

行走的艺术 | 人形机器人:姿态篇
描述
在人形机器人的设计中,行动姿态的精准控制是实现高效、安全行走的关键。特别是在夜间室内和复杂的野外,机器人的行走不仅需要稳健,更要细心。多模态感知系统作为人形机器人姿态控制的关键技术之一,极大地提升了机器人的性能,使其能够在复杂多变的环境中安全、有效地工作。随着技术的不断进步,多模态感知系统将在未来的人形机器人中扮演越来越重要的角色。
建立多模态感知系统
人形机器人的多模态感知系统,需要结合视觉、听觉、嗅觉、触觉、材质感知、压力感知等多种“感官”,使其获得立体而全面的环境认知。该系统与AI算法相结合,迅速处理来自传感器的海量数据,形成机器人的“直觉”,使机器人能在瞬间作出科学合理的行走姿态决策,从而适应各种环境,且能在复杂多变的情况下保持稳健和灵活,无论是避开障碍还是规划最佳路径,都能轻松应对。
夜间室内行走的“魔法”:超声波材质识别技术
设想一个场景,人形机器人在夜间的室内环境中执行安保任务。由于室内可能铺设有各种不同的地面材质,如木地板、瓷砖或地毯,机器人需要能够识别这些材质以避免损坏。如果它的足部装配了超声波材质识别传感器,利用回波检测技术,便能够快速而准确地识别出地面的材质。结合机器人的主机算法,人形机器人能够建立多模式并行的行走体系,无论是轻盈地在室内行走,还是稳健地踏过崎岖的野外山海。
接下来,让我们将视野拓宽到更为复杂的地形。想象机器人穿越沙地或冰面,这些地面与坚硬的水泥地截然不同,行走其上,人类容易失去平衡。但人形机器人,作为人类生产生活的得力助手,它的设计必须克服这些挑战。超声波材质识别传感器在这些特殊环境中发挥着至关重要的作用。当机器人的脚步落在沙地或冰面上,传感器立即将信息传输到中央控制系统,机器人随即根据地面材质的特性,智能调节各处关节的力矩,巧妙地保持身躯的平衡。这样,无论是辅助人类还是与动物一起,机器人都能安全地穿越那些难以行走的地方,展现出其作为智能伙伴的真正价值。
脚底下的“智慧”:柔性压力传感技术
在户外探险中,人形机器人可能需要独立或协助人类穿越森林、湿地等特殊地形地貌。野外的地面条件复杂多变,仅仅依靠视觉感知难以准确判断地面情况。如在机器人的脚底板上安装柔性压力传感器,能够使其精准探测出脚底板所受的压力,从而判断地面的软硬度。当机器人遇到沼泽地时,柔性压力传感器能够立即识别出异常,并通过预警系统提醒人类同伴避免潜在的危险。
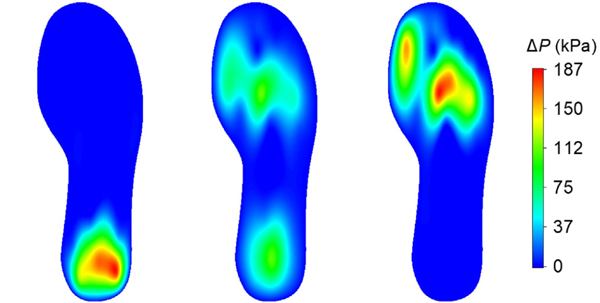
请暂且将视角转向真人模仿实验,实验者的脚底安装了五个柔性压力传感器。随着实验者行走,每一步的微妙力量变化都被这些传感器逐一捕捉。如实验成果印力图呈现,可以看到从脚跟到脚尖,每一个区域所承受的压力。设想一下,如在人形机器人的脚底板上安装这款柔性压力传感器,那么机器人就能随时感知到脚底各个区域的压力分布情况,它能够以前所未有的细致度感知地面的每一次接触,再结合超声波材质识别技术,机器人就能够更加精准地调整自己的行走姿态,无论是在坚硬的大理石上,还是在柔软的沙滩上,都能自在、自如。
-
机器人姿态监控2012-02-11 0
-
四足步行机器人的弯道行走2012-08-12 0
-
倒下后能自立的行走机器人:可避障导航搬货物2016-02-25 0
-
为什么人形机器人更讨人喜欢?2016-05-12 0
-
【开发教程1】人形街舞机器人-套件检测教程2022-04-22 0
-
自制一个单独行走的机器人2022-07-13 0
-
【教程1】人形街舞机器人-套件检测教程2022-08-12 0
-
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评2023-12-20 0
-
如何使用CPGs实现双足机器人的行走规划与控制2020-03-17 1266
-
多家机器人企业布局“机器人造机器人”产线2023-05-05 1351
-
认清人形机器人的内在价值2023-09-08 963
-
2024年人形机器人产业的九大要点2024-01-22 1128
-
海尔与乐聚联手推出人形机器人“夸父”2024-03-19 1062
-
未来之声 | 人形机器人说话篇:无声!2024-04-13 291
-
人形机器人场景应用联盟正式成立2024-08-19 700
全部0条评论

快来发表一下你的评论吧 !
