

安泰功率放大器应用:驱动超声波作动器
描述
机器人具有轮式、足式、蛇形、爬行、飞行、游动等丰富的运动形式(图1)。在目前的研究中,机器人空中与水中的运动通常采用飞行与游动方式,陆上运动则以轮式、足式、蛇形、爬行等方式为主。相较于蛇形、爬行等复杂运动,轮式、足式和轮足式机器人的运动机理清晰,更便于机器人的设计与操控,相关研究成果也较为丰富。驱动腿足、腿轮可有效增加机器人牵引力和负载力,同时使机器人更加适应崎岖及不平坦路面环境。那么功率放大器能驱动超声波作动器吗?
▍“驱动器+腿足执行器”vs超声驱动行波作动器
传统多足机器人以“驱动器+腿足执行器”形成足结构,驱动足会增大机器人系统的体积,基于仿生运动实现多足协同运动的控制难度、系统集成难度和设计成本也随之增大。
针对这一问题,受多足虫“多足+爬行”运动方式的启发,山东大学智能无人系统教育部工程研究中心吴疆副研究员以超声行波驱动为基础,研发了一种具有高负载和牵引能力的仿生超声驱动行波作动器,该研究成果以 Development of a Self-Moving Ultrasonic Actuator With High Carrying/Towing Capability Driven by Longitudinal Traveling Wave 为题刊登在 IEEE/ASME TRANSACTIONS ON MECHATRONICS。
