
资料下载


×
移动机器人路径识别系统
消耗积分:2 |
格式:rar |
大小:4.04 MB |
2018-01-18
分享资料个
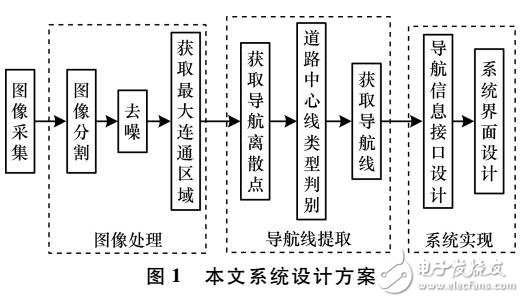
为实现果园移动机器人导航信息的获取与实时显示,提出一种道路中心线类型的判别方法,并设计一种果园路径识别系统。通过对十六色相环在HSV颜色空间下H分量的分析,确定图像二值化阈值。针对处理完成的二值图,采用行扫描点检测算法获得道路中心离散点并用直线进行拟合,以直线和弯曲道路图为样本,分析离散点至拟合直线距离的均值方差分布,确定果园道路中心线类型判别条件,根据判别结果拟合果园道路中心线。为实现系统可视化,采用Matlab与VB混合编程技术将导航信息实时显示在VB设计的系统界面中。实验结果表明,与采用垂直投影法的Matlab-GUI视觉导航系统相比,该系统导航信息更新速度较快,道路识别成功率较高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





