现因工地、工业园违规排水,汛期水土流失,管网错接、渗漏等原因造成的突发性水体污染。因此如何快速发现水体出现污染,精确定位污染源,对后续采取有效措施消除水体污染具有现实意义。本文利用无人机及定点架设设备搭载高光谱成像仪完成不同天气下实验水体光谱数据的采集,研究其浓度空间分布,对比光谱反演数据和实验室化学检测数据,分析天气对光谱反演数据精准度的影响,为后续该技术在水域的污染溯源,水环境保护及治理提供依据。
材料与方法
2.1 研究区与概况
茅洲河是深圳市第一大河,发源于深圳市石岩水库上游的羊台山,流经石岩、光明、公明、长安(属东莞市)、沙井等街道辖区,属于珠江水系;干流经深圳市与东莞市接壤,全长为41.61km,其中深圳境内长为31.29km。茅洲河流域位于深圳市西北部,总面积为388.23km2(包括石岩水库以上流域面积),其中深圳市境内流域面积为310.85km2。流域水系发达,两岸支流众多,深圳一侧共有支流60条,一级支流27条,其中光明区13条。
实验选取茅洲河(光明区段)一级支流玉田河、上下村排洪渠和新陂头河作为观测目标,所有水域水质均稳定达到地表Ⅴ类及以上。
2.2 采样点布设
2021年进行了2个阶段的外业数据采集工作(5月和11月),其中第1阶段为无人机高光谱监测,采样地点为玉田河、上下村排洪渠部分水域,监测时间1d,分析参数包括COD、TP、NH3-N,每条河均设3个采样点,采集水样数据共6个;第2阶段为定点架设高光谱监测,采样地点为新陂头河河口断面,在不同天气(多云、晴天、晴间多云、阴天、小雨)的情况下对同一点位连续监测15d,分析参数包括DO、CODMn、TP、TN、NH3-N,采集水样数据共59个。在利用高光谱成像设备采集数据的同时,对应监测点同步取水样送化验室检测,最后对比两者间的差异。第一阶段旨在展示水域水质变化趋势,快速锁定污染源,第二阶段旨在对高光谱成像技术监测水质的可靠性和准确性进行验证。
2.3 水质检测
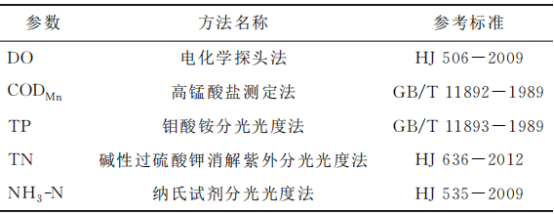
水体样本采样、保管和管理等相关流程参考行业标准《水质采样技术指导》(HJ494—2009),每个采样点取500mL表层0.2m左右处水样,装入样品瓶中进行密封,并放置于阴凉干燥处保存,水样采集完成后立即送至实验室进行水质参数化验测量,水质参数以及相应的检测方法见表1。
表1 水质参数及检测方法
2.4 数据获取
无人机飞行实验可采用大疆无人机M350RTK搭载由莱森光学自主研发的无人机高光谱成像系统iSpecHyper-VM100,获取河道及水库部分高光谱影像(如图1a所示)。所选实验时间均晴朗微风,无云层覆盖。定点监测实验采用固定架设设备搭载可见/近红外高光谱相机,水面上设漫反射率校准板作为水质监测配套定标板,获取新陂头河河口点位高光谱影像(如图1b所示)。进行连续15d以上的仪器可靠性试验,验证设备在多云、晴天、晴间多云、阴天、小雨等不同工况下的可靠性,对仪器在长期检测上的稳定性和适用性上进行全面评估。

图1 无人机高光谱成像系统和定点式监测系统示意
2.5 数据处理
