
资料下载


×
飞机外仓清洁机器人的设计
消耗积分:3 |
格式:rar |
大小:2.98 MB |
2018-01-30
分享资料个
目前飞机表面的清洁T作仍主要采用人工式的清洁方法,或者采用大型清洁车进行喷洒清洗,存在装置体积庞大,使用、安装等相对比较复杂,实用性不强,造成了整体清洁的运动不灵活,危险系数高等缺点。将清洁机器人装置做得简单、运动灵巧,能适用于大部分飞机主翼、机身以及尾翼的清洁使用是关键。因此本文设计了一款以STM32单片机为核心控制器的飞机外仓清洁机器人来满足需要。
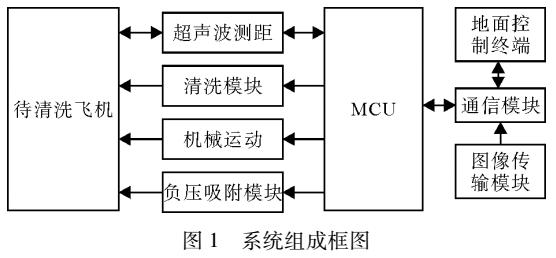
本设计方案以STM32单片机为核心控制器,通过负压吸附模块吸附在飞机表面;通过机械运动模块在飞机表面的运动;通信模块实现地面控制终端对机器人的控制,并将机身的清洁情况以及伤痕通过摄像头传给机务人员。超声波避障模块实现机器人行进过程中有效避障;清洁模块实现对飞机外仓表面的有效清洁。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