如图2(a)所示,作动器振动体设计有多个仿虫足矩形齿槽,以实现作动器构型与运动仿生,图2(b)与图2(c)展示了作动器运动特点与仿生思路,其最终构型如图2(d)所示。作动器的尺寸长×宽×高为315mm×32mm×30mm,在频率和峰值分别为27.8kHz和800V的交流电压驱动下,负载能力可达6kg,是其自身重量的10.2倍,牵引能力可达24.5N,具有41.5N/kg的牵引力密度,运动性能优于现阶段多数研究成果。得益于“多足+爬行”仿生设计,作动器在一定程度上继承了生物体对各种路面环境的适应能力,可穿过30mm的“宽沟”,并在不同材质的“路面”上展现出较为理想的运动性能。此外,作动器采用超声纵向行波驱动,可在无负载时达到65.8mm/s的运动速度。

图2超声作动器的设计仿真与构型视图
▍为什么是纵向行波激励?
超声作动器振动传播类型包括驻波和行波。通过激发弯振或纵振形成驻波同样可达到驱动作动器沿一定轨迹运动的目的,这种方式在超声作动器和超声电机中经常使用。图3展示了驻波方式驱动的多种超声电机与超声作动器。然而在驻波振动下,模态简并使得系统的高度和长度难以大幅度改变,振动体结构复杂,在需要精确制造和安装的场景下此方法极为受限。
