

模拟IC之相位裕度和增益裕度
描述
在进行闭环系统设计的时候,首先就需要考虑系统的稳定性,而这个就会涉及到相位裕度的问题,确定零极点位置,仿真stb,得到loop gain和loop phase,一个极点会使得增益曲线以20d B/decade下降,两个极点则是40d B/decade,而有零点的话会减缓。一般这种系统都是负反馈系统。

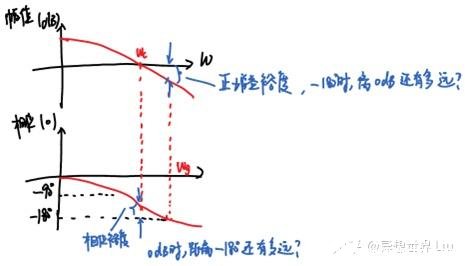
正常ADE仿真stb要保证相位裕度大于45度,可以保证系统稳定,一般都保证GBW内只有一个极点(即PM=90度。
相位裕度表明此时系统中的滞后有多大,这个负反馈是不是快要变成正反馈啦?在频率 Wc 处,相位再滞后PM,系统将达到临界稳定状态。
增益裕度也能体现系统的稳定性,增益裕度 Kg 为一个系数,若开环系统的增益增加该系数倍,则闭环系统达到稳定的临界状态
对于一个稳定的非最小相位系统,其相位裕度应为正,增益裕度 Kg 应大于1。当然,实际设计时,要保持足够的相位裕度和增益裕度。
审核编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开关电源设计中,相位裕度和瞬时响应的关系如何?2024-01-08 0
-
运放的稳定性相位裕度的关系?2024-04-01 0
-
请问相位裕度怎么看?2024-08-08 0
-
放大器的相位裕度和补偿电容问题2012-10-10 0
-
相位裕度2014-06-15 0
-
电容性负载和相位裕度2018-10-25 0
-
使用相位裕度分析放大器稳定性的方法2020-12-23 0
-
如何理解增益裕度这个概念?2021-06-24 0
-
运放相位裕度的认识与理解2017-11-22 51703
-
使用相位裕度分析放大器稳定性解决方案2020-12-28 6306
-
浅谈控制系统设计的波特图,相位裕度2021-05-03 9900
-
放大器相位裕度与威廉希尔官方网站 稳定性判断方法是什么2023-02-22 7744
-
密勒补偿电容补偿相位裕度的原理是什么?2023-09-18 2283
-
相位裕度是什么?相位裕度多少合适?2023-10-31 6425
全部0条评论

快来发表一下你的评论吧 !
