

介绍下使用 OpenCV 的三个基本功能以及噪声的类型分析与处理
电子说
描述
总结学习下图像处理方面基础知识。
这是第一篇,简单的介绍下使用 OpenCV 的三个基本功能:
• 图像的读取• 图像的显示• 访问图像的像素值
然后概述下图像噪声的类型,并为图像添加两种常见的噪声:高斯噪声和椒盐噪声。最后,使用中值滤波和均值滤波来处理带有噪声的图像。
OpenCV 基础
在 OpenCV 中,完成图像的输入输出以及显示,只需要以下几个函数:
1. namedWindow
创建一个可以通过其名字引用的窗口。第一个参数,设置窗口的 name,可以通过name引用该窗口;第二个参数,设置窗口的大小。有以下几个选择:
• WINDOW_NORMAL or WINDOW_AUTOSIZE 调整窗口的大小以适应图像,不同的是,使用WINDOW_NORMAL可以手动调整窗口的大小;WINDOW_AUTOSIZE不能调整窗口的大小。• WINDOW_FREERATIO or WINDOW_KEEPRATIO 改变窗口时是否会保持图像的ratio不变,没发现这俩有什么区别。
2. imshow
显示图像
3. imread
读取图像数据到Mat中,第一个参数是图像的文件名;第二个参数是标志,标识怎么处理图像的色彩。常用的几个选项:
• IMREAD_UNCHANGED 和原图像保持一直不变• IMREAD_GRAYSCALE 将图像转换为单通道的灰度图• IMREAD_COLOR 将图像转换为3通道的BGR,默认选项• IMREAD_REDUCED_GRAYSCALE_2 IMREAD_REDUCED_GRAYSCALE_4 IMREAD_REDUCED_GRAYSCALE_8 单通道灰度图读入图像,并减小图像的大小。减小的值为1/2,1/4,1/8• IMREAD_REDUCED_COLOR_2 IMREAD_REDUCED_COLOR_4 IMREAD_REDUCED_COLOR_2 3通道BGR读入图像,并减小图像的大小。减小的值为1/2,1/4,1/8
4. Mat
Mat 是 OpenCV 中最重要的数据结构,在做图像处理时基本都是对该结构体的操作。
Mat 由两部分构成:矩阵头和矩阵数据,矩阵头较小,创建的每个 Mat 实例都拥有一个矩阵头,而矩阵数据通常占有较大的空间,OpenCV 中通过引用计数来管理这部分内存空间,当调用赋值运算符和拷贝构造函数时,并不会只复制矩阵头,并不会复制矩阵数据,只是将其的引用计数加1。例如:
上面代码中的 a,b 和 m 各自拥有自己的矩阵头,其引用的数据却指向同一份。也就是说,修改了其中任意一个,都会影响到其余的两个。
要想复制矩阵数据,可以调用 clone 和 copyTo 这两个函数
将图像读入到 Mat 后,有三种方式访问 Mat 中的数据:
• 通过指针• 使用迭代器• 调用 at
图像噪声
图像噪声是图像在获取或传输的过程中受到随机信号的干扰,在图像上出现的一些随机的、离散的、孤立的像素点,这些点会干扰人眼对图像信息的分析。图像的噪声通常是比较复杂的,很多时候将其看成是多维随机过程,因而可以借助于随即过程描述噪声,即使用概率分布函数和概率密度函数。
图像的噪声很多,性质也千差万别, 可以通过不同的方法给噪声分类。
按照产生的原因:
• 外部噪声• 内部噪声
这种分类方法,有助于理解噪声产生的源头,但对于降噪算法只能起到原理上的帮组。
噪声和图像信号的关系,可以分为:
• 加性噪声,加性噪声和图像信号强度不相关,这类噪声可以看着理想无噪声图像f和噪声的和。• 乘性噪声,乘性噪声和图像信号是相关的,往往随图像信号的变化而变化
而为了分析处理的方便,常常将乘性噪声近似认为是加性噪声,而且总是假定信号和噪声是互相独立的。
最重要的来了,按照概率密度函数(PDF)分类:
• 高斯噪声,高斯噪声模型经常被用于实践中。• 脉冲噪声(椒盐噪声),图像上一个个点,也可称为散粒和尖峰噪声。• 伽马噪声• 瑞利噪声• 指数分布噪声• 均匀分布噪声