以弯曲行波形成板状超声作动器是另一种常见的传统作动器设计方法。相较于驻波,弯曲行波很容易在结构中被激发,但它们的机电耦合比纵向振动的行波作动器机电耦合弱,因此,采用夹持式换能器激励的纵向行波作动器有利于实现良好的承载/牵引性能。
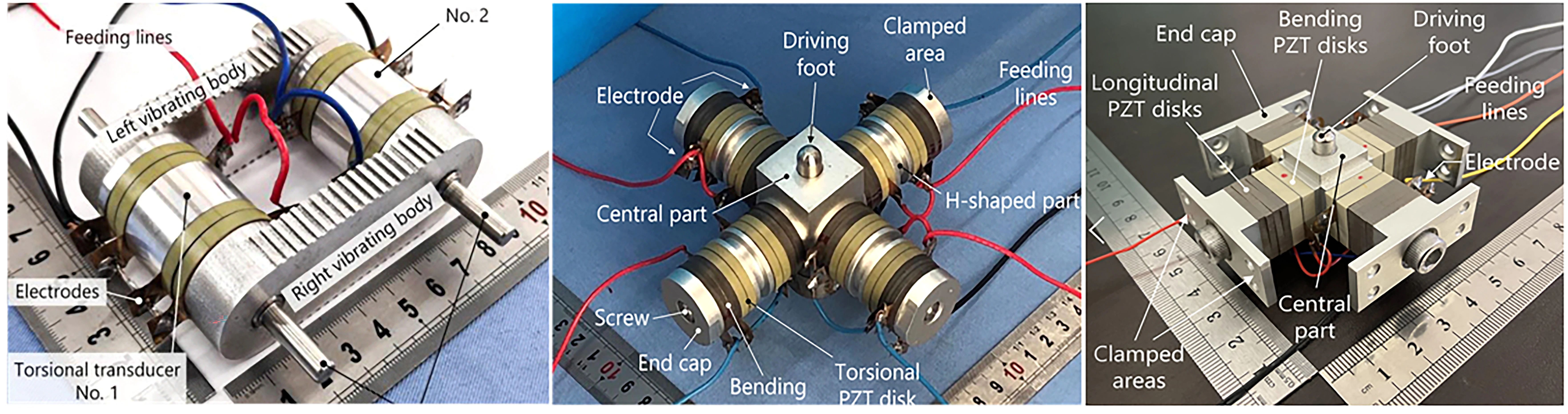
图3驻波驱动的超声电机与超声作动器
▍行波驱动,多足协同
在纵向行波振动下,作动器中形成沿振动体方向并受两端纵振换能器相位影响的“多足”协同爬行运动。在纵向行波影响下,每个“足端”作近似椭圆运动,其运动轨迹受结构的影响并在轨迹趋向圆形时获得更优的承载/牵引能力。与此同时,“多足”在纵向行波影响下协同运动,可带动作动器沿某个设定方向爬行。为了提高作动器的运动速度和负载性能,研究人员建立了如图4所示的超声作动器组端运动模型,最终实现作动器“行波驱动、多足协同”的仿生运动形态。
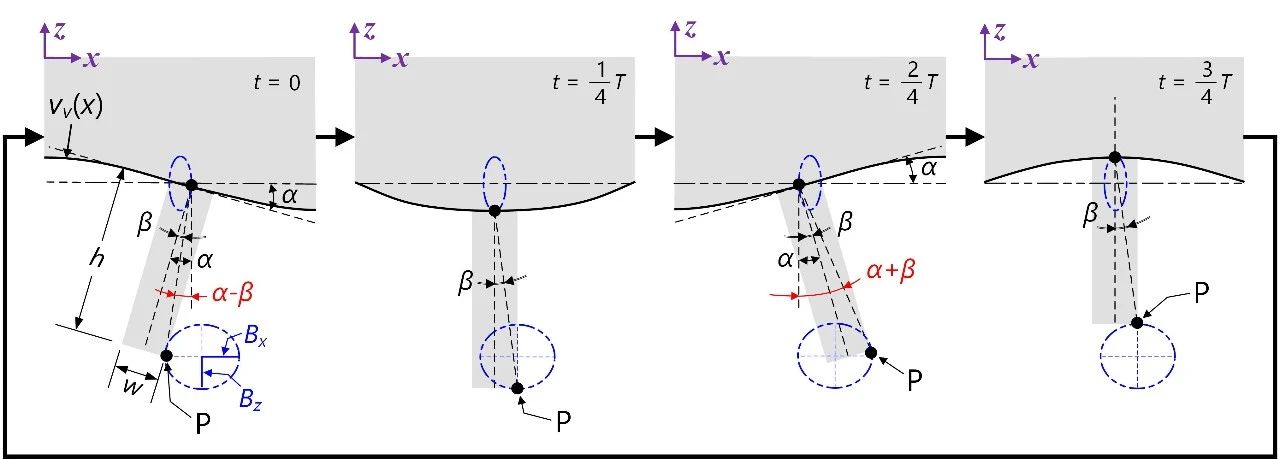
图4超声驱动行波作动器足端运动模型