高光谱数据处理软件,可将所采集的原始数据,经过光谱还原(导入光谱定标参数、进行辐射校正、图幅裁切)、靶标提取、几何校正、反射率计算、航带拼接(单架次)等一系列处理后,生成高光谱数据影像,并对架次间数据进行匀色及拼接,用于后续数据应用。高光谱水体多参数解析软件,即高光谱检测水质,将仪器测量的高光谱数据传输到计算机上,通过模型算法可以直接给出水质检测结果。该软件可实现影像查看、水体提取以及水质参数反演、结果统计及水质参数制图等功能,具体流程如图2所示。
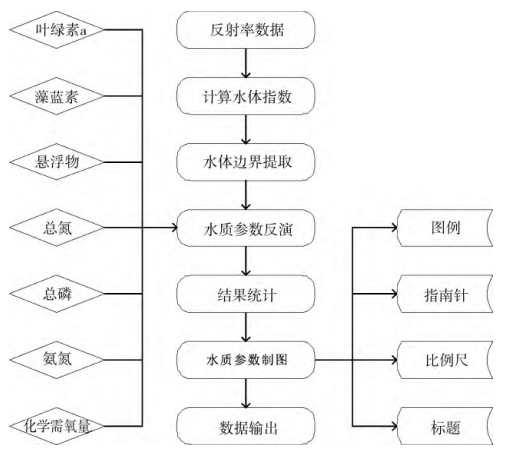
图2 无人机高光谱多参数解析软件流程示意
结果与分析
3.1 无人机监测水质参数图像反演
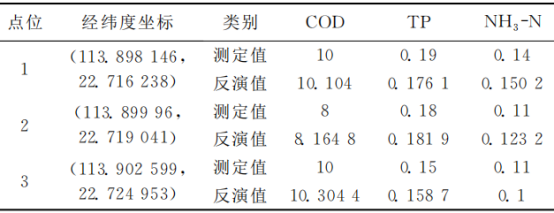
采用无人机搭载水质光谱仪现场飞行检测玉田河和上下村排洪渠水质,对模型进一步校准后,结合水质参数模型进行反演,计算高光谱图像各像元对应的水质参数,绘制COD、TP和NH3-N浓度空间分布图,河道水质参数浓度分布如图3和图4所示,可以清晰看出研究区横、纵向的水质分布情况,相同趋势关联度强。玉田河和上下村排洪渠水质稳定达标,同一参数值差别较小,仅河道边缘、桥两侧及河内植被附近存在污染物淤积或水生植被未及时捞出而死亡腐烂,释放有机细微碎屑进入水体,造成周边水质较差的情况,各水质参数反演的总体趋势符合实际情况。通过对比无人机采样点反演值和实验室检测化学值,对模型进行评估。结果见表2、表3所示,两条河道参数偏差度均在20%内。
3.1.1玉田河数据分析
COD浓度分布范围为3~19mg/L,基本在5~15mg/L区间;TP浓度分布范围为0.13~0.27mg/L,基本在0.16~0.24mg/L区间;NH3-N浓度分布范围为0.086~0.16mg/L,基本在0.1~0.14mg/L区间;水质地表Ⅳ类及以上。
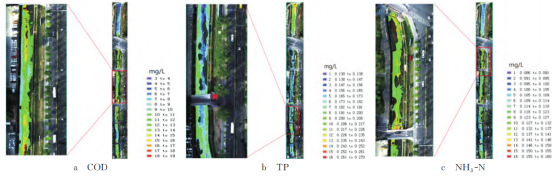
图3 玉田河水质参数浓度分布示意
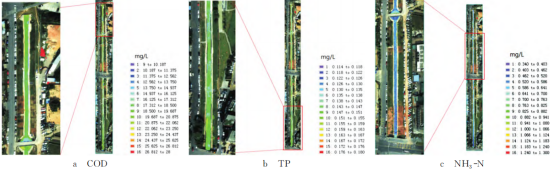
图4 上下村排洪渠水质参数浓度分布示意
3.1.2上下村排洪渠数据分析
COD浓度分布范围为9~28mg/L,基本在15~20mg/L区间;TP浓度分布范围为0.114~0.18mg/L,基本在0.13~0.16mg/L区间;NH3-N浓度分布范围为0.34~1.3mg/L,基本在0.46~0.76mg/L区间;水质地表Ⅳ类及以上。
3.2 定点监测水质参数验证
采用固定架设设备搭载高光谱成像仪定点监测新陂头河河口水质,同时对同片水域进行了水质采样检测。通过修正后的水质参数模型对监测中获取的高光谱图像各像元进行计算,依据位点的经纬度坐标,对相同位点的指标数值进行提取,各水样化学值和反演值的对比如图5所示。从图5中可看出,CODMN的两组数据趋势较为一致;DO和TN重合度较高;TP和NH3-N差异性最大,化学值普遍比反演值低。对反演的各水质数据进行Z检验,假设测量值与化学值之间存在紧密的联系。其中P(a)=0.091>0.05,假设显著,可以用测量值反映真实值;P(b)=P(c)=P(d)=P(e)=0,假设不显著,可能是样本数量较少及考虑此实验的真实性未剔除异常数据所导致。通过相对偏差度分析,CODMN