这种分类方法,引入了数学模型,对设计过滤算法比较有帮助。
给图像添加噪声
按照指定的噪声类型,生成一个随机数,然后将这个随机数加到源像素值上,并将得到的值所放到[0,255]区间即可。
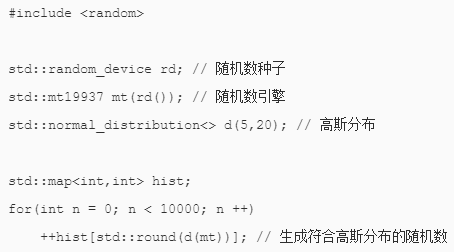
C++11 随机数发生器
新的随机数生成器被抽象成了两个部分:随机数生成引擎和要生成的随机数符合的分布。
随机数引擎有三种:
• linear_congruential_engine 线性同余算法• mersenne_twister_engine 梅森旋转算法• subtract_with_carry_engine 带进位的线性同余算法
第一种最常用,而且速度比较快;第二种号称最好的伪随机数生成器
添加图像噪声
使用C++的随机数发生器为图像添加两种噪声:椒盐噪声和高斯噪声。椒盐噪声是图像中离散分布的白点或者黑点,其代码如下:
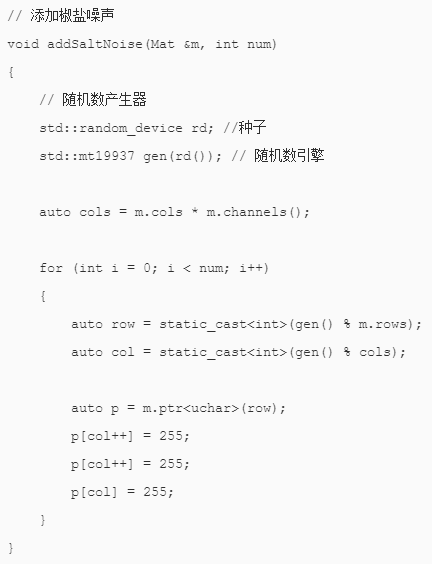
上述代码中使用ptr()获取图像某一行的行首指针,得到行首指针后就可以任意的访问改行的像素值。
高斯噪声是一种加性噪声,为图像添加高斯噪声的代码如下:
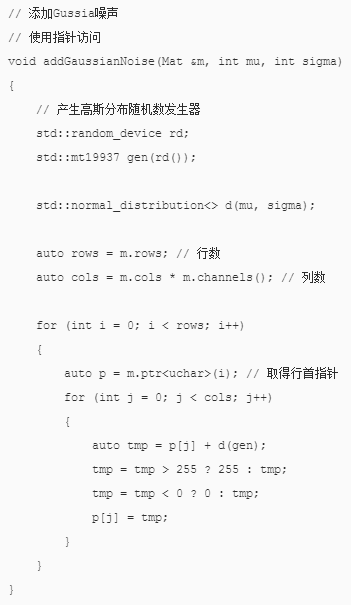
随机产生符合高斯分布的随机数,然后将该值和图像原有的像素值相加,并将得到的和压缩到[0,255]区间内。
左边是原图,中间的是添加高斯噪声后的图像,最右边的是添加椒盐噪声后的图像。
使用滤波器去除噪声
根据噪声类型的不同,选择不同的滤波器过滤掉噪声。通常,对于椒盐噪声,选择中值滤波器(Median Filter),在去掉噪声的同时,不会模糊图像;对于高斯噪声,选择均值滤波器(Mean Filter),能够去掉噪声,但会对图像造成一定的模糊。
在 OpenCV 中,对应于均值滤波器的函数是 blur,该函数需要5个参数,通常只设置前3个后两个使用默认值即可。blur(m, m2, Size(5, 5));第一个参数是输入的图像,第二个参数是输出的图像,第三个参数是滤波器的大小,这里使用的是5×55×5的矩形。
对应于中值滤波器的函数是medianBlur(m1, m3, 5);前两个参数是输入输出的图像,第三个参数是滤波器的大小,由于是选取的是中值,滤波器的大小通常是一个奇数。
下图是对有噪声图像使用滤波器后的结果,中间的是原始图像,左边的是使用均值滤波器过滤高斯噪声后的结果;右边的是使用中值滤波器过滤椒盐噪声后的结果。可以明显的看出,这两种滤波器都能够很好的去掉图像的噪声,但会对图像造成一定的模糊,尤其是均值滤波器造成的模糊比较明显。
总结
本文算是第一篇文章,简单的介绍下 OpenCV 的基本使用;接着访问图像中的像素,并借助于C++11的随机数库,为图像添加高斯噪声和椒盐噪声;最后使用中值滤波器和均值滤波器除去图像,并对结果进行了对比。
-
【NUCLEO-F412ZG试用体验】迟来的开箱及基本功能介绍2017-01-01 0
-
物联网的最基本功能是什么?2020-06-16 0
-
BMS的基本功能和硬件拓扑2020-12-16 0
-
MCU的基本功能及程序编写2021-01-12 0
-
MCU的基本功能和程序编写2021-01-14 0
-
MCU的基本功能2021-02-05 0
-
MCU的基本功能有哪些呢2021-11-03 0
-
STM32CUBEMX基本功能如何配置?2021-11-23 0
-
串口的基本配置和基本功能是什么?2021-12-10 0
-
reertos基本功能包括什么2021-12-27 0
-
RTOS具有的基本功能有哪些2022-01-06 0
-
介绍一下解决USART通信的最基本功能实现的编程思路2022-01-20 0
-
介绍操作系统的基本功能以及UCOSII的移植方法2022-02-18 0
-
自动发电控制系统具有三个基本功能2024-10-03 537
全部0条评论

快来发表一下你的评论吧 !