图5展示了超声驱动行波作动器的运动过程。在作动器控制方面,超声驱动行波作动器可通过调节频率、相位设计与电压,简便地实现驱动器运动速度和运动方向的控制。
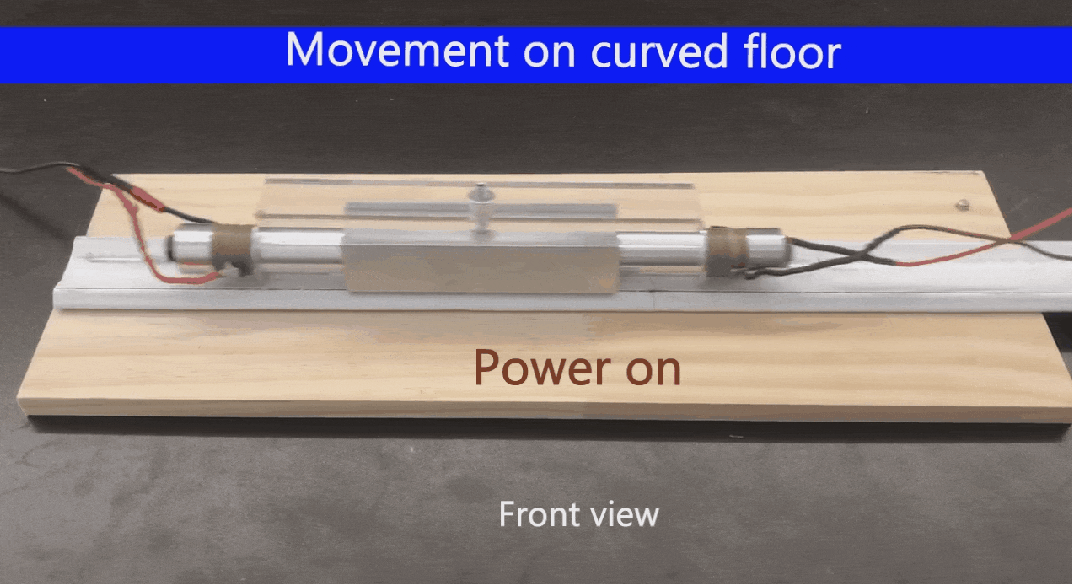
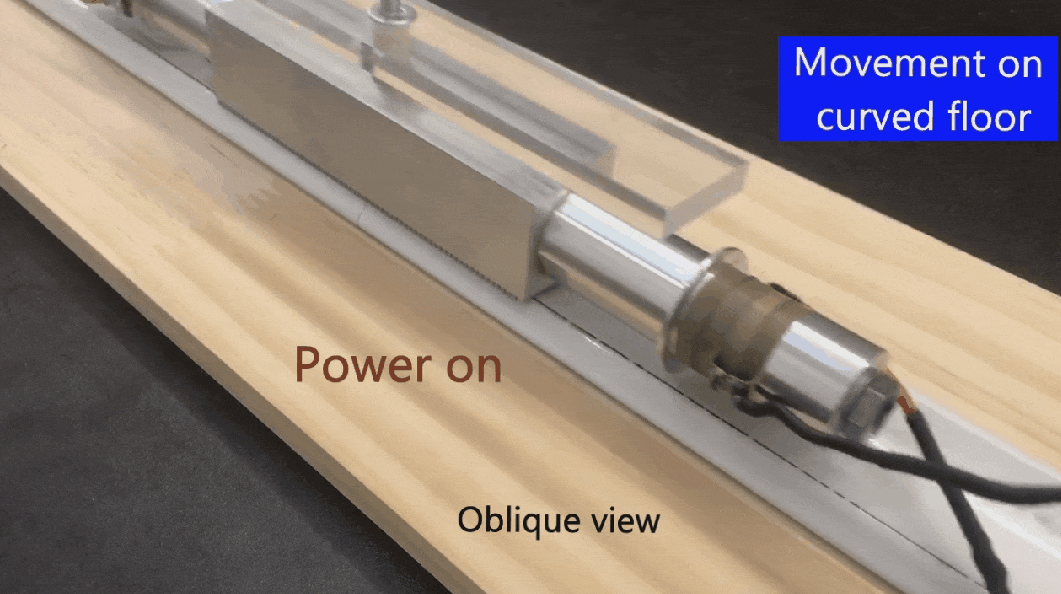
图5超声驱动行波作动器的运动过程
研究人员分别在木板和大理石材质模拟的路况下,对作动器速度进行了阶跃响应测试。如图6所示,在测试条件下,作动器在2种材质表面变现出的最大运动误差不超过8%,体现了作动器良好的运动能力。
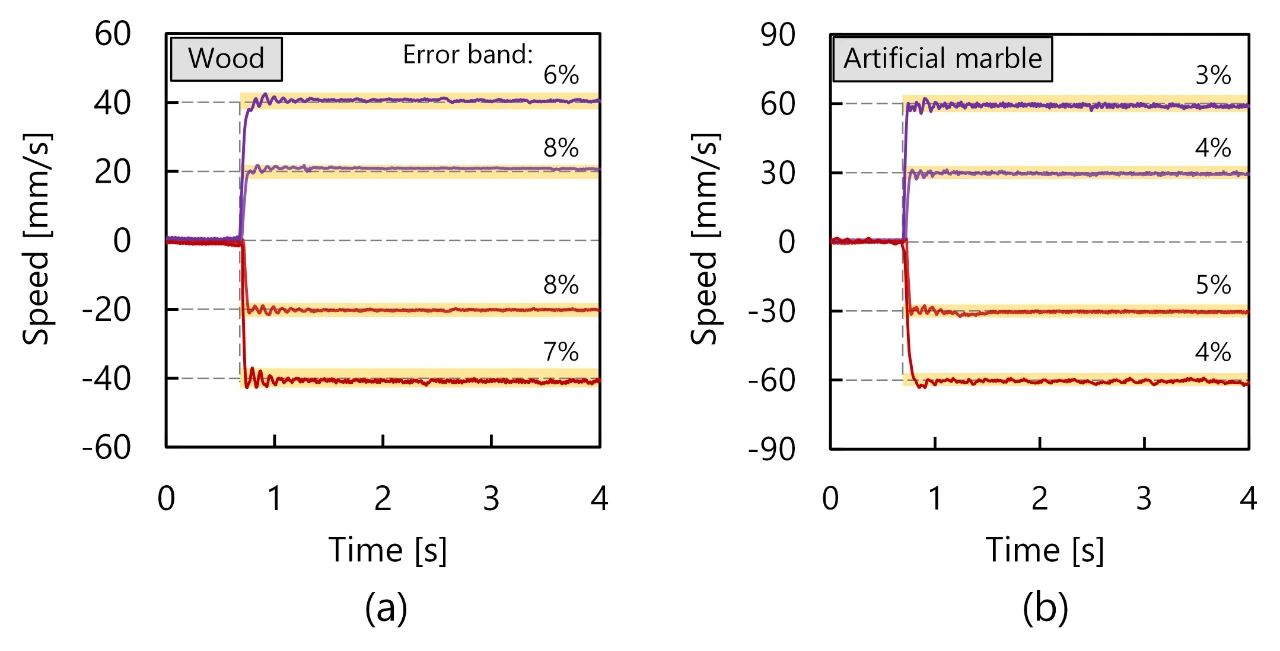
图6超声驱动行波作动器的速度阶跃响应曲线
图7展示了作动器对0.5~1Hz频率动态变化速度信号的跟踪效果,跟踪误差不超过7%,体现了作动器良好的动态响应能力。
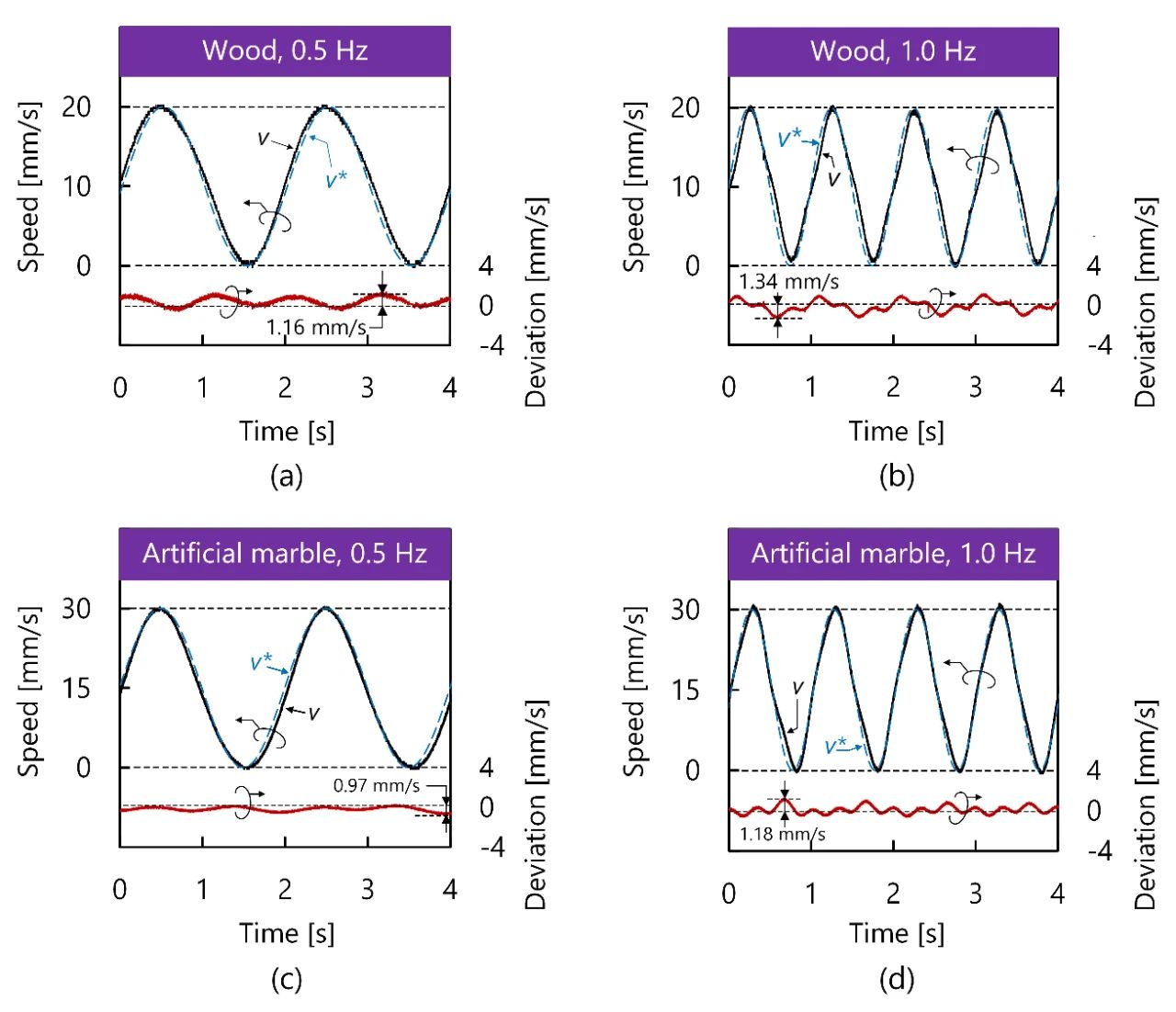
图7超声驱动行波作动器的速度动态响应曲线
如图8所示,由于多足结构增加了作动器与地面的接触“机会”,超声驱动行波作动器可跨越30mm的距离,增加了作动器对复杂地面的适应能力,拓展了作动器的应用场景。