表2玉田河采样点水质化学值与反演值误差
3.3 多工况水质参数验证
在多云、晴天、晴间多云、阴天、小雨等天气工况下,对定点监测实验所采取水样的化学值及反演值进行误差分析。结果表明,不同天气各水样的反演值平均偏差相差不大,除总磷和氨氮外基本都控制在20%以内,属于可控范围。其中阴天和多云天气时,各水质指标偏差度较小。使用多变异图对不同工况参数是否影响测量系统稳定性进行分析(见图6),从图6中可以看出,天气对模型所反演出的化学指标偏差呈现无规则性,初步判定,普通天气对无人机高光谱仪监测水质无明显影响。
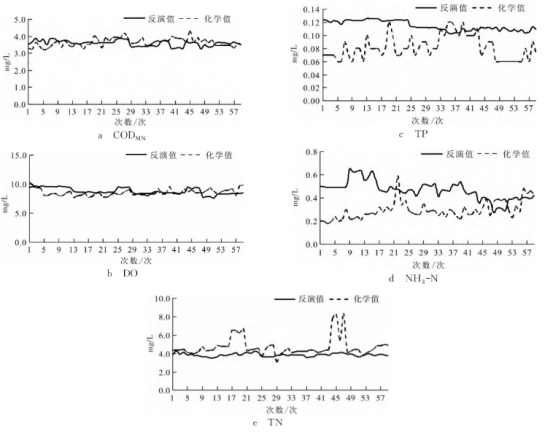
图5 新陂头河河口断面实测值和反演值对比示意
图6不同工况对河道水质影响情况示意
4、结论与讨论
1) 相较于传统水质监测手段,本文研究的无人机搭载高光谱仪进行水质监测,可减少人工巡查及实验检测过程,具有省时、省力、监测范围广等优点,通过模型在短时间内反演水质浓度空间分布图,更直观的体现水域水质状况,实现快速溯源、精准定位。2) 通过实验室检测数据及遥感反演数据对比,高光谱监测CODMN、DO和TN与化学检测法相比偏差度均在20%以内,基本可以直接替代使用;TP和NH3-N偏差度较大。原因是原建模数据来自早期的上海市河道,TP和NH3-N浓度普遍比深圳市河道高,本次建模为上海+深圳的数据,深圳采集数据量较少,导致反演结果存在偏差,若后续继续进行长时段水域监测,随着本地数据占比增大,模型精度会随之提升。
3) 根据现有数据初步判定,普通天气对无人机高光谱法监测水质无明显影响。由于本次实验时间较短,数据累积量小,各工况样品数量分布不均,不同天气对高光谱遥感设备的精度影响方面研究还需要进一步深入探讨
推荐:
无人机高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

审核编辑 黄宇
-
无人机遥感技术2016-03-11 0
-
水质监测仪有什么分类?2019-09-27 0
-
一文了解QY-16 浮标水质监测站 水质监测常规参数有哪些?2021-12-23 0
-
恒星物联 微型水质监测站 水质监测站2022-12-20 0
-
利用八轴无人机搭载光谱仪进行水质监测2021-02-04 2137
-
无人机水质遥感监测方法2022-03-03 3378
-
无人机高光谱在农田信息监测中的应用2022-04-24 2645
-
城市河道水质监测无人机高光谱技术应用研究-莱森光学2023-05-18 1664
-
基于无人机高光谱遥感的森林可燃物分类方法研究-莱森光学2023-06-02 807
-
高光谱相机无人机在城市绿化植被管理方面的应用2023-08-07 657
-
无人机低空高光谱遥感影像柑橘黄龙病植株监测模型探究2023-09-14 1084
-
基于无人机高光谱遥感的荒漠化草原地物分类研究2.02024-06-17 300
-
基于无人机遥感的作物长势监测研究进展2024-07-12 691
-
基于无人机高光谱遥感的河湖水环境探测2024-09-20 230
全部0条评论

快来发表一下你的评论吧 !