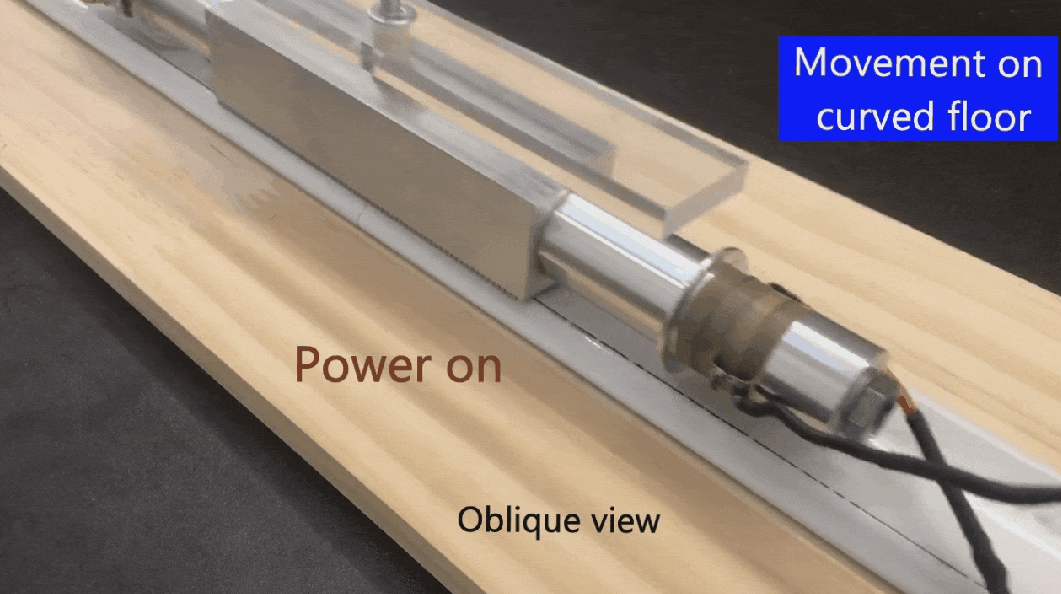
图8超声驱动行波作动器跨越宽沟的运动过程
ATA-68020功率放大器

ATA-68020是一款理想的单通道功率放大器。最大输出850Vp-p(±425Vp)电压,最大输出电流2.12Ap,可与主流的信号发生器配套使用,实现信号的完美放大,同时它也是一款在超声电机超声制动器驱动中常用到的测试仪器仪表。
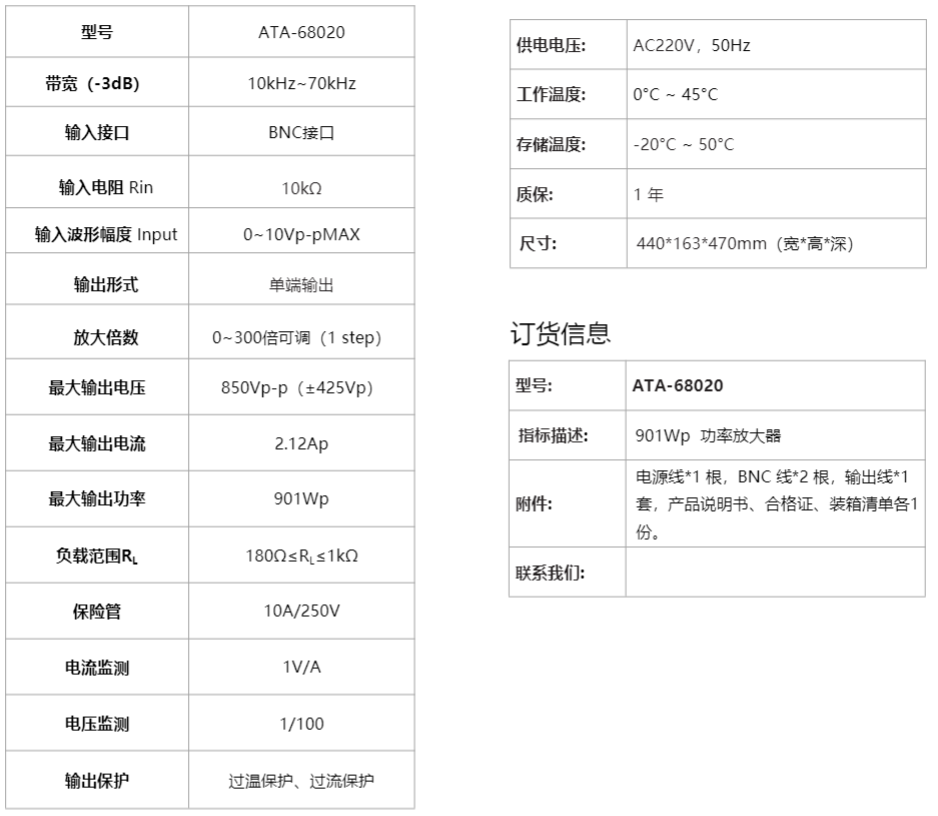
最大输出电压850Vp-p(±425Vp)
放大倍数0~300倍可调,1倍步进
输入电阻10kΩ
单通道
与传统“驱动器+执行器”的足式结构设计相比,超声驱动作动器结构简单,易于控制,为仿生运动与结构设计提供了新思路。但超声驱动作动器离不开与之相匹配的高频高压供能与驱控系统的支持。因此,如何将直流电源、直流逆变威廉希尔官方网站
、功放威廉希尔官方网站
集成到超声驱动作动器系统中,实现作动器机械系统与电气系统的阻抗匹配,形成无线缆限制、大范围可移动的超声驱动作动器是未来具有重要意义的研究方向。功率放大器www.aigtek.com
审核编辑 黄宇
-
功率放大器的用途2017-09-19 0
-
超声波功率放大器,Agitek功率放大器应用案例2017-10-11 0
-
超声波放大器,超声功率放大器型号选择2017-10-23 0
-
功率放大器,超声功率放大器定义分类和应用2017-12-15 0
-
超声功率放大器-ATA43152020-02-12 0
-
功率放大器驱动超声波换能器2020-05-21 0
-
分享超声功率放大器如何驱动换能器?2020-12-03 0
-
功率放大器在混凝土中超声波传播测试中应用案例-西安安泰电子厂家2020-12-23 0
-
功率放大器在混凝土中超声波传播测试应用2020-12-25 0
-
【安泰电子】功率放大器厂家科普:什么是超声波探头?2022-08-24 0
-
超声功率放大器原理(超声功率放大器的作用是什么)2023-02-27 1824
-
超声波功率放大器在超声驱动技术中的应用2023-07-06 762
-
功率放大器如何驱动超声波换能器2023-10-18 1109
-
超声功率放大器的技术方案是什么2023-12-21 587
-
Aigtek功率放大器如何驱动超声换能器2024-11-21 181
全部0条评论

快来发表一下你的评论吧 !
